 ATF(TF-A)代码的剖析
ATF(TF-A)代码的剖析

思考:
1、 SOC一上电,只有一个核启动,还是所有核都启动?
2、如果SOC一上电,如果只有一个核启动,那么从核启动的时候,从核的入口是哪里?
3、啥是cold boot?啥时warm boot? 在哪些场景下会使用warm boot?4、啥是cold reset/warm reset/primary boot/senondary boot?
说明:
1、本文以为armv8-aarch64、armv9为例、TF-A代码为例,不讨论其它硬件架构和固件软件中的设计。
2、重点讲述cold reset/warm reset/primary boot/senondary boot之间的流程和概念。
1、基础概念
请先自行理解以下4个概念:
-
cold boot
-
warm boot
-
Primary boot
-
Secondary boot
另外还两种配置:
-
你的reset地址是可编程的,则会配置
PROGRAMMABLE_RESET_ADDRESS=1,与之对立的则是你的reset地址是不可编程的。 -
你在SOC启动的时候,首先只启动一个core,则会配置
COLD_BOOT_SINGLE_CPU=1,与之对立的则是你的SOC启动的时候,所有core都上电了。
2、启动流程
我们就假定 reset地址是可编程的、SOC启动的时候只启动一个core,来讲解我们的boot流程:
(1)、SOC一上电,SOC给ARM Core的signal configuration会改变RVBAR_EL3,这里一般就是就是bootrom的首地址。即CPU一上电,Primary core的PC指向的就是RVBAR_EL3的地址,机器就开始启动了。
(2)、当需要Secondary Core启动的时候,例如会走PSCI协议,【主核】进入ATF会将bl31_warm_entrypoint(或平台自定义的地址)写入到SOC寄存器,改变reset地址(改变RVBAR_EL3的值),然后此时SOC的PMIC给Secondary Core上电,此时Secondary Core也就发生了cold reset,PC从RVBAR_EL3(bl31_warm_entrypoint或平台自定义函数)处开始执行.
总结(针对本文示例情况:reset地址是可编程的、cold boot的时候只启动一个cpu):
-
开机一上电只有Primary Core再跑,从RVBAR_EL3处开始跑,属于cold boot
-
从核启动时,会修改reset的值,影响到RVBAR_EL3的值,然后给从核上电,此时属于Secondary boot,仍然是cold boot.
