 KUKA机器人INTERBUS相关文件的作用
KUKA机器人INTERBUS相关文件的作用
KUKA机器人INTERBUS相关文件的作用:
•用户权限:专家模式。为了编辑机器人程序以外的文件
•选择文件和编辑
•或者:通过按组合键切换到Windows
配置和驱动程序文件:
ISA和PCI卡:
•C:... INIT IOSYS.INI:I / O系统的配置文件.
PCI卡:
•C: ... INIT IBSPCI1.INI:Interbus驱动程序的参数化文件
•C: ... DRIVERS IBPCIDRV.O:所有Interbus PCI卡的驱动程序
IOSYS.INI
由于其在将外围设备连接到机械手方面的核心作用,因此I / O系统的此配置文件始终安装在主分区上。
IBSPCI1.INI
文件IBSPCI1.INI位于控制器的Init目录中。它包含Interbus PCI卡的参数化数据。
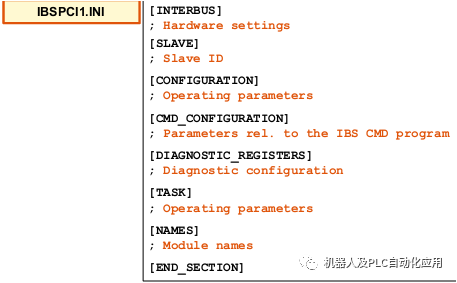
INTERBUS]这主要是用来通知驱动程序在控制器板上进行的硬件设置。
[SLAVE]该部分影响Interbus控制器板从属部分的行为。
[CONFIGURATION]在此设置Interbus控制器板常规操作方法的各种参数。
[CMD_CONFIGURATION]此处,将Interbus卡设置为使用程序IBS CMD的任务。
[DIAGNOSTIC_REGISTERS]这些参数可以通过I / O系统的过程数据映像(无CMD配置)访问卡的内部诊断寄存器。
[TASK]此部分可用于控制驱动程序的独立性。
[NAMES]通过在此处为Interbus网段和模块分配名称,可以使您的系统更加用户友好,例如,发生错误时,此处存储的文本将显示在GUI的消息窗口中。
硬件参数部分:

