 口袋步行机器人的制作图解
口袋步行机器人的制作图解

第1步:材料

像我的大多数项目一样,我使用了回收材料。如果找不到确切的答案,请尝试使用替代品:
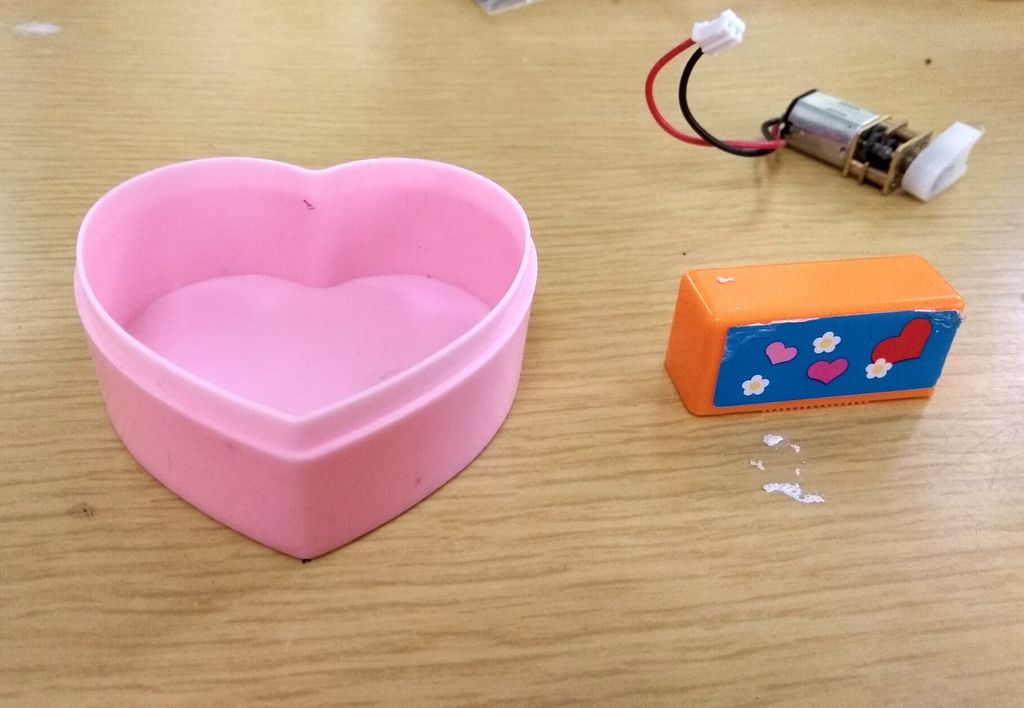
1 x塑料心脏:您可以从成千上万的产品中获取它,如铅笔刀,珠宝盒,玩具等。或者你可以3D打印你自己的。
带齿轮箱的1 x微型电机:你可以在3D笔中找到它,或者在线购买。
3 x 3D眼镜(你知道,就像你不应该从电影院拿走的。..。..)
