 KUKA大众标准--带基移位的搜索运行(相对子程序)
KUKA大众标准--带基移位的搜索运行(相对子程序)

带基移位的搜索运行(相对子程序)
标志 720 必须在宏 57 中打开
必须选择夹具 TCP (RobWzg) 的方向,以便要移除的组件在 X+ 中移动。容器的测量方式应使底座的 X+ 与搜索运动的方向相同(搜索运行中的 X+ RobWzg)。
使用基本移位搜索
4:LIN SUCHEN VB=500[mm/s] RobWzg=1 Base=1 Fern=Mxx Vred=5% Nah=Mxy P
1: FB PSPS = EIN
2: TECH1 Baseverschiebung Suchlauf Base 31 vorbesetzen Techaufruf=EIN
3: WARTE BIS E23
4: FB PSPS = E14 & E24 & E44 & E80 & M1 & M3
5: LIN VB=200[mm/s] VE=100% ACC=100% RobWzg=1 Base=31 SPSTrig=0[1/100s] P
1: FB PSPS = E14 & E24 & E44 & E80 & M1 & M3
Mxx 和 Mxy~ 远近传感器必须防断线!!!
F558 :
~ 正确的搜索运行选择
~ 必须手动设置,由 TECHPAKET 设置
~ 重新设置!!!
只有在搜索完成后机器人手控器上出现“Search new base was set”消息时,才能学习第 5 - 8 点!!!
寻找轨迹找到最后一个工件前面有件会自动校正轨迹向后
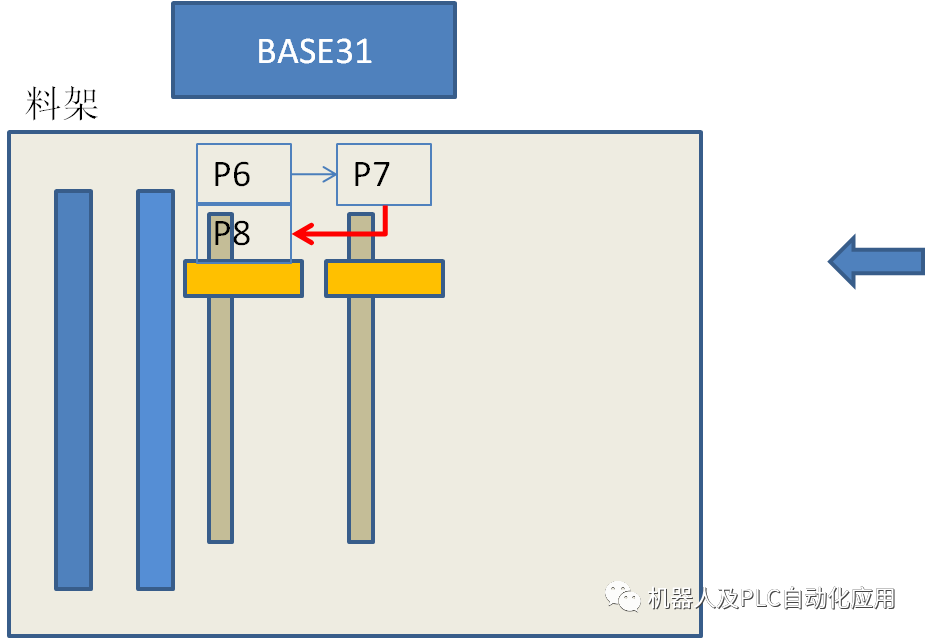
LIN SUCHEN VB=350[mm/s] RobWzg=1Base=26 Fern=M28 Vred=10% Nah=M29 P
P6---接触工件位置M29
LIN VB=700[mm/s] VE=0% ACC=100% RobWzg=20 Base=31 SPSTrig=5[1/100s]P
P7---返回测量位置
LIN VB=400[mm/s] VE=0% ACC=100% RobWzg=31 Base=31 SPSTrig=5[1/100s]P
P8---抓件
寻找轨迹程序的最远端
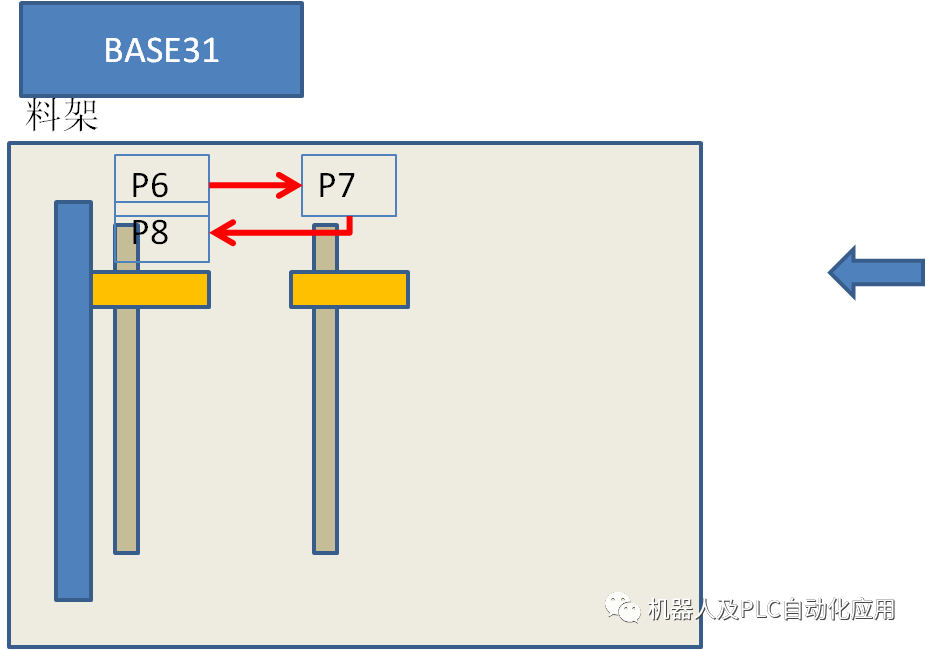
LIN SUCHEN VB=350[mm/s] RobWzg=1Base=26 Fern=M28 Vred=10% Nah=M29 P
P6---接触工件位置M29
LIN VB=700[mm/s] VE=0% ACC=100% RobWzg=20 Base=31 SPSTrig=5[1/100s]P
P7---返回测量位置
LIN VB=400[mm/s] VE=0% ACC=100% RobWzg=31 Base=31 SPSTrig=5[1/100s]P
P8---抓件
程序分析:
Tech_ BaseverschiebungSuchlauf Base 31 setzen - - -xyz-MaxWeg:- Nah
