 CANsec CAN-XL第2层安全协议
CANsec CAN-XL第2层安全协议

1. 动机
CAN Bus 不安全可能是当今汽车网络中被提及最多的安全问题。已经发表了许多关于为什么车辆容易受到攻击的论文,其中 CAN 总线是这些声明的核心。其根本原因在于,上世纪 80 年代发明的 CAN 总线并未考虑网络威胁,这或许是可以理解的,因为车辆连接性尚未纳入范围。随着车辆功能的发展和对安全性的需求变得越来越明显,提出了许多安全解决方案来解决 CAN 不安全问题。也许最有说服力的解决方案是 AUTOSAR 提出的解决方案,它依赖于使用共享对称密钥验证 CAN 帧并包括新鲜度保护:
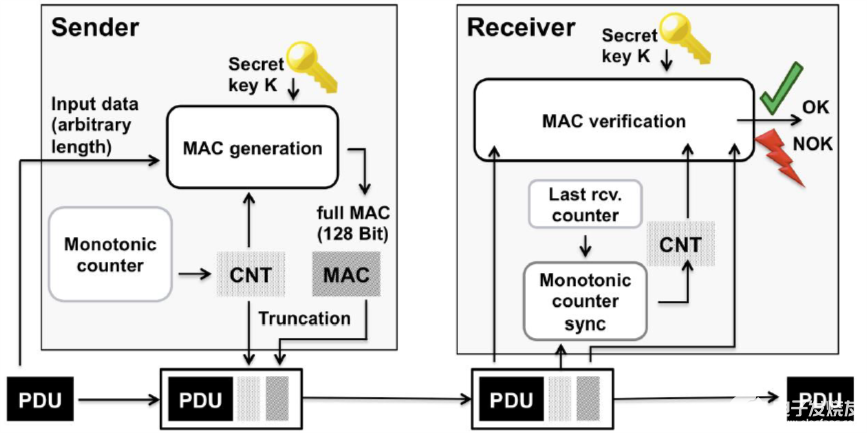
图 1 Autosar 中的 SecOC 流程
由于 AUTOSAR 的普及,该解决方案是当今最流行的解决方案,但由于执行新鲜度管理和数据认证任务需要多层软件,因此会对主机 CPU 造成性能损失。
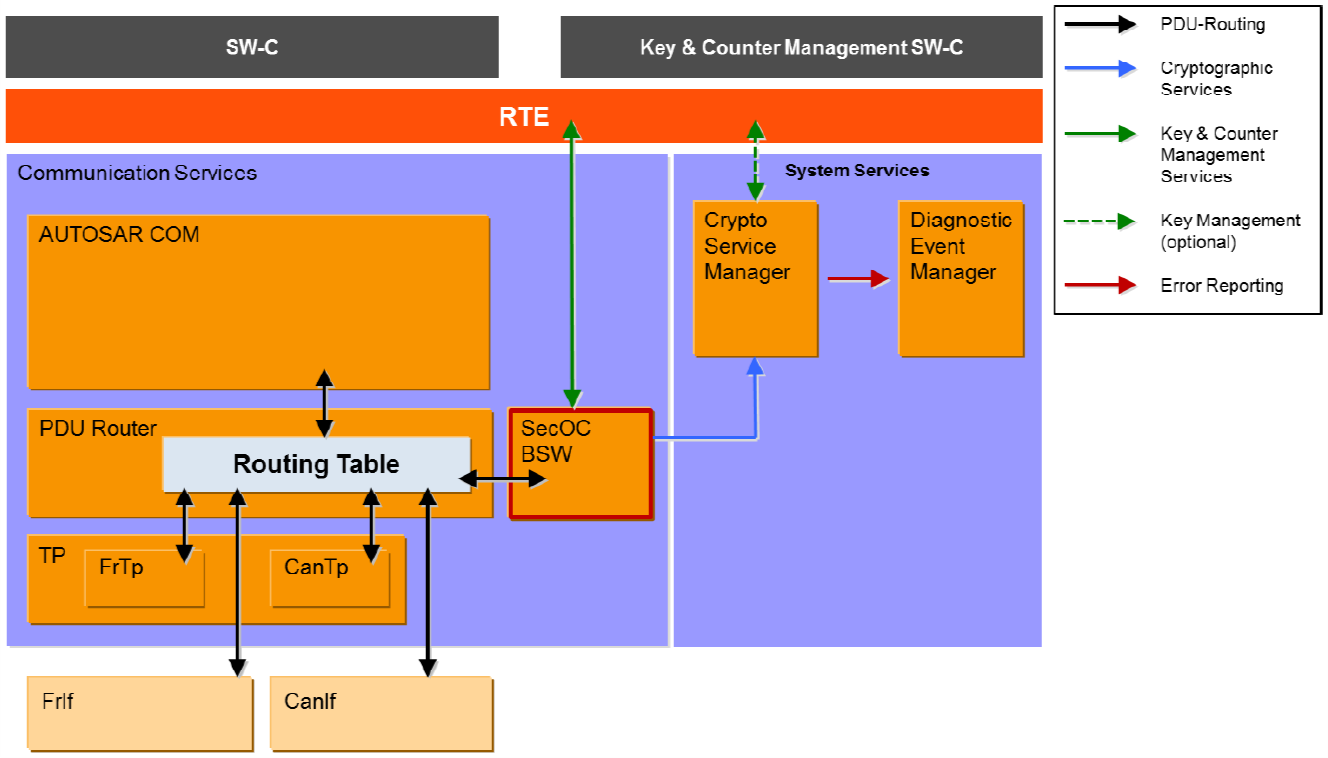
图 2 Autosar 分层架构中的 SecOC BSW
如上所示,当收到一个安全的PDU时,它会被路由到SecOC进行MAC验证。SecOC 依靠新鲜度值管理器 (FVM) 来确定接收到的新鲜度值是否在可接受的窗口内。在这里,可以根据 OEM 偏好使用各种 FVM 策略。由于 CAN 有效载荷长度有限,许多解决方案需要截断的新鲜度值,这导致需要定期同步完整的新鲜度值。在 FVM 的响应之后,SecOC 将请求发送到加密服务管理器 (CSM) 以执行加密功能以验证 MAC。在将结果返回给 SecOC 之前,CSM 可能依赖软件库或 HSM 加密驱动程序来执行这项工作。最后,如果验证成功,则 SecOC 将 PDU 转发到 PDU 路由器,或者引发错误标志并丢弃帧。这些任务对应的 CPU 工作量很大。