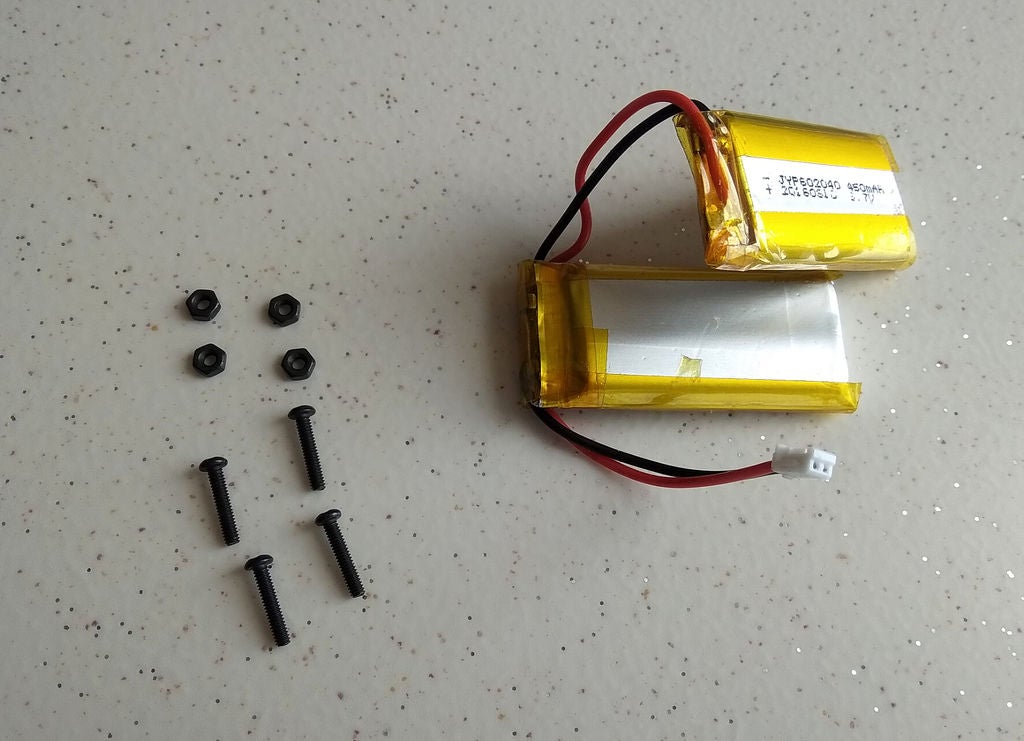
1 x 3.7V锂聚合物电池:来自破损的3Doodler 3D笔。
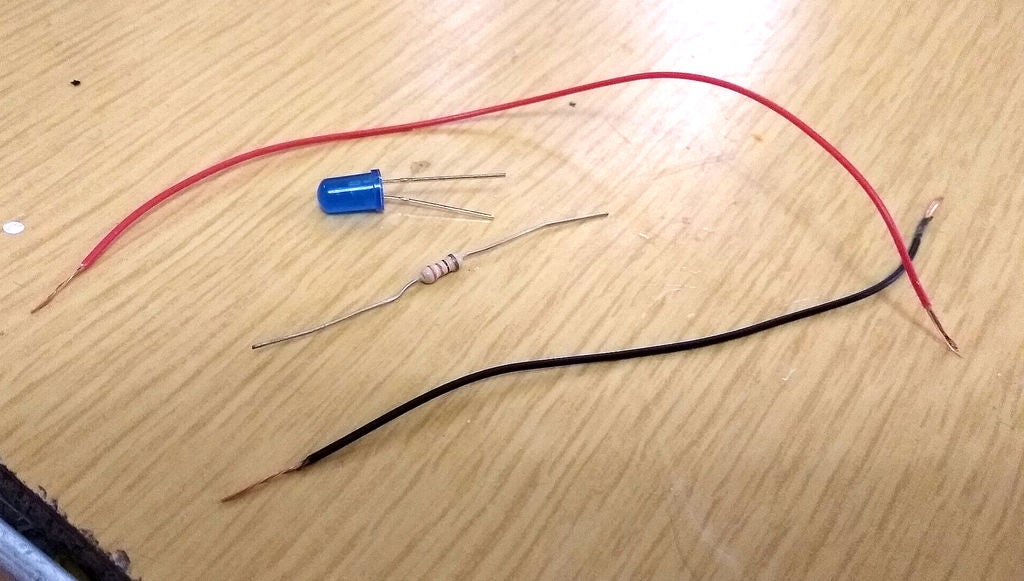
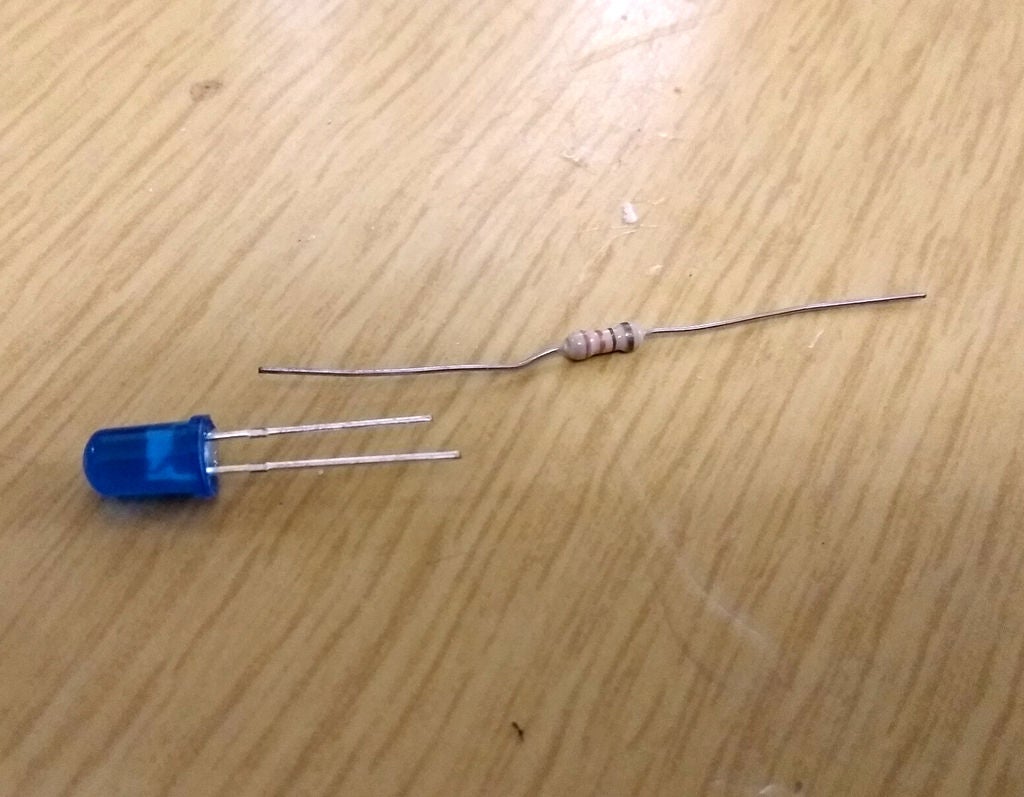
1x 330欧姆电阻(橙色/橙色/棕色/金色)
1 x LED
1 x开关
1个硬塑料件(白色):用于曲柄。我从破碎的打印机中得到了我的。