-
一般会将bl31_warm_entrypoint设置为reset地址,即Secondary Core的启动地址;
-
这个示例中没有用到warm boot
3、ATF(TF-A)代码的剖析
以BL1代码为例分析,该代码适配支持cold reset/warm reset/primary boot/senondary boot等诸多场景。
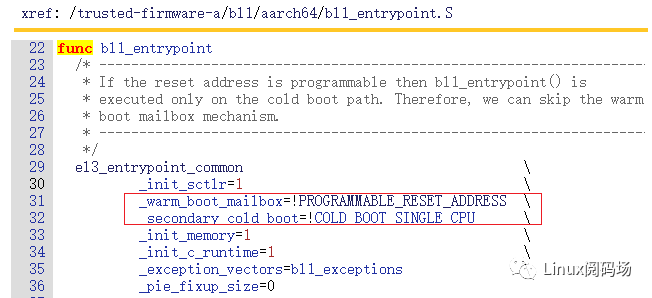
-
如果reset是可编程的,
PROGRAMMABLE_RESET_ADDRESS=1, 则_warm_boot_mailbox=0,则下面这段代码不会被编译,无论cold boot还是warm boot都不会走_warm_boot_mailbox。 -
如果reset是不可编程的,
PROGRAMMABLE_RESET_ADDRESS=0, 则_warm_boot_mailbox=1,则下面这段代码会被编译,但cold boot走do_cold_boot流程,warm boot需要走br x0流程
-
.if \_warm_boot_mailbox -
/* ------------------------------------------------------------- -
* This code will be executed for both warm and cold resets. -
* Now is the time to distinguish between the two. -
* Query the platform entrypoint address and if it is not zero -
* then it means it is a warm boot so jump to this address. -
* ------------------------------------------------------------- -
*/ -
bl plat_get_my_entrypoint -
cbz x0, do_cold_boot -
br x0 -
do_cold_boot: -
.endif /* _warm_boot_mailbox */
-
如果SOC启动的时候只启动一个core,
COLD_BOOT_SINGLE_CPU=1,_secondary_cold_boot=0,则下面代码不被编译, 则无论主核还是从核都不需要走_secondary_cold_boot流程 -
如果SOC启动的时候启动多个core,
