 从网络驱动到CAN驱动
从网络驱动到CAN驱动

一年多来,搞嵌入式驱动开发项目做的不少:
从网络驱动到CAN驱动、从Dataflash驱动到NAND/NOR FLASH驱动、从CF/IDE驱动到各种嵌入式文件系统、从LCD/VGA驱动到音频驱动、从IAR到ADS再到GCC、Ucos到linux、从I2C总线到SPI再到SSC以及TCP/IP协议。
但感觉并没有学到什么东西,就一个字:
累!
老实说这些项目,很少有驱动是自己动手写的,基本都是找来相近的代码改过来的。
有时候感觉自己现在做什么都是半桶水,对自己超没信心了。
对linux也是一知半解,对启动脚本,系统配制,shell、makefile以及应用程序编程,都了解一点点但没有一样精通的;工作主要使用C语言,可是有时候写个测试程序也是一堆错误;英语自感觉还不错,但是有时候看datasheet也会发懵!
生活艰难,工资又低,想提升自己却又谜茫不已。
大牛建议:
1) 为了今后的发展,你除了考虑广度以外,更重要的是注意知识的深度。
譬如,做过网络驱动,那么是不是只停留在会写驱动的表层上,有没有对Linux内核的网络结构,TCP/IP协议作过深入的了解。
2) 在Linux下开发很多时候都要利用现成的东西,没必要什么都自己搞。关键是变成自己的驱动后是否了解原作者编写时背后的一些东西。你应该不止是简单的让它工作。写驱动的时候就要考虑它的性能问题,并给出测试的方法(当然可以利用现成的许多工具,譬如测试网络性能的netperf等)。
当你写过Flash驱动,可能会知道Flash的性能有时候有多重要。
3) C程序的自我修炼,是否考虑到软件工程方面的一些东西,程序的可维护性和扩展性,譬如LCD驱动,是不是从Sharp到NEC的只需要集中修改很少的几个地方?
对于不同品牌的Flash,如果使得Flash的驱动做的更具有灵活性。
4) 如果有时间结余,可以关注Linux内核的发展。譬如LCD的驱动有没有考虑到V4L2通用架构,譬如网络驱动用到了NAPI了吗?当然在此之前,假设已经对LDD3, ULK2理解的比较熟了。
5) 现在所作的这些驱动还算不得非常核心的东西。如果你想有更好的发展,可以考虑往audio,video,net方面发展,你应该多注意真个行业需要什么样的人才,上述每一项都需要很厚的底蕴,譬如video,需要了解MPEG4, H264等,怎么也要个1到2年才能算个入行阿,所以我建议不要只顾闷头做东西,要适当关注目前的一些应用。
6) 对硬件知识的补给,做嵌入式Linux这一行不可能不读硬件的Spec,如果你对硬件的工作机制理解的比较透,会有助你写出性能好的驱动程序。
顺便提一点,适时的提高你的英语水平,对你的职业生涯绝对有帮助。(不要等需要的时候再补,来不及)
7) 如果有时间,平时注意对Linux应用程序编写的了解/积累,也将有助于你写出很好功能很好的驱动程序。
8) 永远不能以为自己做了很多东西,就驱动而言,像TVIN/TVOUT, USB, SDIO等等,好多未知领域呢。在问题还没有解决之前很难说清是哪里不对了。
有时候是datasheet里面的一句话没有注意,还有好几次调不出来最后查到是PCB的问题,所以有时候特别晕。
此外,其实如这位网友做的这些东西,在不懂的人看来,好像很高深,不能逾越,但是任何东西都一样,你要不断的进步,第一次做某个驱动和第二次再做这个驱动,你应该获得更多,如果你没有这种感觉,那你就是白做了。
比如,你第一次写Linux驱动和你第十次写linux驱动,你应该有不同的感觉,更甚者,也许你有了一套很好的框架,无论任何驱动,你只要套用框架,然后针对不同的datasheet做点修改就可以了。
如果你能自己总结这些框架并把它分享给大家,那么你的价值又高了不少。
你在做驱动的时候,肯定会用到与内核相关的东西,或者需要和内核中的某些模块配合,这样你也要理解内核的某些部分是如何实现的,最后,你应该可以很好的掌握linux的内核整体框架是什么。
这些都是进步,都是在你一次又一次的开发中需要总结的东西,如果你不总结,永远都是从头开始(或者说永远都是还没看懂别人代码为什么这么做的时候,就去改它,然后可以工作了),就完事了,这样你永远也不可能提高,最后你就有了现在的这种感觉,觉得自己什么都不是,什么都不懂。
还有一点要说明的,现在有许多人搞linux开发,却不去用linux系统做为自己工作的平台,在这种情况下,你很难理解linux内核的实现机制,以及为什么要采用这种方式实现。
你都没用过linux系统,就想去实现一个与linux运行机理相符合的项目,这是不可能的。就是你这个项目成功了,它也肯定不是最优的,或者是不符合linux的使用习惯的(包括内核的扩展和应用程序的实现)。
所以,最后想说的是,你一定要定期总结,总结你这段时间做了什么,你从中得到了什么,为了你以后可以更好的做好类似的工作,你应该去看些其它的什么东西;二是你一定至少要在工作的开发环境中使用linux作为你的平时工作平台,而不要使用虚拟机和服务期,因为你只有完全了解了linux的使用,你才可以为它开发符合它规则的项目。
-
嵌入式
+关注
关注
5186文章
20153浏览量
328940 -
Linux
+关注
关注
88文章
11628浏览量
217991 -
应用程序
+关注
关注
38文章
3342浏览量
59929
原文标题:搞嵌入式驱动开发一年多了,感触颇多......
文章出处:【微信号:EngicoolArabic,微信公众号:电子工程技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
电机驱动和舵机驱动?
请问USB2CAN驱动程序在哪里?
从驱动到应用:RT-Thread环境下的SDIO开发指南
6轴步进电机驱动+STM32F767+485+CAN+网口+12输入输出原理图
Profinet转CAN网关模块对实现西门子PLC与CAN变频器协同通信的助力研究


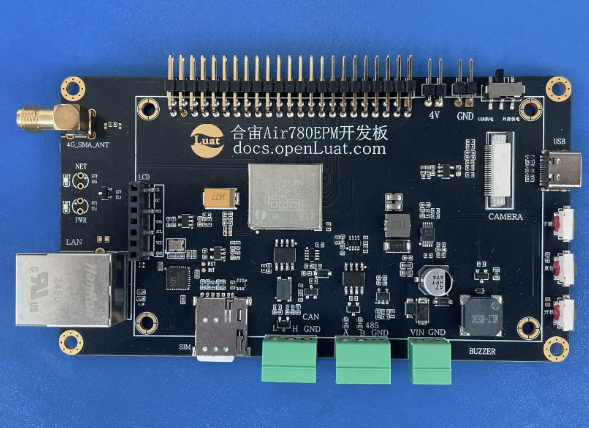
深度解析Air780EPM模组:LuatOS下CAN总线通信的完整方案!
爱立信如何构建意图驱动型自主网络

使用Mickledore生成BSP,移动到最新版本的Scarthgap v6.6.52时,驱动程序未构建,怎么解决?
使用CAN以及CANIF配置了S32K310的CAN驱动模块,如何进行报文的接收呢?
CAN总线故障排查:从问题到解决的实战案例

探索 CAN 转 PN 网关连接 can 设备的精准配置之道






 工商网监
工商网监
评论