1个塑料小盒子(橙色):将微电机放在心脏里。我从玩具中得到了它。
1个塑料小棒(红色)。
2个长螺栓,带螺母和垫圈
带螺母的7个小螺栓:类似小型电子和机器人项目的螺栓。
电线:黑色和红色
焊锡
强力胶
此外,您将需要以下工具:
Dremel旋转工具
热风枪
烙铁
热胶枪
螺丝刀
钳子
此外,您可能需要为电池充电器。您可以在线找到它,也可以创建自己的。
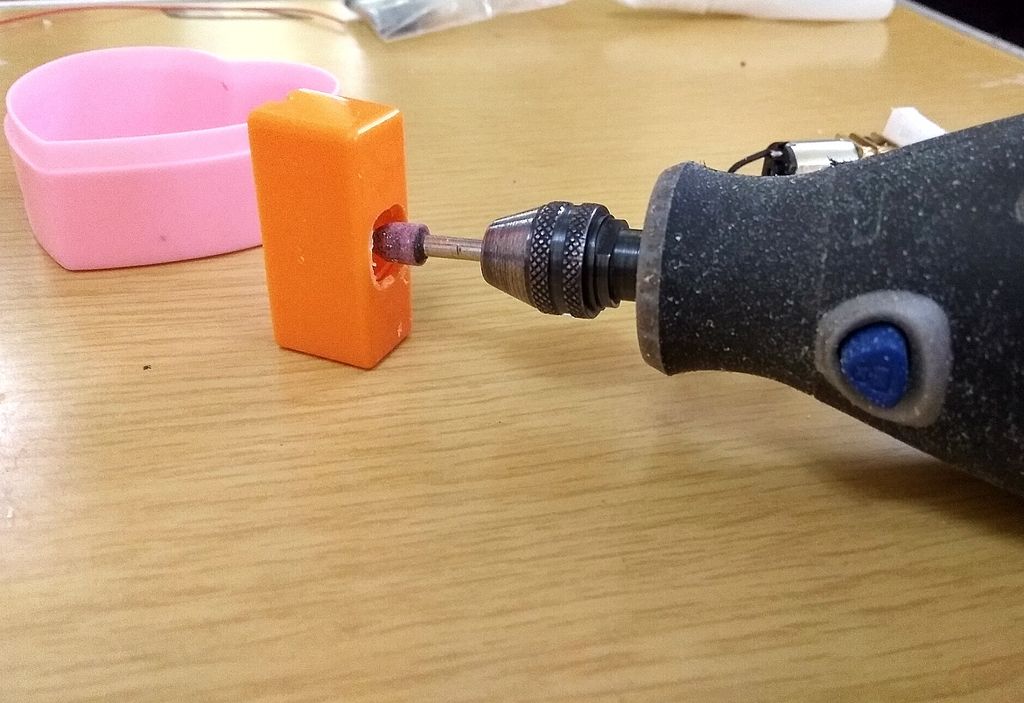