COLD_BOOT_SINGLE_CPU=0,_secondary_cold_boot=1, 则下面代码会被编译,则主核走do_primary_cold_boot流程, 从核需要走plat_secondary_cold_boot_setup流程
-
.if \_secondary_cold_boot -
/* ------------------------------------------------------------- -
* Check if this is a primary or secondary CPU cold boot. -
* The primary CPU will set up the platform while the -
* secondaries are placed in a platform-specific state until the -
* primary CPU performs the necessary actions to bring them out -
* of that state and allows entry into the OS. -
* ------------------------------------------------------------- -
*/ -
bl plat_is_my_cpu_primary -
cbnz w0, do_primary_cold_boot -
-
/* This is a cold boot on a secondary CPU */ -
bl plat_secondary_cold_boot_setup -
/* plat_secondary_cold_boot_setup() is not supposed to return */ -
bl el3_panic -
-
do_primary_cold_boot:
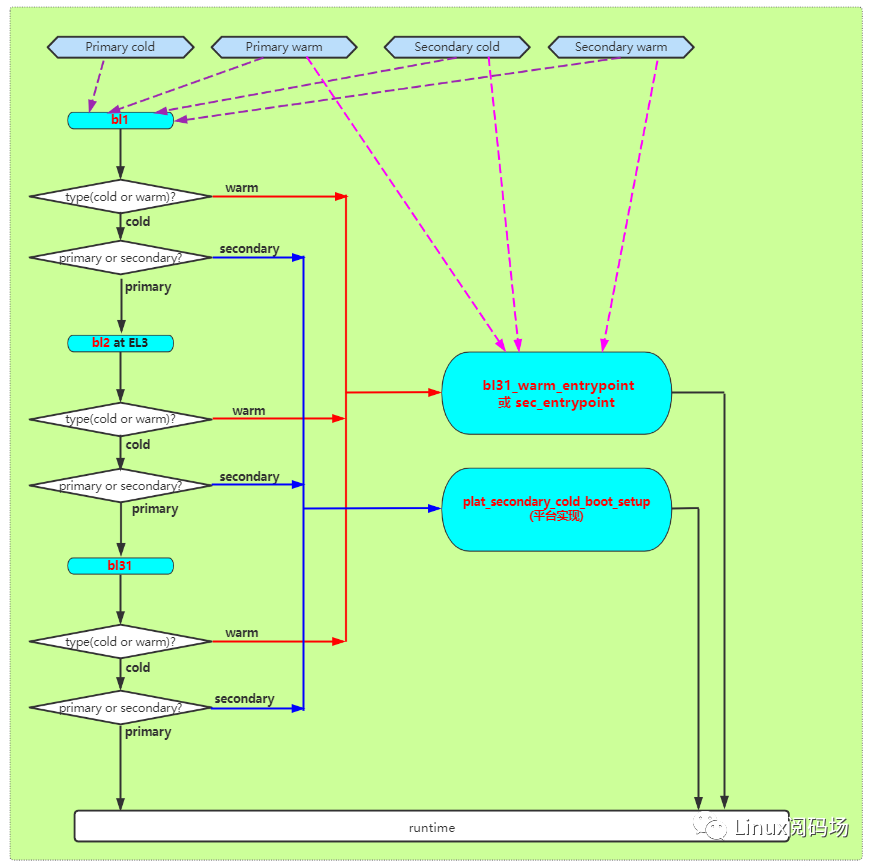
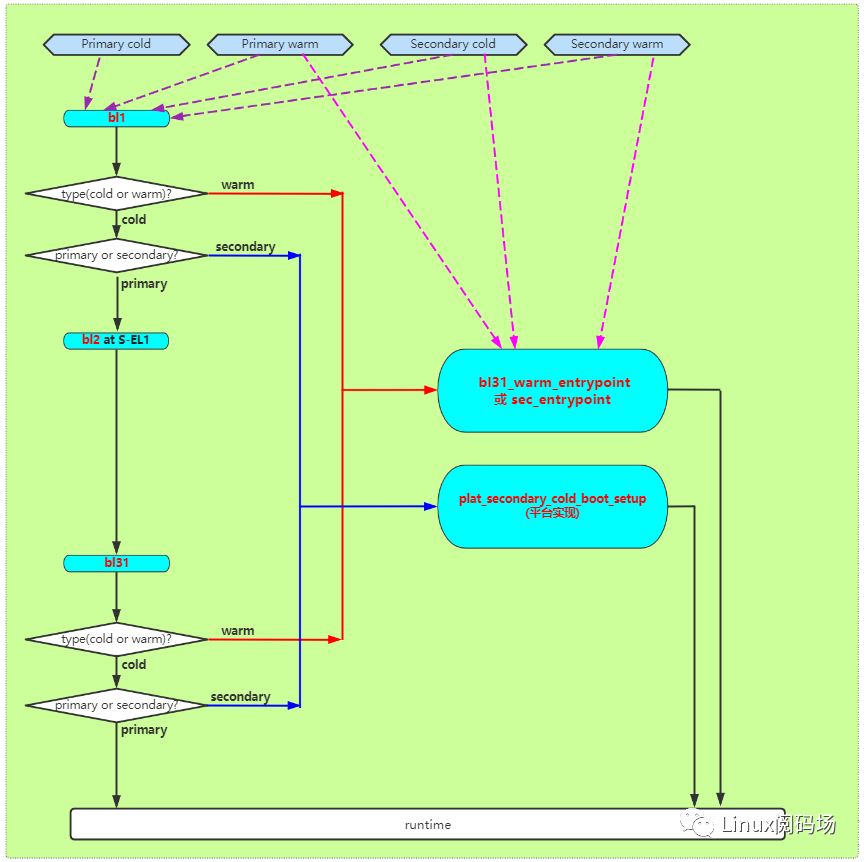
根据以上的代码规则,这里也画了两张图:
(1)、BL2 at EL3的场景
(2)、BL2 at S-EL1的场景
4、软件如何判断当前是cold reset/warm reset/primary boot/senondary boot
TF-A中定义了多核的启动框架,如上一节框图所示,在启动的过程中会进行一些判断,是cold reset还是warm reset,是primary boot还是secondary boot?那么代码中是怎么知道这些状态的呢?
