 为什么激光SLAM能够成为现下主流?它又是如何实现快速发展?
为什么激光SLAM能够成为现下主流?它又是如何实现快速发展?

近年来,在家庭、餐厅、商场等服务场所,移动服务机器人已屡见不鲜,他们能做到自主清扫房间、送餐送物、智能引导等功能,自主定位导航作为移动服务机器人的核心技术之一,也是其完成复杂高级任务的基础,必然引起业内关注。
一直以来,实现移动机器人在未知环境中的自主导航能力,是机器人研究领域的一大核心课题,SLAM技术的出现彻底解决了机器人在未知环境中的自主移动问题。根据传感器的不同,目前SLAM技术主要包括了视觉SLAM与激光SLAM两大类,基于视觉的SLAM方案主要有两种实现路径,一种基于RGBD的深度摄像机,比如Kinect;还有一种是基于单目、双目或者鱼眼摄像头的。但目前视觉SLAM仍处于进一步研发和应用场景拓展、产品逐渐落地阶段。反观激光SLAM,由于起步较早,在理论、技术和产品落地上都较为成熟,凭借稳定、可靠、高性能等技术优势,激光SLAM已成为现下主流,并在机器人、无人驾驶领域得以广泛应用。
激光SLAM脱胎于早期的基于测距的定位方法(如超声和红外单点测距),激光雷达的出现和普及使得测量更快更准,信息也更为丰富。其采集到的物体信息呈现出一系列分散的、具有准确角度和距离信息的点,也被称为点云。通常,激光SLAM系统通过对不同时刻两片点云的匹配与比对,计算激光雷达相对运动的距离和姿态的改变,也就完成了对机器人自身的定位。
思岚科技是全球最早从事机器人自主定位导航技术的企业之一,目前,业务已辐射亚欧美洲20多个国家和地区,服务超过2000家企业和10万个人用户,旗下产品已成熟的应用于微软、壳牌、优必选、科大讯飞、软银等企业的服务机器人项目。
据了解,思岚科技主要利用自主研发的激光雷达作为核心传感器,通过SLAMWARE内置的先进算法驱动,可在未知环境中实时提供定位,并构建最高达5cm分辨率的环境地图。在实现定位与建图外,同时采用D*动态即时路径规划算法,可自动搜索前往目标的最短路径并控制机器人行动。
目前,思岚科技的自主定位导航方案已成为服务机器人领域性价比最高、稳定性更强的落地应用方案,经过多年的技术迭代与创新,思岚科技的SLAM技术已升级至3.0版本,相比传统SLAM技术,思岚科技的变革式SLAM 3.0采用了图优化的方式进行构图,能实现百万平米级别的实时地图构建能力,同时,拥有主动式回环闭合纠正能力,能很好的消除长时间运行导致的里程累计误差。
SLAM 3.0 采用SharpEdge精细化构图技术,可构建高精度、厘米级别的地图。同时,构建的地图规则、精细,进一步提升了定位的精确性。无需二次优化修饰,直接满足用户预期。相比较粒子滤波每次直接将传感器数据更新进入栅格地图进行增量式构建的做法,基于图优化的SLAM 3.0 摒弃固定的栅格地图,存储地图构建过程中调整了图结构中每个节点的pose和对应的传感器信息以及所有关键点构建的位姿关系图,利用全部的机器人位姿信息和对应传感器数据生成环境地图。
当机器人运动到已经探索过的原环境时,SLAM 3.0可依赖内部的拓扑图进行主动式的闭环检测。当发现了新的闭环信息后,SLAM 3.0使用Bundle Adjuestment(BA)等算法对原先的位姿拓扑地图进行修正(即进行图优化),从而能有效的进行闭环后地图的修正,实现更加可靠的环境建图。即使当时地图上看误差较大,SLAM 3.0也可灵活对已产生的地图进行调整。如今,思岚科技的自主定位导航套装及相应的机器人开发平台中,均采用了SLAM 3.0图优化,即使面对各类复杂的商用环境,机器人也能轻松应对。
发布评论请先 登录
激光膜切机:柔性材料精准膜切首选设备

AI Agent发展浪潮下,芯片级安全为何成为关键?主流芯片厂商如何布局?
TOF激光雷达在汽车避障上的应用

内孔堆焊激光熔覆修复加工:重塑工业修复的科技标杆
ROS2 SLAM建图与导航实战--基于米尔RK3576开发板
什么是激光雷达 3D SLAM技术?

激光焊锡技术在动力电池模组的应用
全新轻量级ViSTA-SLAM系统介绍

钙钛矿电池组件P1-P2-P3激光划刻工艺实现高效互联与死区最小化

远距MEMS/固态vsTOF近距方案,哪种会成为主流?

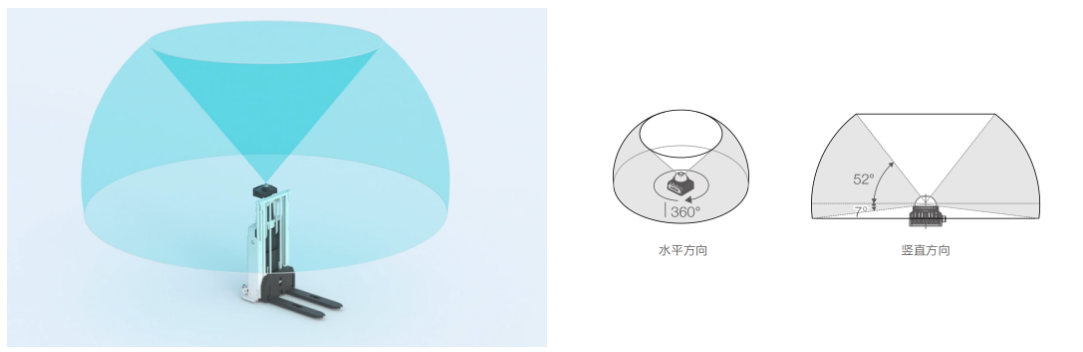
解析寻迹智行3D SLAM无人叉车的"智慧"从何而来?(本文纯干货)
UCL360系列毫米级架站式三维激光扫描仪的价值何在?
基于深度学习的增强版ORB-SLAM3详解

激光锡焊在CCS母排线中的应用
三维高斯泼溅大规模视觉SLAM系统解析




评论