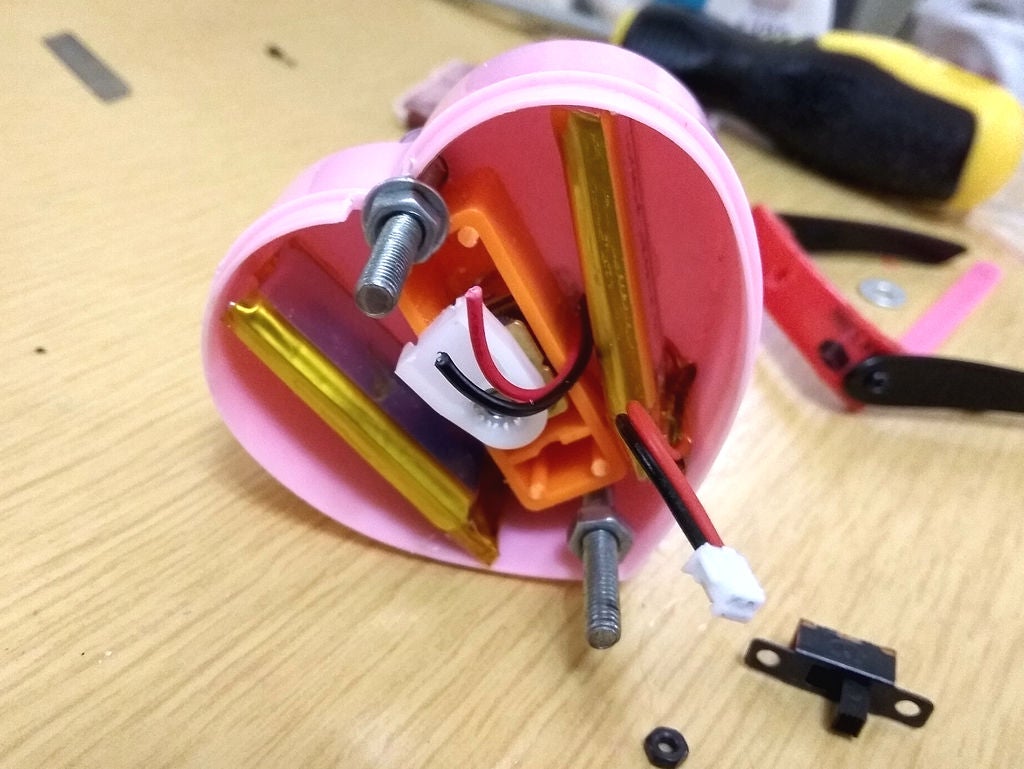
第2步:Crank


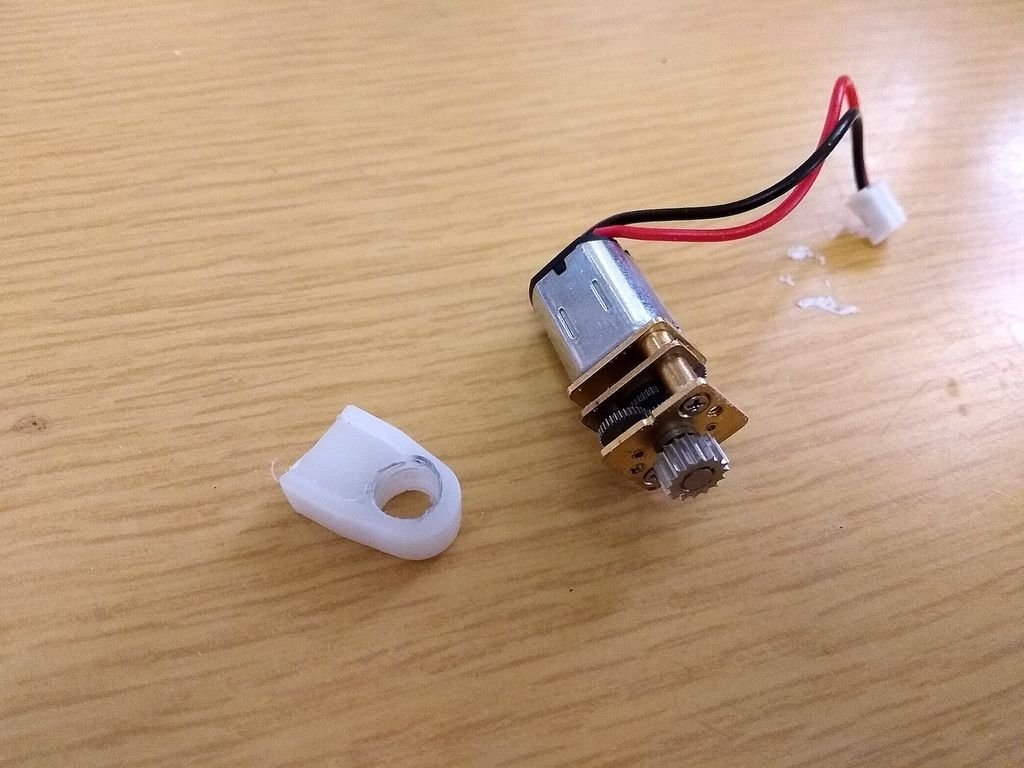
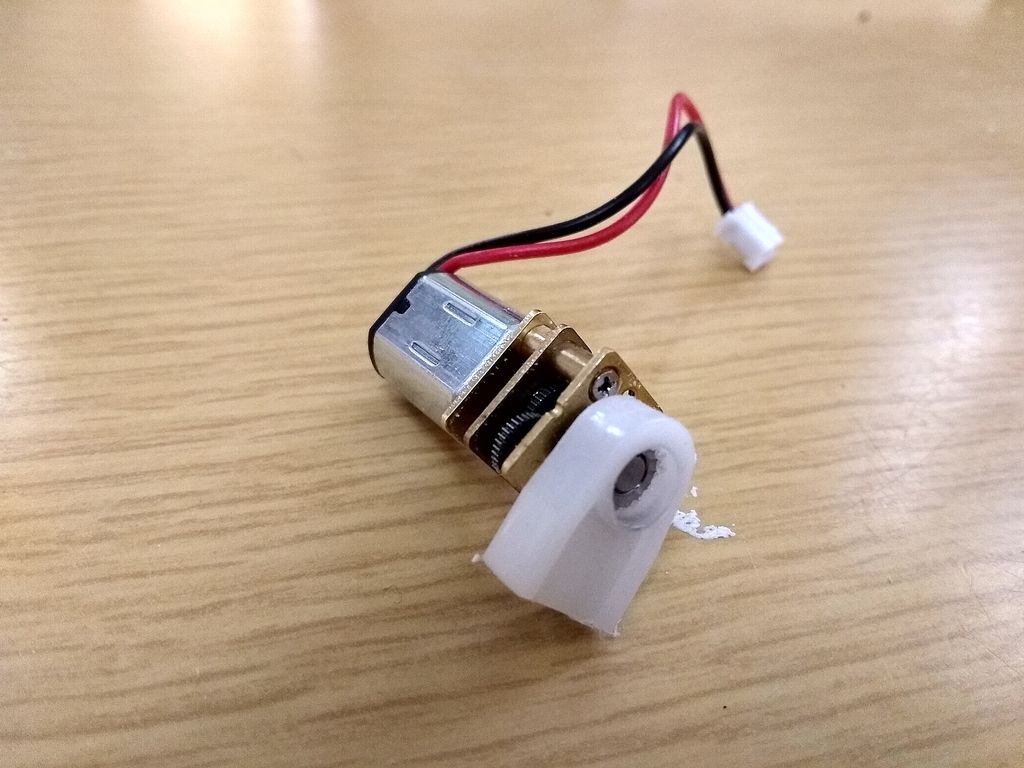
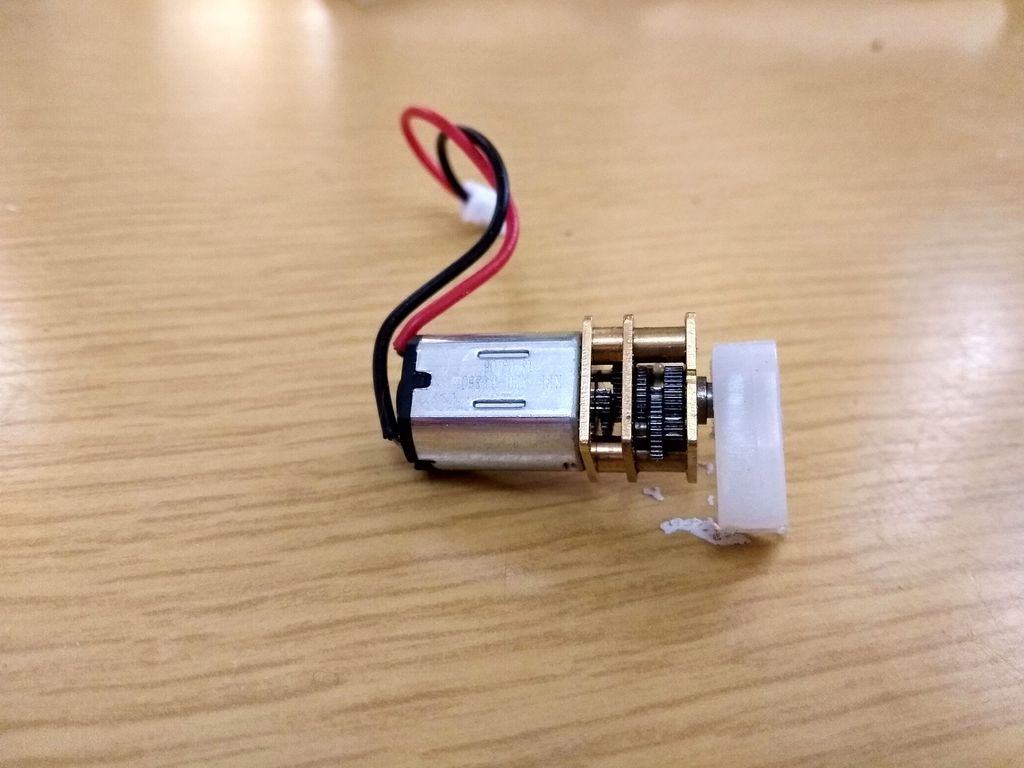
使用Dremel,我剪了一块塑料并将其改装成齿轮箱。它可以作为曲柄来移动机器人的腿。
第3步:心脏中心