由于趋势是消息和 CAN 通道的数量增加,CPU 开销惩罚的问题只会变得更糟。为了满足吞吐量需求,芯片供应商提供集成在硬件安全模块 (HSM) 中的 AES 加速器。但经验表明,负责处理数百条消息的身份验证请求的中央 HSM 由于数据复制进出 HSM 的开销而成为瓶颈。请注意,AES 引擎延迟仅占 HSM 执行身份验证所花费的总时间的一小部分。大部分延迟是由于作业设置、数据传输、作业调度、密钥获取和响应主机的软件开销造成的。随着 CAN XL 的推出,它将支持高达 2048 字节长的有效载荷和高达 10Mbps 的波特率,对 HSM 的性能要求必然会变得更差。如果除了身份验证之外还需要加密,那么将数据传输出 HSM 的额外开销将进一步增加主机 CPU 传输或接收数据的总体延迟。显然,今天的安全硬件和软件架构是不够的。
2. 威胁模型
CAN总线面临许多威胁。此处的列表显示了最令人担忧的威胁:
欺骗:由于 CAN 总线的广播特性,任何 CAN 节点都可以通过欺骗 CAN ID、DLC 和有效载荷来发送任何消息
嗅探和重放:由于 CAN 数据的开放性和丰富的 CAN 分析工具,CAN 帧可以很容易地被嗅探和重放,以使 ECU 执行某些功能,例如解锁门或应用中断
否认:由于 CAN 总线的广播特性,当传输恶意 CAN 帧时,无法证明哪个 ECU 负责发送虚假消息
资源耗尽:当使用 AUTOSAR SecOC 启用消息身份验证时,恶意攻击者可以发送精心挑选的新鲜值,使接收者忙于验证同一帧的真实性以耗尽 CPU 资源
拒绝服务:恶意 ECU 可以连续发送零 ID 消息,导致它们始终赢得仲裁并拒绝其他 ECU 在总线上成功传输。此外,不合格的 CAN 硬件可以通过破坏某些字段(例如插入填充位或修改物理层 CRC)来杀死特定的 CAN 帧,从而导致目标 ECU 进入 BusOff 状态。