必须正确设置本节中的参数,才能使Interbus连接正常运行。插图中指定的值对应于默认设置,该设置在系统出厂时由KUKA预装时有效。一些参数控制了底层控制计算机的硬件接口的保留,而其他系统组件可能不会同时使用这些保留。
BOARDNUMBER = 1(必需)
板号用于为IBS卡分配明确的标识符。
控制器用来将自身标识为更高级别的Interbus主站的从站ID。
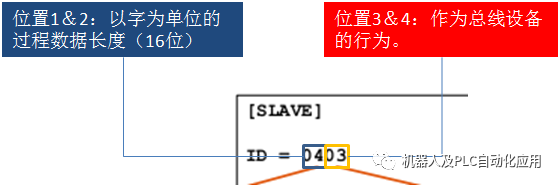
数值必须以十六进制形式输入。例如:16个字的输入和输出:ID = 1003
ID = LLTT(可选,对于PCP流量是必需的)
ID的指定值由两部分组成,它们被解释为十六进制数。前两个位置以字s表示过程数据长度,控制板用来与高层Interbus交换过程数据。
LL = { 01, ..., 10 }
最后两个位置描述了卡如何充当总线设备,以及卡支持PCP通信的数据宽度。
TT:
03:带数字量输入和输出的系统耦合器
E8:带有2个PCP字的系统耦合器
E9:带有4个PCP字的系统耦合器
EB:带有一个PCP字的系统耦合器
如果存在此参数,则此信息将始终覆盖Interbus卡上的DIP开关的设置。从站ID只能设置一次。为了将从站ID重新分配给控制器板,必须中断从站连接的电源。
IBSPCI1.INI文件解读:
SLAVERING 从动
= 1(默认)=>初始化从站并生成错误消息。
= 0 =>从设备未初始化,并且不会生成任何错误消息。
SWAP_SLAVE_BYTES
选项SWAP_SLAVE_BYTES可用于指定驱动程序自动交换(从设备的)字节。
CONTINUE_BY_ERR
如果此标志设置为0,则在从属环发生故障时,将禁用驱动器的读写功能。直到消除了从属环中的故障后,才能再次启用读取和写入功能。
MASTER_TO_SLAVE_OK
INI文件中的该条目可用于在高层环网中提供位,以指示控制器中的Interbus驱动程序仍处于“正在运行”状态。只要驱动程序处于“ 正在运行”状态,如果发生故障或尚未开始,则将其重置。这样就无法再从控制器设置或重置该位。IN I文件中的条目解释如下:
0 =>未设置位
1-n =>从站的起始地址之后,在从站的I / O输出存储器中的位位置。
重新启动或热启动之后,直到写入输出数据后,该位置位。
WATCHDOG = 0 ... 7(可选a7}(可选)
= 0(默认)=>卡上的看门狗未激活。
> 0 =>卡上的看门狗已激活。每次读取数据都会触发卡上的看门狗。如果未在指定时间内触发看门狗,则IBS停止,并且在GUI上显示相应的错误消息。指定的值根据.
以下列表:
(7 = 16.4毫秒,6 = 32.8毫秒,5 = 65.5毫秒,4 = 131.1毫秒,3 = 262.1毫秒,2 = 524.3毫秒,1 = 1048.6毫秒。)
仅当在IOSYS.INI中还配置了输入时,才激活看门狗,因为仅在“读取”功能中触发了看门狗,并且仅在还配置了输入时才调用“读取”功能。
MASTERRING = 0、1(可选)
此参数通知驾驶员是否要激活(1)Interbus卡的主连接(0)。
LOGFILE = logibuspci.log (例)
日志文件的名称。指定日志文件名将激活日志记录功能。可以指定名称及其路径(相对于KRC目录)。默认设置为无名称且无日志记录。
CONTINUE_WITH WARNING = {0,1}(可选)
如果将此参数设置为1,则在发生总线故障时,驱动程序将继续处理。如果值为0,则驱动程序的行为与总线错误相同,即它会停止过程数据通信。
PASSIVE_UPDATE = {0,1}(可选)
在主环中发生总线故障时,驱动程序的输入映像将被冻结,这意味着控制器无法再将其状态发送给从属环中的更高级别的主控制器。如果将此参数设置为1,驱动程序将继续读取输入。
SWAP_MASTER_BYTES
该条目可用于指定要交换(主模块中的模块的)字节
由驾驶员自动执行。但是,对于数字模块,驱动程序仅执行此交换。
没有交换模拟模块。
= 0(默认),禁用交换。
= 1交换激活。
RESET 重启
为了在系统启动时将控制板设置为定义的状态,可以在初始化控制板之前执行复位。
= 0当IBS驱动程序启动时,不执行任何复位。
= 1(默认值)当驱动程序启动时执行复位;系统最多等待15秒钟,以进行复位并让控制器再次运行。如果在这15秒钟内无法对控制板进行寻址,则驱动程序的启动将中止。
= 2-n在这里,与设置1一样,将进行复位,并且系统将等待指定的秒数。如果在指定的时间后无法对控制板进行寻址,则驱动程序的启动将中止。
CHECKLEVEL
= 0(默认)=>不检查配置。
= 1 =>将为主机配置的I / O位的数量与实际存在的模块进行比较;在不准确的情况下,驱动程序的加载将中止。此处考虑了INACCURACY下的规范。
INACCURACY不准确
配置检查的准确性(即,IOSYS.INI中可配置的位数比连接到IBS的位数多)。
默认设置为0。
BAUDRATE = {1200、2400、4800、9600}(可选)
您可以使用这些参数设置Interbus卡上串行接口的传输速率。仅当在KRC的PC上操作了CMD软件时,才需要设置1200波特(请参见“ CMD”一章)。
CMD_FILE =项目文件路径(逻辑寻址所必需)
此参数用于告诉驱动程序要加载哪个Interbus项目文件。在通过IBS CMD程序配置了总线结构之后,您可以将该Interbus项目保存为一种特殊的文件格式,该格式可以由Interbus卡评估。这些文件以.SVC结尾。参数CMD_FILE只能与具有逻辑Interbus寻址的I / O配置一起使用。
EXTERN_START={ 0, 1 }(optional)
如果EXTERN_START为1,则驱动程序希望将引导项目保存在Interbus卡上。否则,EXTERN_START必须设置为0。
STATUS =字节偏移量(可选)
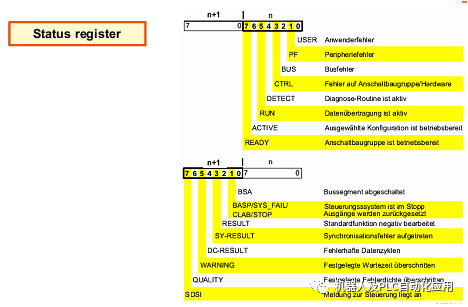
这将导致Interbus控制器板的I / O映射中的位置保留给状态字。可以通过IOSYS.INI中的分配使状态字可被控制器访问。
PARAMETER =字节偏移量(可选)
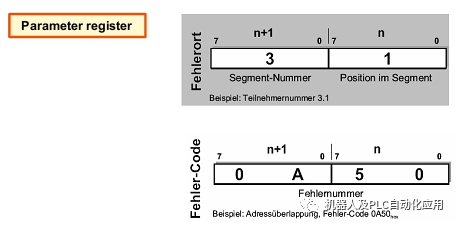
这将使Interbus控制器板的I / O映射中的位置保留给参数字。可以通过IOSYS.INI中的分配使参数字可供控制器访问。参数寄存器内容的含义取决于当前活动的状态位。
PARAMETER2=Byte offset
这将导致Interbus控制器板的I / O映射中的位置保留给Interbus卡的第二个参数字。可以通过IOSYS.INI中的分配使该附加参数字可供控制器访问。
AUTORESTART =时间(可选)
“任务”部分的参数接收总线故障后驱动程序在等待自动尝试重新启动之前等待的时间(以秒为单位)。值为零(0)时,驱动器不会进行任何自动重启尝试。
NIndex= Seg.Mod:Name(可选)
这里的“索引”是一个序号> = 1。条目Seg指定段号,Mod表示总线设备的位置。在冒号之后输入Interbus模块的名称(最多18个字符)。
-
机器人
+关注
关注
206文章
27020浏览量
201364 -
机械手
+关注
关注
7文章
311浏览量
29273
原文标题:KUKA机器人interbus使用之IBSPCI1文件之详解
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
LabVIEW的六轴工业机器人运动控制系统
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
ai人工智能机器人
基于Matlab和VR技术的移动机器人建模及仿真
KUKA C 2机器人 InterBUS网络设置

profinet转ethernet网关连接发那科机器人配置案例
KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤

自编程机器人,售后难做吗?
如何快速地让机器人投入生产
VASS版本的-KUKA机器人的数据提供

KUKA机器人密码介绍





 工商网监
工商网监
评论