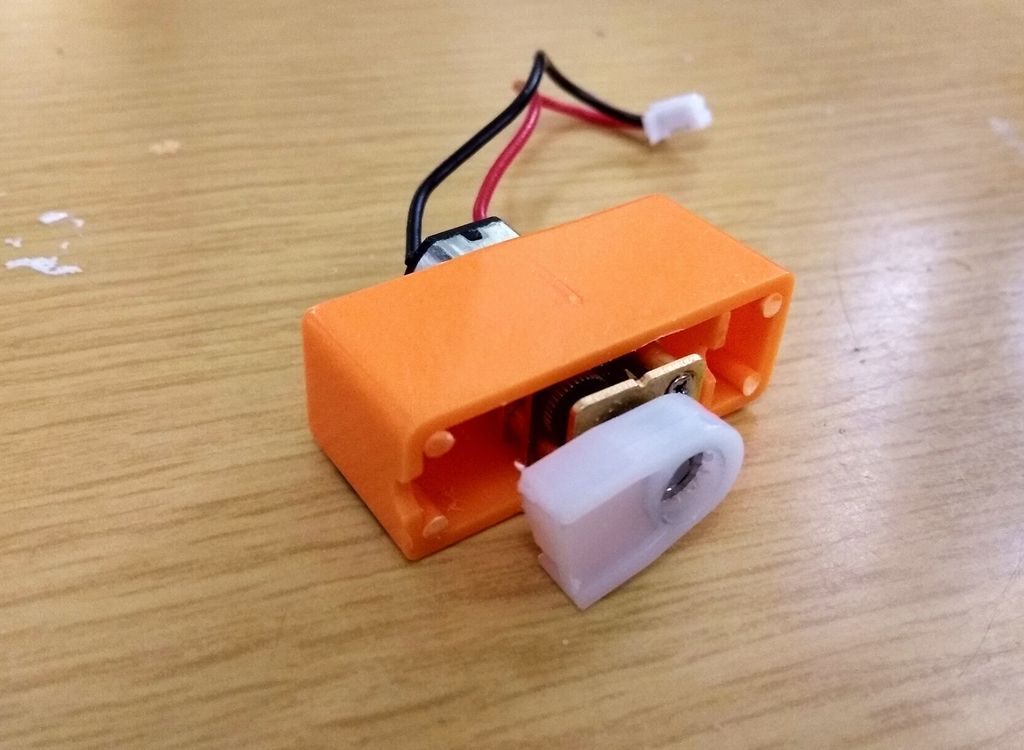

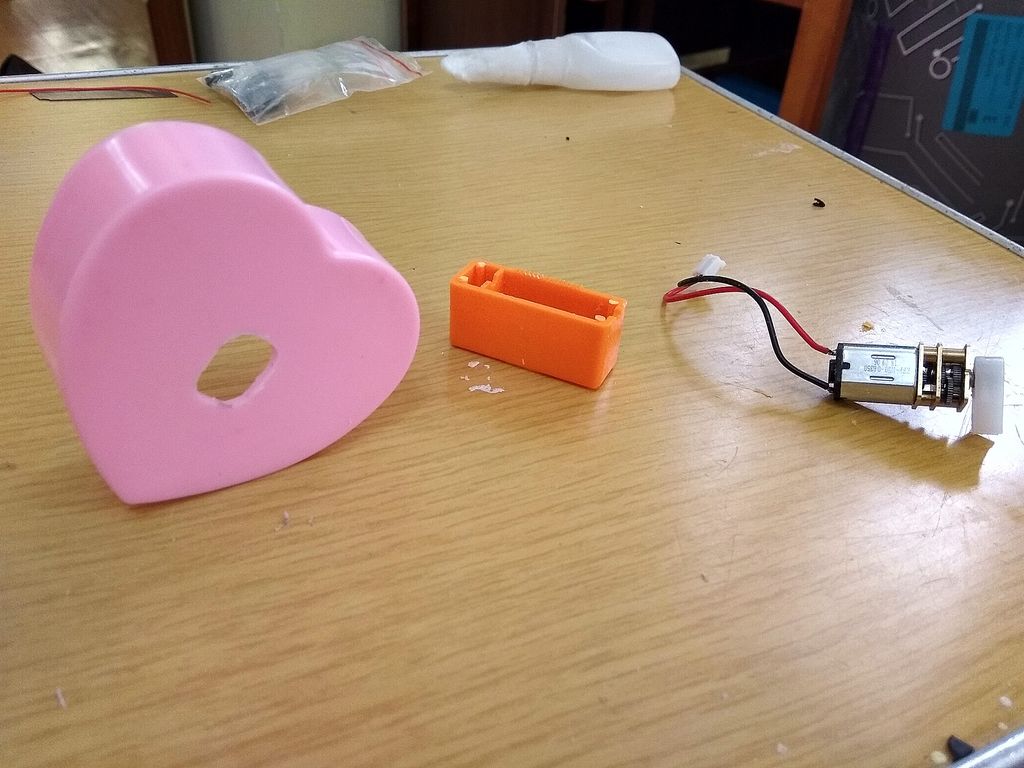

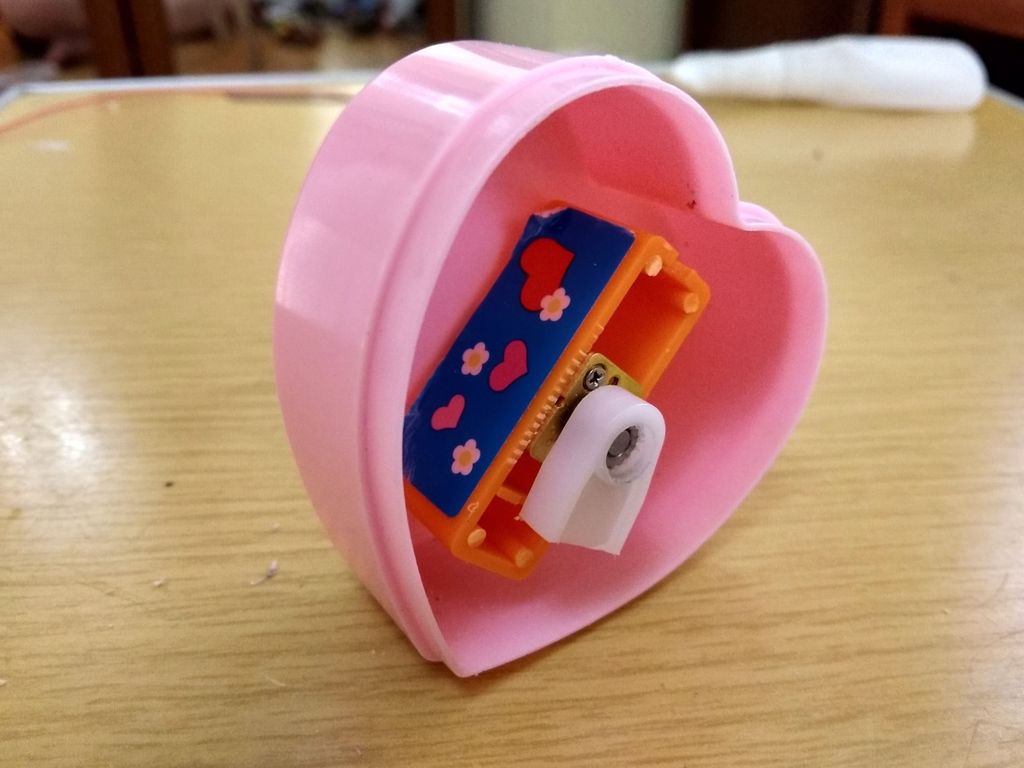
我在小塑料盒的中心和心脏中心钻孔。孔必须紧足以使电机保持在适当的位置。我添加了一些强力胶水来附着两个箱子,小心避免接触齿轮。然后我将这三件放在一起。
第4步:螺母,螺栓和垫圈
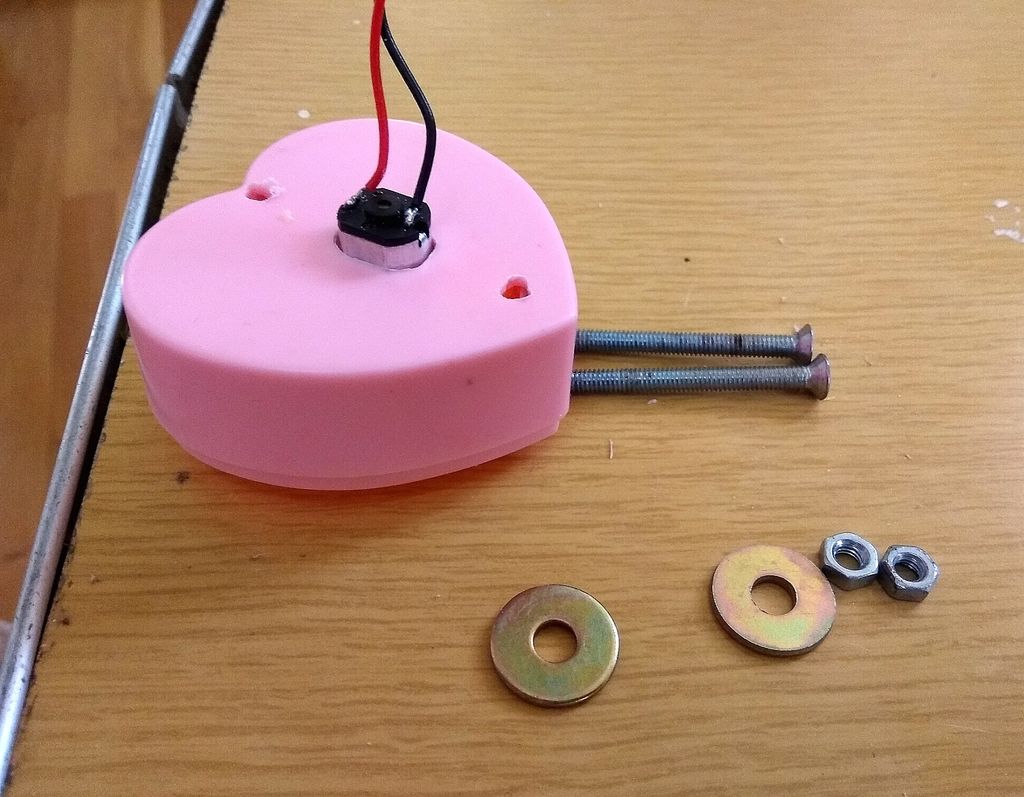