CANsec 可以解决除拒绝服务之外的所有上述威胁,拒绝服务需要额外的检测和预防机制。
3. 安全 CAN 控制器
为了在降低 CPU 开销的同时应对数据认证的吞吐量和带宽不断增长的需求,建议将 CANsec 层集成到 CAN 控制器中,以支持线速的认证和/或加密。
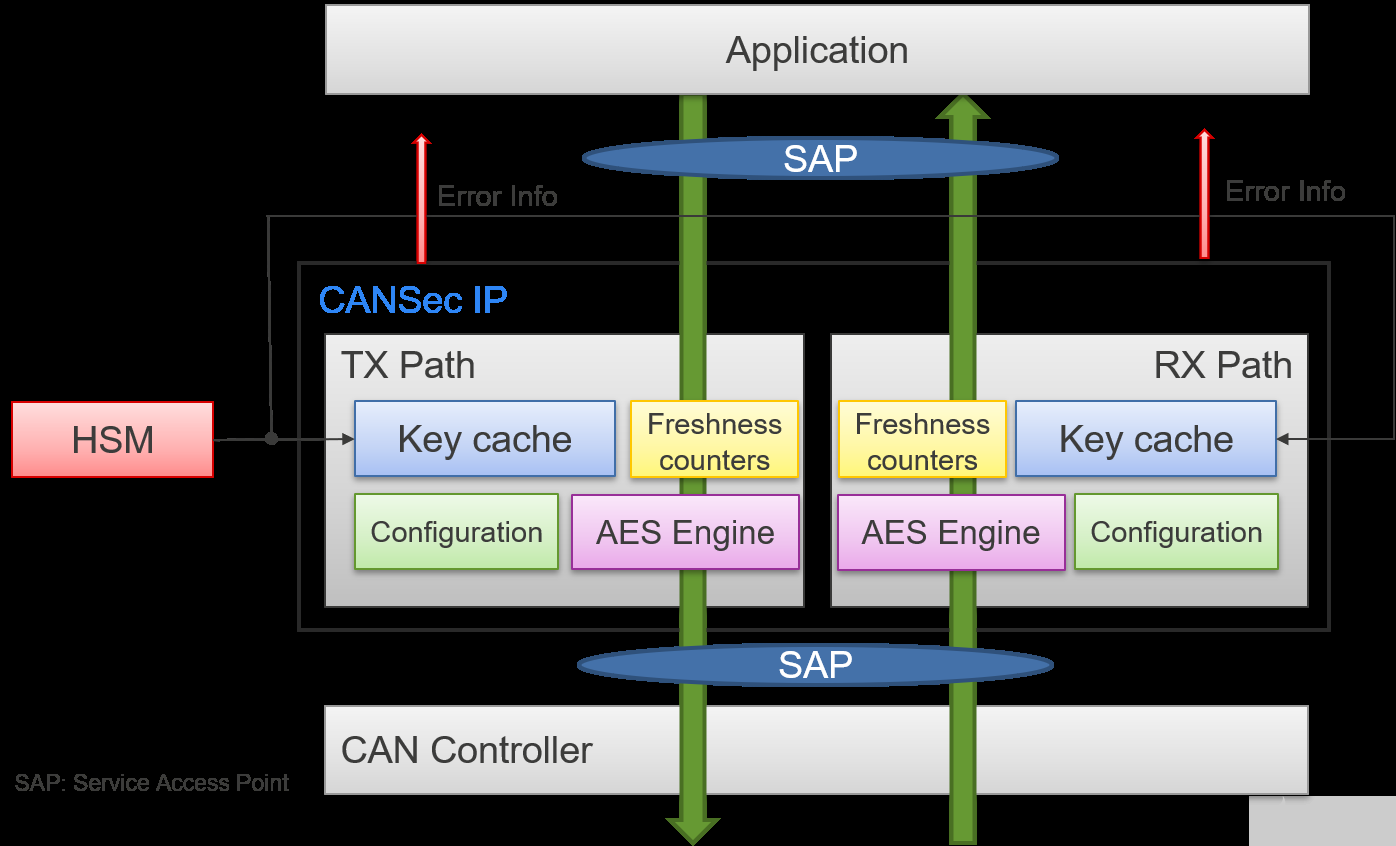
图 3 CANsec 架构
在 ECU 启动期间,车载通信密钥从 HSM 安全存储器缓存到 CAN 控制器专用 KEY RAM。此 RAM 只能由 HSM 通过专用总线访问,以防止恶意 CPU 访问。它也只能由 CAN 控制器内的 AES 引擎直接访问。添加了额外的 CAN 寄存器以允许用户为每个安全通道标识符 (SCI) 指定密钥索引映射。类似地,为每个消息添加一个专用寄存器来存储帧新鲜度值。后者必须在 ECU 关闭之前存储到安全内存中,以确保在下一个引导周期同步。当接收到 CAN 传输请求时,CAN 控制器执行以下序列:
根据 SCI 的密钥索引获取密钥明文值并加载到 AES 引擎中
获取新鲜度值并将其增加 1
输入 CAN ID | 下载内容 | CAN 负载 | Freshness Value, Payload Type, 进入 AES 引擎生成完整性校验值 (ICV)
当帧以线速传输时,将 CANsec 标头(新鲜度值)和 ICV 插入有效负载
在接收期间,将遵循类似的过程,并附加将接收到的新鲜度值和 ICV 与预期值进行比较的步骤。为了检查新鲜度,将接收到的值与存储的新鲜度值加上预配置的接受窗口进行比较。这对于允许可能不同步的 ECU 重新同步到接收到的新鲜度值是必要的,而无需复杂的新鲜度值管理策略。如果 Freshness 和 ICV 值都符合预期,CAN 控制器会使用接收到的值更新 Freshness Value 寄存器并设置接收标志以让应用程序处理数据。否则,它会设置错误标志以通知主机 CPU 接收到帧但数据无效。
