 KUKA程序中"DEF "与" DEFFCT" 的区别
KUKA程序中"DEF "与" DEFFCT" 的区别

程序/子程序DEF
在SRC声明程序使用DEF
生成的DAT 文件使用DEFDAT
SRC 文件中最多可由 255 个局部子程序组成
局部子程序允许多次调用
局部程序名称需要使用括号
运行完毕局部子程序后,跳回到调出子程序后面的第一个指令
最多可相互嵌人 20 个子程序
函数编程DEFFCT
函数是一种向主程序返回某一值的子程序。
通常需要输入一定的值才能计算返回值。
在函数头中会规定返回到主程序中的数据类型。
待传递的值通过指令 RETURN (return_value) 传递。
有局部和全局函数两种。
函数的句法:
DEFFCT DATATYPENAME_FUNCTION( )
例子:
DEFFCTINT SetDlgMsg() 声明一条函数
……
Return(nAnswer) 发出返回值
指令RETURN(return_value) 必须在指令 ENDFCT 之前。
;
ENDFCT 函数结束
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
编程
+关注
关注
90文章
3725浏览量
97527 -
子程序
+关注
关注
0文章
33浏览量
11567 -
KUKA
+关注
关注
3文章
218浏览量
17532
原文标题:KUKA程序中"DEF "与" DEFFCT" 的区别
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
虹科工程机械诊断 | CAN总线J1939协议译码与分析:Manitou DEF 液位传感器
点击蓝字,关注我们01故障现象一台Manitou工程机械,客户反馈DEF(柴油机尾气处理液)油箱即使加注到无法再加的状态,设备仍显示DEF液位为空,系统中还存有故障代码。由于这个DEF

SMT加工中,双面板与四层板的区别,你知道几个?
23年PCBA一站式行业经验PCBA加工厂家今天为大家讲讲SMT加工中双面板与四层板有什么区别?SMT加工中双面板与四层板的区别。在SMT加工中
单片机引脚中的VCC和VDD有什么区别
。本文将介绍VCC和VDD的区别及其在单片机中的应用。
VCC
VCC(Voltage at the Common Collector)是指芯片的电源电压,通常是5V或3.3V,用于为芯片提供工作电压
发表于 12-16 06:19
音响中软件分频和硬件分频区别解析以及对音质和成本的影响
要理解蓝牙音响中 软件分频 与 硬件分频 的区别,需先明确 “分频” 的核心目的:将音频信号(20Hz-20kHz)拆分为不同频段(如低频、中频、高频),分别驱动对应频段的喇叭单元
LVGL v9.2.2 官方原版的 lv_symbol_def.h 和 lv_symbol_def.c 完整代码
以下是 LVGL v9.2.2 官方原版的 lv_symbol_def.h 和 lv_symbol_def.c 完整代码(无删减、保留所有官方注释和符号定义,与源码完全一致):
一
发表于 11-14 07:57
EtherCAT转PROFINET网关:助力KUKA机器人实现“焊”装自由!
EtherCAT转PROFINET网关:助力KUKA机器人实现“焊”装自由! 在追求极致效率与精度的现代汽车焊装车间,实现车身总拼、地板总成、四门两盖等核心工序的100%自动化,已成为衡量制造水平
程序线性补偿和传感器本身硬件补偿有什么区别?
程序线性补偿和传感器硬件补偿,涉及到传感器信号处理的两种核心思路。我们来详细拆解一下它们的区别。简单来说:传感器本身硬件补偿:是在物理层面,通过额外的硬件元件或专用芯片,直接在传感器内部或电路板上

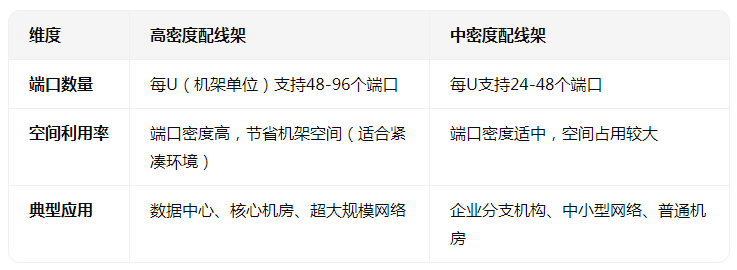
高密度配线架和中密度的区别有哪些
高密度配线架和中密度配线架的核心区别在于端口密度、空间利用率、应用场景及管理效率,具体对比如下: 一、核心区别:端口密度与空间占用 示例: 高密度配线架:1U高度可容纳96个LC双工光纤端口(48芯
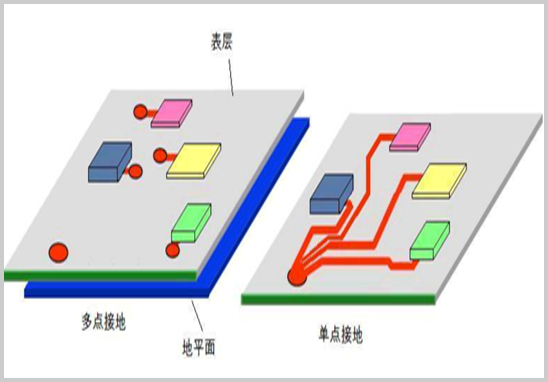
PCB设计中单点接地与多点接地的区别与设计要点
一站式PCBA加工厂家今天为大家讲讲PCB设计中的单点接地与多点接地有什么区别?单点接地与多点接地区别与设计要点。在PCB设计中,接地系统的设计是影响电路性能的关键因素之一。单点接地和
PLC中Static和Temp变量的区别
大家好,收到粉丝投稿,让博主讲下Static变量和Temp变量的区别,新入行的兄弟可能会对这两个概念不太能理解。

关于有源蜂鸣器及无源蜂鸣器的区别及驱动各类单片机案例
本文主要介绍了有源无源蜂鸣器的本质区别,引脚判断和对应的驱动程序,对我们选用蜂鸣器元件指引了方向

【原创】labview布尔控件机械动作中单击时转换和其它值变化的区别以及实际场景应用
”的布尔控件可以创建局部变量存储状其态,其它的5种机械动作都不可以创建局部变量。
3、在事件结构中观察本质区别:
“单击时转换“ 触发事件后,程序在事件结构中扫描到布尔控件时读取其状态,用于其后的流程
发表于 07-02 18:05
高密度配线架和中密度的区别
高密度配线架与中密度配线架的核心区别体现在端口密度、空间利用率、应用场景适配性、成本结构及扩展能力等方面,以下为具体分析: 一、端口密度与空间利用率 高密度配线架 端口密度:每单位空间(如1U机架



评论