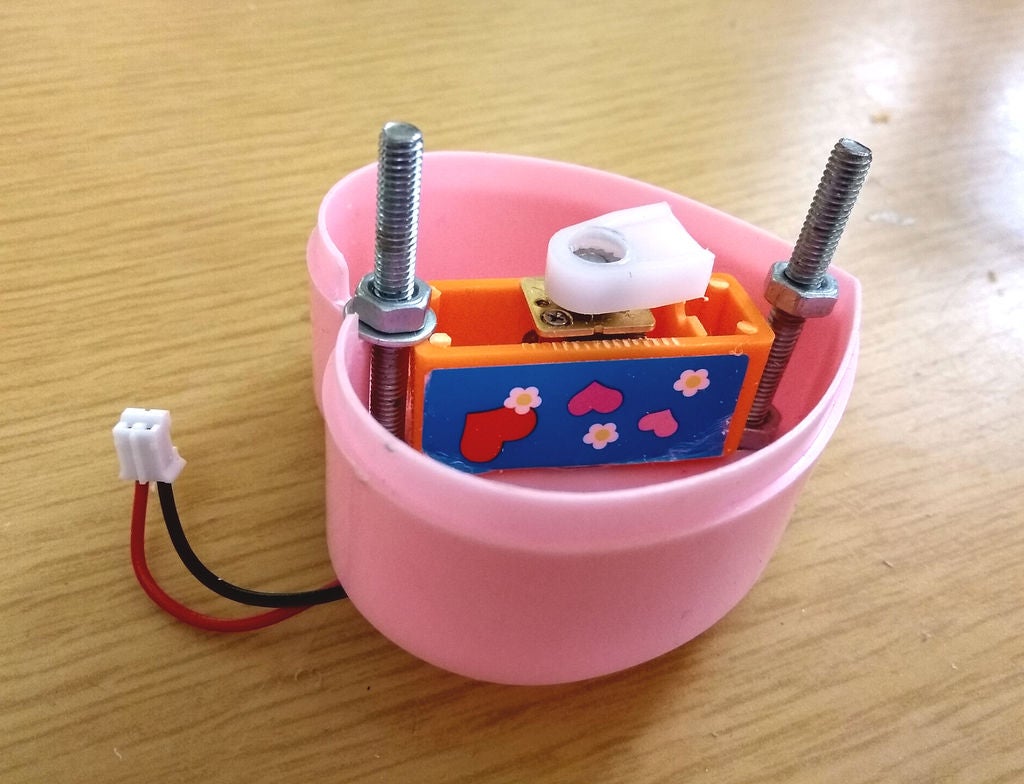
我在心脏钻了两个洞,一个在前面,一个在后面。我将长螺栓穿过它们,然后用垫圈和螺母牢固地固定它们。这些螺栓将成为支腿的轴。
之后,我在每个螺钉上再添加一个螺母,稍微低于曲柄水平。那些坚果会保持腿部到位。我添加了一滴强力胶以保持螺母的位置。
步骤5:电路
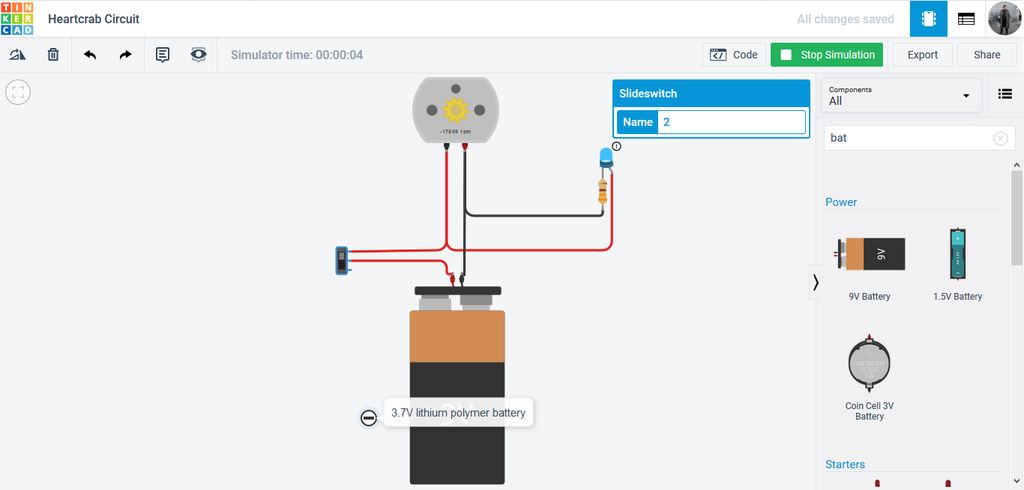