4. 概念证明
瑞萨电子进行了一项可行性研究,以证明实施 CANsec 概念是有意义的。基于 CiA 613-2 CANsec 规范的早期版本,在 FPGA 中实现了原型 CANsec 实现。为了比较苹果和苹果,我们还在软件中实现了 CANsec 协议。由于上述原因,不适合使用 SecOC。
该图显示了基于软件的实现所需的 CPU 性能。处理时间与 Payload 数据量成正比,这是显而易见的,因为更多的数据需要更多的时间来处理。预计 CANsec 软件的 RX 延迟和 TX 延迟不会有不同的斜率。相反,模型应该具有几乎相同的斜率。但是在 SW 中还有一个更大的步骤是为了发送帧而不是为了接收帧。这可能是软件优化的一个领域。但是,接收和发送的总体趋势是相同的。
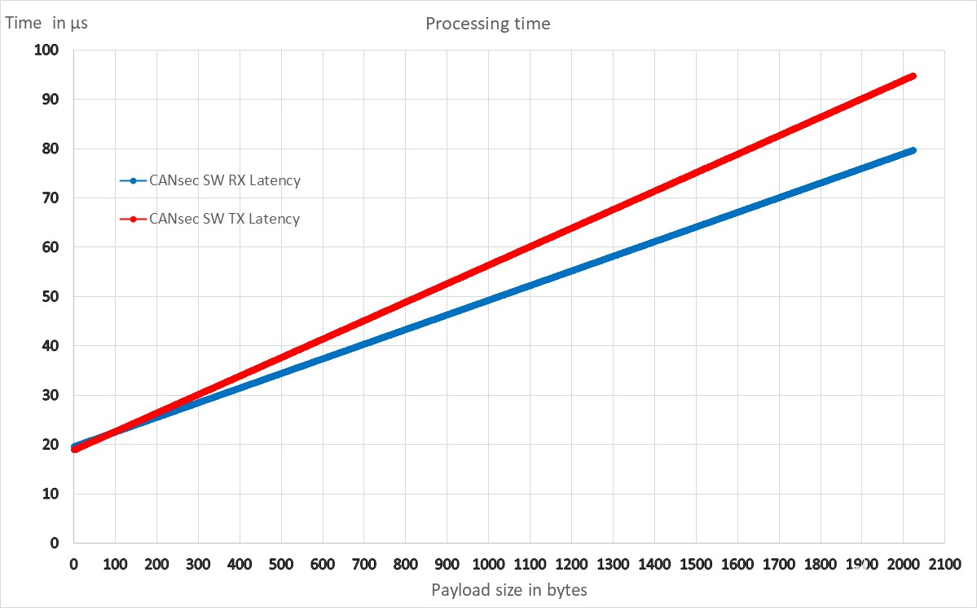
图4 CANsec CPU处理时间
该软件在 1.2GHz 的 R-Car H3 SoC 的 ARM 内核上运行。如果这个数据会被分解到一个 400MHz 的 MCU;那么在 100% 的总线负载下,CPU 将被占用 25%(@252byte 有效负载)。这是一项相当大的工作,考虑到这样的 MCU 有多个 CAN-XL 通道,那么 CPU 很快就会过载。因此,将其实现为 CAN-XL IP 中的硬件加速功能是有意义的。
下图显示了硬件实现的处理延迟。CANsec 模块在 CAN 控制器的数据路径中实现。为此,延迟必须比 CAN 总线上的 CAN-XL 帧处理时间短,以确保以线速进行处理。在我们的原型实现中,CANsec 模块的时钟频率为 80MHz,并使用 16 个 S-Box 进行 AES 算法,通过这种设置,我们得到的值远低于 CAN 总线上消息的占用时间。例如,可以通过使用更少的 S-Box 来消耗更少的芯片尺寸来实现进一步的优化。
