 dfrobotDF9GMS 360度微型舵机简介
dfrobotDF9GMS 360度微型舵机简介

简介
DF9GMS是一款360度微型舵机。舵机内部采用塑料齿轮传动,轻便小巧。可用于各类应用及DIY制作中,诸如小车,船,风车等等。
360°舵机区别于一般普通舵机的点在于它取消了内部的硬件限位。只能够控制舵机的旋转方向和旋转速度,不能控制旋转角度。所以功能上更趋向于自带电机驱动的电机,可以控制正反转,停止。相对于普通直流电机,360度舵机不需要额外的电机驱动组件,即插即用,小巧方便,Arduino的控制方式与普通舵机相同。舵机工作在4.8~6V电源上时,扭矩可到1.2~1.6Kg*cm。
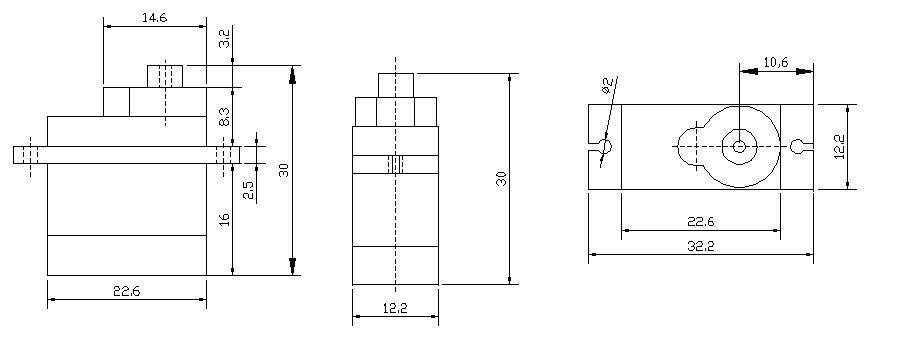
TowerPro SG90C尺寸图
注意事项:
360°舵机只能控制旋转方向,不能控制旋转角度。如需要普通舵机,请选择DMS-MG90 金属9g舵机(1.8Kg)。
特性
360°连续旋转
正反转控制
技术规格
工作电压:3.5 - 6.0V
供电电压:4.8V~6.0V
死区宽度:5usec
工作速度:0.12sec / 60°(4.8V空载)
堵转转矩:1.2kg / cm(4.8V),1.6kg / cm(6.0V)
中立位置:1500us
接口说明: 棕色:GND
红色:VCC
橙色:信号线
连接线长度:250mm
工作温度:-30°C - + 60°C
产品尺寸:22.6*12.2*30 mm
重量:9±1g
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
嵌入式主板
+关注
关注
7文章
6107浏览量
36952 -
DFRobot
+关注
关注
4文章
1164浏览量
11932
发布评论请先 登录
相关推荐
热点推荐
舵机伺服编码器
舵机伺服编码器是用于实时检测舵机输出轴位置、速度或角度的核心反馈元件,它能将机械运动转化为电信号,让控制系统实现对舵机的精准闭环控制。 这个问题切得很准,它直接指向了舵机 “精准控制”
PWM信号是如何控制舵机的?
PWM(脉冲宽度调制)信号控制舵机的核心原理是通过固定周期内高电平的持续时间(脉宽)对应舵机的旋转角度,舵机内部电路根据检测到的脉宽驱动电机转动到目标位置并保持。以下是具体实现过程: 一、核心控制
电动舵机和直线舵机的区别?
,输出旋转运动。通常转动角度范围有限(常见 0°-180°,部分可达 360° 连续旋转),例如 1.5ms 的 PWM 脉冲信号对应 90° 中位位置,电机带动输出轴转动到指定角度后保持静止,即使受外力也能通过闭环反馈维持位置。 直线舵机 :本质是
工业大舵机和普通舵机的区别?
工业大舵机和普通舵机在设计定位、性能参数、应用场景等多方面存在显著差异,以下是具体对比: 核心性能参数 精度控制 工业大舵机 :配备高精度位置传感器(如磁阻式绝对值编码器),精度可达 0.1
无刷舵机与普通舵机等舵机有哪些区别
无刷舵机与普通舵机主要有以下区别: 结构原理 无刷舵机 :由电动机主体和驱动器组成,无刷电机的定子为线圈绕组,转子为永磁钢体,通过霍尔传感器检测转子位置,利用集成驱动电路实现电子换向,使电流依序流经
什么是舵机?舵机的种类有哪些?
角度、速度或直线位置,无需额外搭建复杂控制电路,即可实现 “可控、稳定、高精度” 的动作,广泛用于需要精细运动控制的场景。 一、舵机的核心原理与结构 舵机本质是 “微型一体化运动控制系统”,其精准性源于 闭环控制逻辑 ,内部核心
舵机PWM信号介绍!
舵机 PWM 信号介绍 PWM(Pulse Width Modulation,脉冲宽度调制)信号是舵机的核心控制方式,其通过脉冲的宽度变化来精确指令舵机输出轴的旋转角度。以下从信号特性、参数标准
舵机的种类有哪些?
舵机是一种通过控制信号实现精确角度定位的驱动装置,广泛应用于机器人、无人机、航模、智能家居等领域。根据不同的分类标准,舵机的种类可以分为以下几类: 一、按驱动方式分类 这是最常见的分类方式,主要
舵机的执行原理
实现 360° 连续旋转),并具备一定的输出扭矩以驱动负载。 一、舵机的基本结构 舵机的核心结构由以下几个关键部分组成,各部分协同工作实现精确的角度控制: 1. 直流电动机 提供基础动力,通过齿轮减速后驱动输出轴旋转。 通常采用
舵机怎么控制正反,舵机怎么使用?
一、舵机怎么控制正反? 舵机的 “正反” 本质是 旋转方向的控制 ,但其方向逻辑与直流电机不同(并非通过电源正负极切换),而是通过 目标角度与当前角度的偏差 由内部电路自动控制。以下是具体
舵机如何控制?
舵机是一种高精度的角度控制执行器,广泛应用于机器人、遥控模型、自动化设备等场景。其控制核心是通过 PWM(脉冲宽度调制)信号 调节角度,配合内部闭环反馈实现精准定位。以下从原理、控制方式、关键参数
【嘉楠堪智K230开发板试用体验】01 Studio K230开发板Test1——舵机控制
, enable=True) # 在同一语句下创建和配置PWM
\'\'\'
\'\'\'
说明:舵机控制函数
功能:180度舵机:angle:-90至90 表示相应的角度
360连
发表于 07-10 09:07
舵机精准定位背后的秘密
从精密的机器人关节到广阔的工业生产线,从灵活的无人机飞行到精细的医疗手术器械,舵机的身影无处不在,默默推动着自动化技术的飞速发展。那么,舵机究竟是如何实现其精准定位的呢?这背后隐藏着怎样的技术秘密
舵机的类型及其特点
舵机,也称为伺服电机,是一种能够将输入信号转换为精确角度或位置输出的电机。它们广泛应用于机器人、遥控模型、自动化设备等领域。 舵机的类型及其特点 1. 直流舵机(DC Servo Motor) 特点





 工商网监
工商网监
评论