Name = Baseverschiebung ---基坐标转移
[P1]:
Visible = True
Enum=True
num1=Base 31 vorbesetzen BASE31预填充
num2=Sensor
num11=Suchlauf Base 31 setzen 设置搜索运行 Base 31
num20=VW_XYZ-Scan VW_XYZ 扫描
[P2]:
Visible = True
Enum=True
num1=Dehnfuge1_Korr_X(-) 伸缩缝1
num2=Dehnfuge1_Korr_Y(-)
num3=Dehnfuge1_Korr_Z(-)
num11=Dehnfuge1_Korr_X(+)
num12=Dehnfuge1_Korr_Y(+)
num13=Dehnfuge1_Korr_Z(+)
num21=xyz-Init 初始化
num22=xyz-Referenzfahrt 参考运行
num23=xyz-Messfahrt 测量运行
-------
CASE 11; 搜索成功后设置基数
CONTINUE
WHILE(VW_MPARA_ACT.BASE_NO<1)
MLD(18,#QuitMsg); 基数不正确
ENDWHILE
IF $FLAG[Fehler_Suchlauf]==TRUE THEN
MLD(16,#QuitMsg); 搜索运行出错
ENDIF
;设置基数 31 BASE_TYPE[..]=#BASE
IF(BASE_TYPE[VW_MPARA_ACT.BASE_NO]==#BASE)THEN
CONTINUE
$BASE=$NULLFRAME
$BASE=$pos_act
BASE_DATA[31]=$BASE
IF NOT $EXT THEN 在手动时会有提示,自动时没有
MeldNr(4) ;新基地已定
HALT
ENDIF
ENDIF
----------------------END----------------------
审核编辑 :李倩
-
传感器
+关注
关注
2578文章
55811浏览量
795416 -
测量
+关注
关注
10文章
5772浏览量
117089 -
KUKA
+关注
关注
3文章
218浏览量
17532
原文标题:KUKA 大众标准--带基移位的搜索运行(相对子程序)
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
歌尔参编!我国首个可穿戴无袖带血压测量设备团体标准发布
74LV595A:8位移位寄存器的全方位解析
变频器带载调试步骤


深入解析STPIC6D595:8位移位寄存器的卓越性能与应用
淘宝搜索API:长尾词挖掘,SEO提升的利器!

1688搜索店铺列表API使用指南
线性搜索与二分搜索介绍
上汽大众10月终端销量9.25万辆
搜索商品ID获取商品详情接口

TPIC6B595 8位功率移位寄存器技术文档总结
SN74LV594A:2-5.5V带输出寄存器的8位移位寄存器技术解析
用拼多多 API 实现拼多多店铺商品搜索权重提升
产品搜索与过滤API接口
根据标题利用API优化电商搜索功能:提升转化率



评论