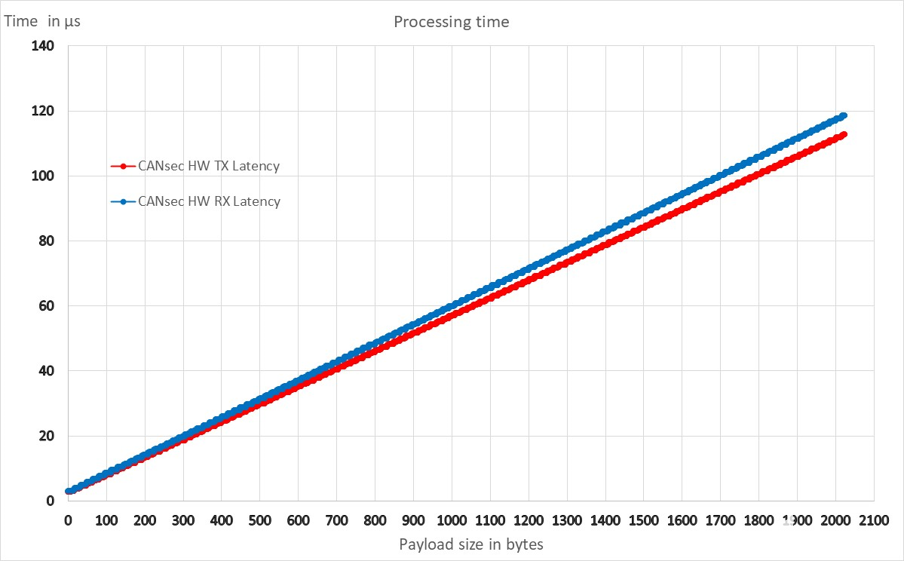
图 5 CANsec 硬件延迟时间
5. 结论
CANsec 是一种实用的解决方案,可保护 CAN 总线免受 CAN 网络面临的最常见威胁,同时减少主机 CPU 开销和对更大、更强大 HSM 的需求。将高速身份验证/加密任务从 HSM 卸载到分布在外围设备中的加密引擎可以减轻 CPU 负担。通过以线速执行身份验证,它以最小的信号延迟为应用程序提供无缝的安全性。让 HSM 控制密钥缓存可以创建安全策略,以限制 ECU 在应用程序不再被视为受信任时发送安全消息的能力。
进一步表明,在硬件和软件中实现 CANsec 是可行的。当然,在软件中实现将具有与今天基于 SecOC 的实现相同的缺点。然而,软件实现将允许在开始时平滑迁移该技术,当时并非所有控制器都支持 CANsec 的硬件实现。
审核编辑:郭婷
-
控制器
+关注
关注
114文章
17646浏览量
190272 -
CAN
+关注
关注
58文章
3013浏览量
471491 -
总线
+关注
关注
10文章
3014浏览量
91309
发布评论请先 登录
直播回顾 | CAN XL新标准落地难?从协议解析到实践应用,虹科技术专家带您全面探索CAN XL的技术突破与落地

基恩士PLC使用EtherNet/IP协议通过EtherNet/IP转CAN协议转换网关与CAN协议IO卡通讯案例

CAN XL通信技术在车载毫米波雷达中的应用(2)

CAN XL通信技术在车载毫米波雷达中的应用(1)

协议分析仪需要支持哪些常见协议?
一文读懂CAN XL协议
用芯岭技术XL433接收发射芯片开发的火灾报警器
CAN XL安全实践:深度防御下的密钥协商优化

汽车通信新突破!PCAN-XL首发上线!


浅谈CAN协议转换模块
基于Vector工具进行CAN协议错误帧的分析实践






 工商网监
工商网监
评论