在这里你将找到机器人的基本电子原理图。它基本上是一个与LED并联的电机,带有一个330欧姆的电阻,以避免过充电,
我必须认识到我几乎每周都使用Tinkercad,但这是我第一次敢于使用电路设计师。真是太棒了!我只需要它来说明这个简单的电路(我曾经用手或PowerPoint幻灯片绘制它),但可能在不久的将来我会开始用这个工具玩更多。
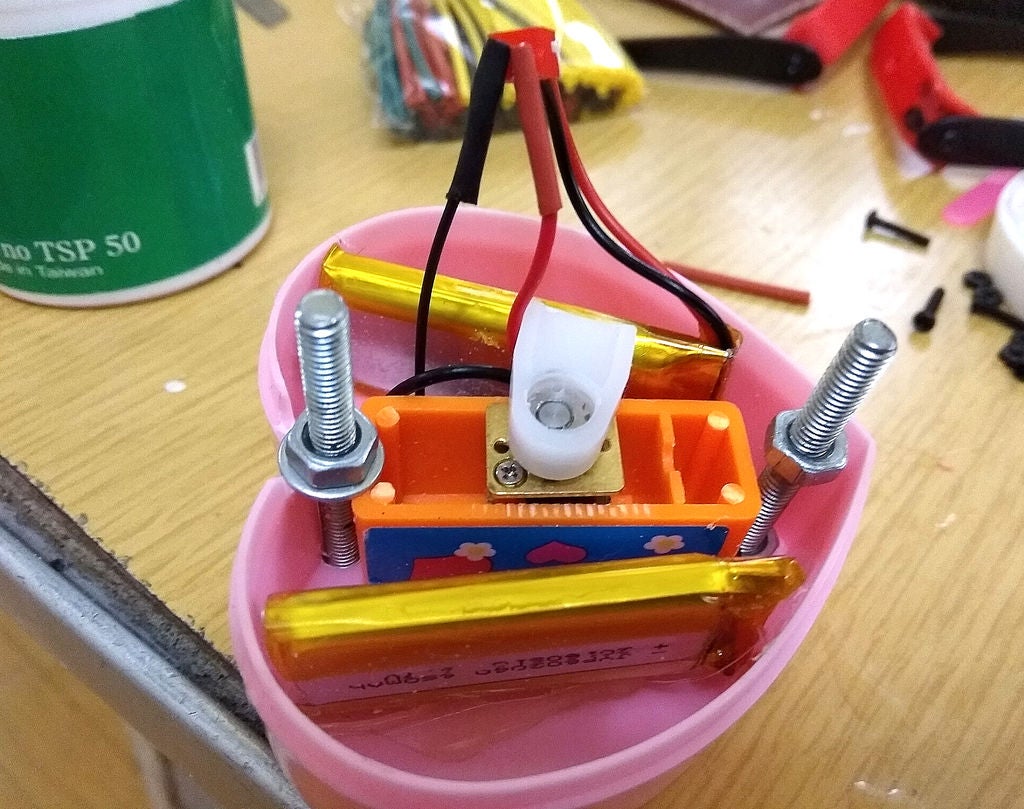
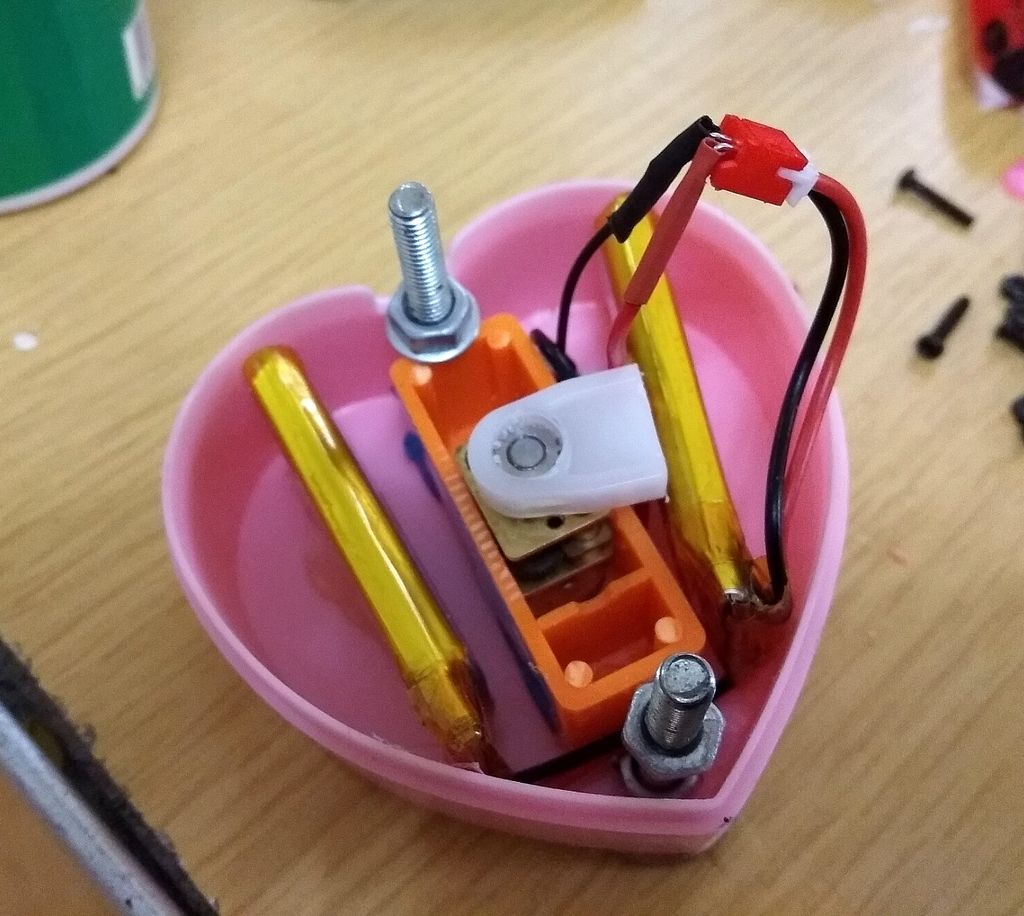