4.1 cold reset和warm reset
这种判断方法由平台实现,其实就是读取mailbox的值。
在第一个核cold boot时,会写mailbox内存(magic,entrypoint...)在第二个核启动时、或第一个核再次启动时(有可能是resume唤醒时),会读取mailbox内存,如果读取到了符合期望的magic的值,则走warm流程,否则走cold流程。注意这里所说的warm流程,只是软件上的warm流程,并非说当前是warm reset。
4.2 primary boot和secondary boot
这种判断方法由平台实现,看似也很简单,一般而言就说读取mpidr寄存器进行判断。
-
(trusted-firmware-a/plat/marvell/armada/a8k/common/aarch64/plat_helpers.S) -
-
func plat_is_my_cpu_primary -
mrs x0, mpidr_el1 -
and x0, x0,#(MPIDR_CLUSTER_MASK | MPIDR_CPU_MASK) -
cmp x0, #MVEBU_PRIMARY_CPU -
cset w0, eq -
ret -
endfunc plat_is_my_cpu_primary
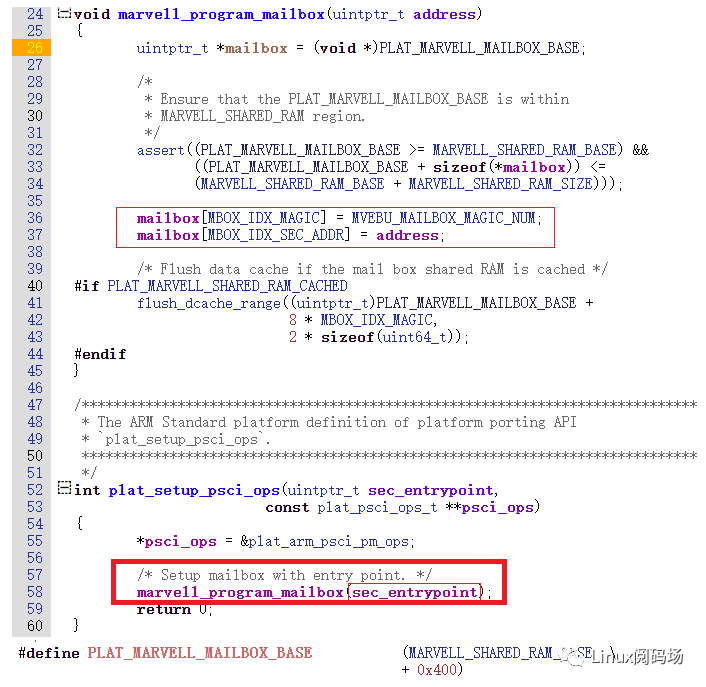
5、mailbox的介绍
5.1 mailbox是什么
mailbox就说一块内存,所有的core都能访问这块内存。第一次启动时,core会填充mailbox,将其下次resume时的地址、secondary core的启动地址、warm reset的地址写入到mailbox内存中,这几个地址其实是一个地址。同时也会将这个地址写入到SOC PMIC寄存器中,影响到RVBAR_EL3的值。
当SOC一上电所有core都启动的这种情况下,主核会继续跑,从核会在SOC一上电就进入wfi状态。当从核需要继续启动时,该core从BL1 BL2 BL31正常流程启动时,会在BL1、BL2 at EL3、BL31中,强制跳转到mailbox的地址,跳过主核已经初始化的部分;
当SOC一上电,只有一个core上电的情况下,主核继续跑,从核未上电。当从核需要启动时,相当于cold reset,从核会直接从RVBAR_EL3处开始跑,也就是你设置的entrypoint。
5.2 mailbox的作用
mailbox中定义了entrypoint地址,当core从BL1 BL2 BL31正常流程启动时,会在BL1、BL2 at EL3、BL31中,强制跳转到mailbox的地址,以跳过已初始化的部分。
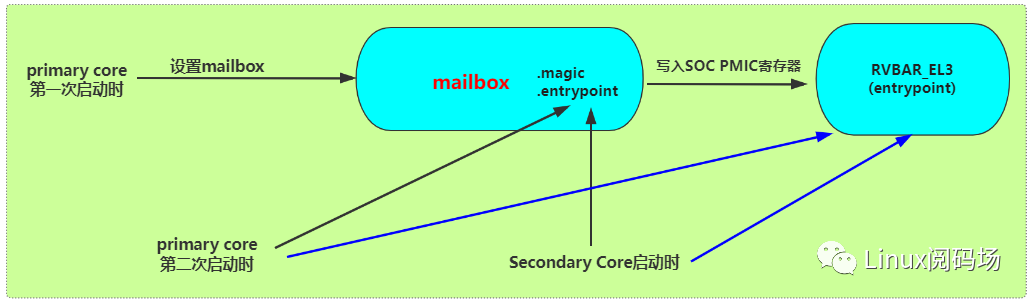
5.3 mailbox的示例
其实就是定义了一块内存,主核第一次跑时,会填充该内存。主核第二次跑时或从和跑时,检测该内存已经填充过了,则走warm启动流程,即强制跳转到mailbox中的address地址。
6、具体场景的总结
-
串口中断中敲击reboot命令、或系统panic时导致的机器重启:在一些的SOC厂商设计中,应该是code reboot。比如在Linux Kernel中敲击reboot,到底层还是写的一些寄存器控制pmic(或PMU),直接给cpu下电了。然后再上电,SOC还是会给Core发送signal configuration,此时RVBAR_EL3又会变成ASIC设置的值.
