 KUKAC4机器人使用的Dual NIC网卡
KUKAC4机器人使用的Dual NIC网卡

l网卡(英文缩写为 NIC)是连接电脑与本地网络的电子线路。
l每块网卡都拥有全球独一无二的识别码,即 MAC 地址 MAC 地址。该地址可从网卡上直接读取,也可利用其它工具 (ipconfig)读取。
l如今越来越多的高端网卡使用 1000 MBit 的传输速度。它们采用配备 RJ45 插头的双绞线电缆 (1000BASE-T)来连接。
l普通网卡只拥有一个以太网接口,特殊网卡会拥有多个(多达四个)。
DualNic - B 型网卡
库卡网卡 Dual NIC
lDual NIC 是一种包含两个 1000 Mbit/s 局域网适配器的网卡,
l它们是两个 VLAN。
l第二个端口与 PC 型号相关:
l主板 D2608-K KLI -KUKA 线路接口
l主板 D3076-K KSB - KUKA 系统总线
l在 KR C4 中,Dual NIC 在设备管理器里面不显示在网络适配器下。
l此卡不由 Windows 管理,不在 Windows 中进行参数配置,而是由 KUKA 实时操作系统 VX-Works 进行管理。
l因此全部网络适配器均在 KUKA Realtime OS Device 下显示。
l但是只有 KLI 端口(库卡线路接口)才可直接在库卡 HMI 上接受参数设定。
l在 KR C4 中,DualNIC 在设备管理器里面不是显示在 【网络适配器】之下。该网卡不受 Windows、而受库卡实时操作系统 VX-Works 的管理,也不在 Windows 里进行参数设置。因此所有网络适配器都是显示在库卡 【Realtime OS Devices】项下。但是只有 KLI 端口 (库卡线路接口)才可直接在库卡 HMI 上接受参数设定。

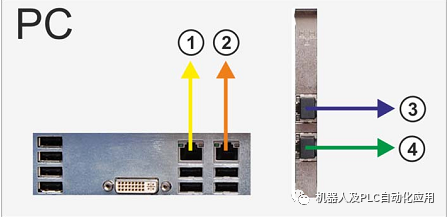
1 KONI - 库卡选项网络接口
2 KLI - 库卡线路接口 (KLI - KUKA Line Interface) 用于PROFINET网络控制
3 KSB - KUKA 系统总线
4 KCB - KUKA 控制器总线
责任编辑:lq
-
控制器
+关注
关注
114文章
17915浏览量
195819 -
机器人
+关注
关注
214文章
31634浏览量
224505 -
总线
+关注
关注
10文章
3065浏览量
91966
原文标题:KUKA C 4网卡DualNic的功能
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
基于米尔RK3576核心板的国产割草机器人解决方案
杰和科技亮相机器人大会,边缘AI驱动机器人场景落地

为什么说关节扭矩传感器是高端机器人的“触觉神经”?
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
探索RISC-V在机器人领域的潜力
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
什么是机器人?追溯机器人技术的演变和未来

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
蓝思科技:今年承接智元机器人全系列多款人形机器人业务
工业机器人线束揭秘 | 性能加持助力机器人作业效率稳定跃升

工业机器人的特点
工业机器人与协作机器人概念不同




评论