-
Suspend和Resume:比如我在看ATF中的海思平台,在ATF的suspend函数,将bl31_warm_entrypoint地址写入到了SOC PMIC的一个寄存器中(上电时,该寄存器会影响的是RVBARADDR信号)。此时系统深睡的时候,应该是Linux Kernel调用到ATF,将bl31_warm_entrypoint地址写入到了pmu/pmic相关的寄存器中,在下一次reset时,会影响到signal configuration继而改变RVBAR_EL3的值。然后还会给各个模块下电(给哪些模块下电是SOC的设计和逻辑),最后再给ARM Core下电, 这就算是深睡了。Resume的时候,也是有一些SOC的硬件行为,然后再给Core上电,那给Core上电后,一上电执行的是哪里?
PC还是指向RVBAR_EL3中的地址,当然这是我们suspend的时候更改过的,其实就是bl31_warm_entrypoint
-
RMR_EL3:本文中都没有提到RMR_EL3。那么RMREL3是干啥的呢?这是ARM的一个feature,怎么用?是你自己的设计,随便你。你写RMR_EL3中的bit,就可以触发warm reset. 一般的kernel dump、或者一些工具,就可以主动触发RMR_EL3,然后去干一些活. 还有在csdn上看到一篇高通soc的启动流程的博客,他们正常的启动流程中,某一个镜像跳转到另外一个镜像时,竟然就是写了一些RMR_EL3,触发warm_reset,另外一个镜像的地址恰好就是warm reset的跳转地址。
审核编辑 :李倩
-
soc
+关注
关注
40文章
4658浏览量
230576 -
架构
+关注
关注
1文章
537浏览量
26664
原文标题:SOC的多核启动流程详解
文章出处:【微信号:LinuxDev,微信公众号:Linux阅码场】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
IMX-ATF lf_v2.12 和 LF-6.12.20-2.0.0 的手动构建失败,如何手动执行当前的 ATF 构建吗?
电子工程师视角:LCD - S3X1C50TF/B液晶显示屏剖析
电子工程师视角下的LCD-S301C31TF液晶显示屏解析
是否可以重写TF 文件的内容或添加新的 TF 文件?
LX2160 BootROM是否可以从 I²C 加载 RCW PBI,从 QSPI 加载 BL2?
深度剖析AD5122A/AD5142A数字电位器:特性、应用与操作指南
CONFIG_STATIC_DDR 在 LS1028ARDB 上破坏 ATF 编译的定义,怎么解决?
Atmel ATECC508A CryptoAuthentication 设备的技术剖析与应用探索
AD9054A:8位、200 MSPS ADC的技术剖析
RZ/A2M Group芯片:技术剖析与设计应用指南
Onsemi FQT1N80TF-WS N沟道MOSFET深度解析
CS5371A/CS5372A:高性能ΔΣ调制器的技术剖析与应用指南
HCS300:高性能代码跳频编码器的技术剖析与应用
如何使 i.MX93 上的 U-Boot SPL 和 ATF/BL31输出静音呢?
TF卡烧录异常该如何处理?




评论