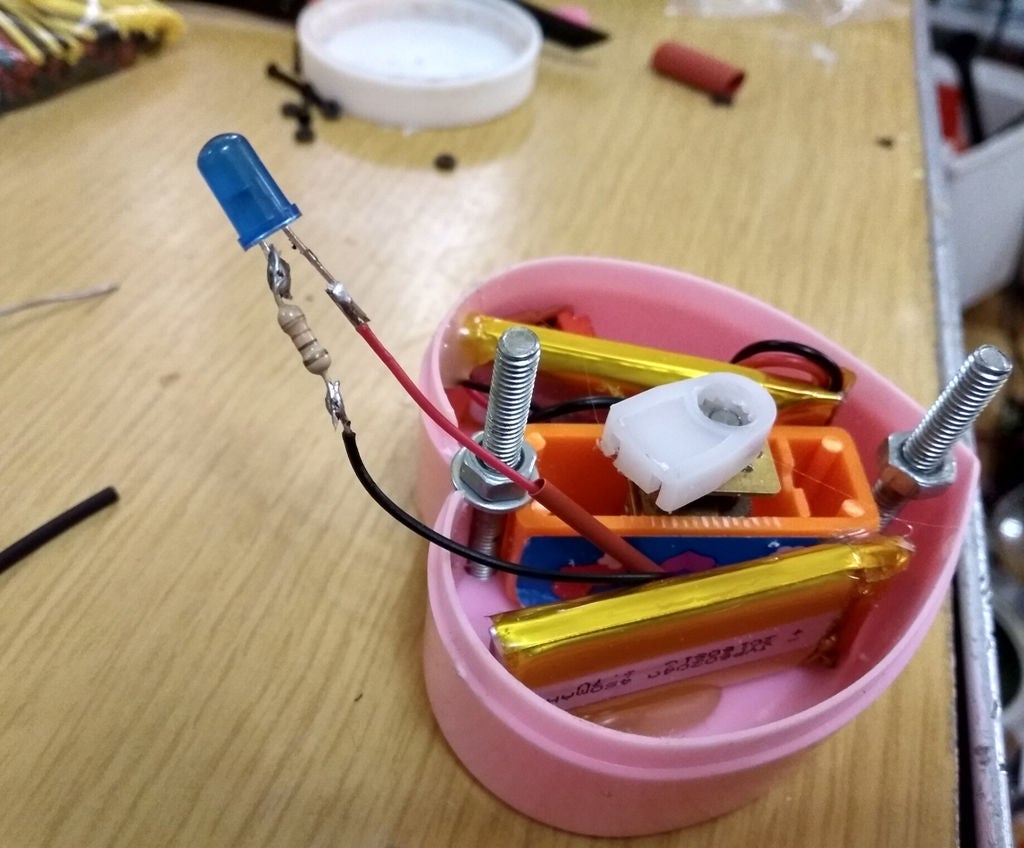
第6步:电池

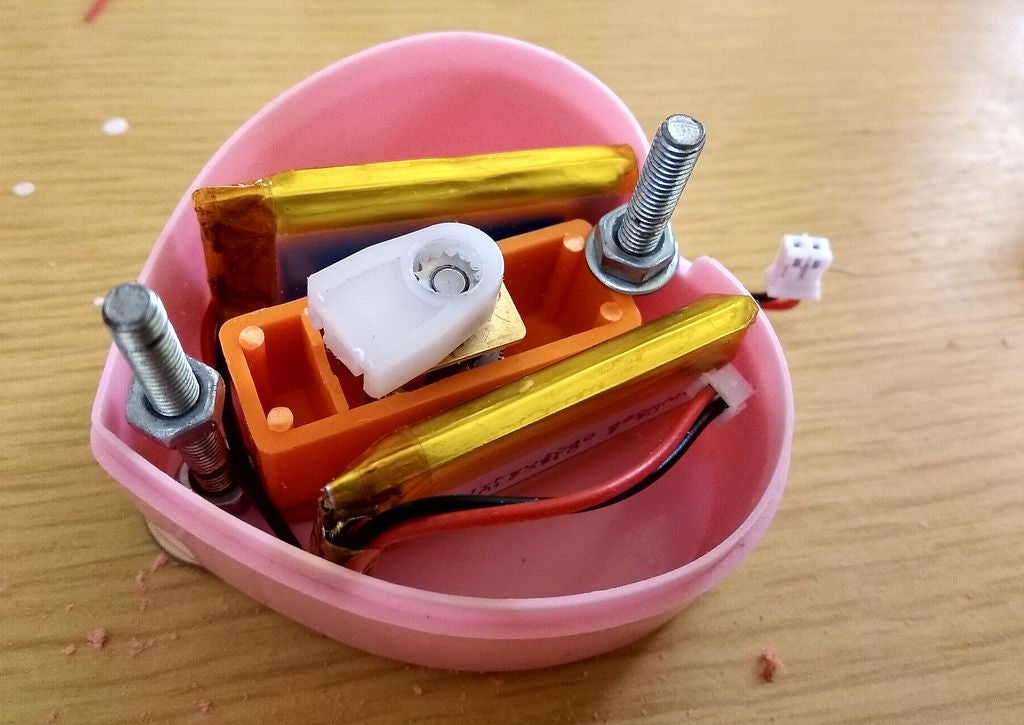
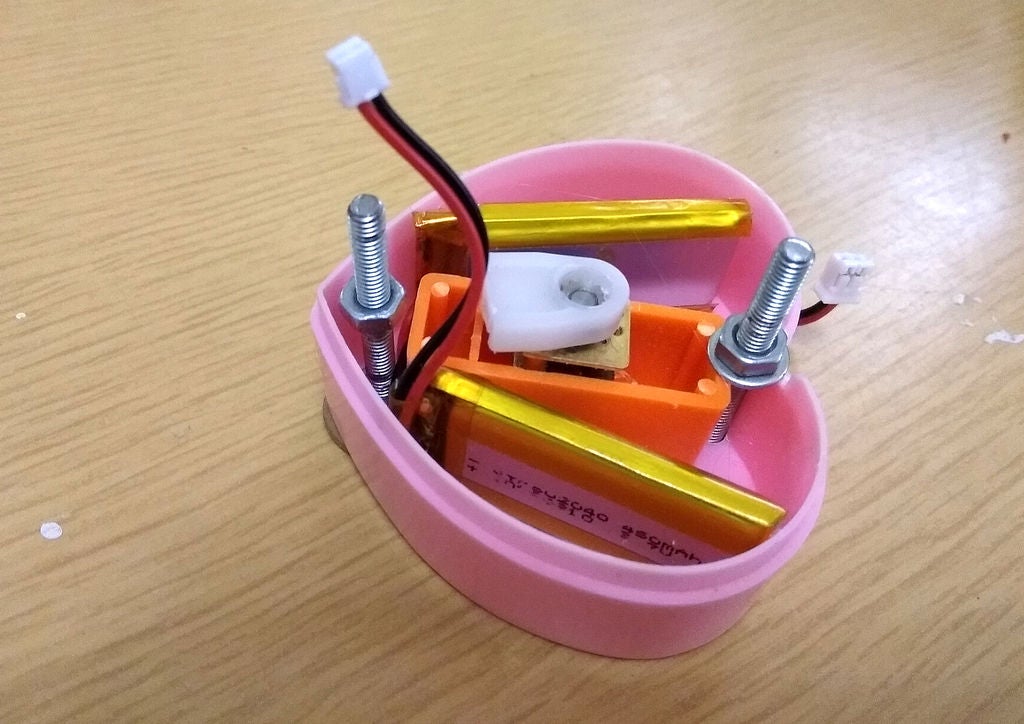
我破损的3D笔配有双电池电池。为了分配重量,我将每个包装放在心脏的两侧,将它们的连接电缆穿过橙色外壳和心脏之间的小空间。
在找到每个电池的最佳位置后,我使用了热胶将它们固定在心脏上。
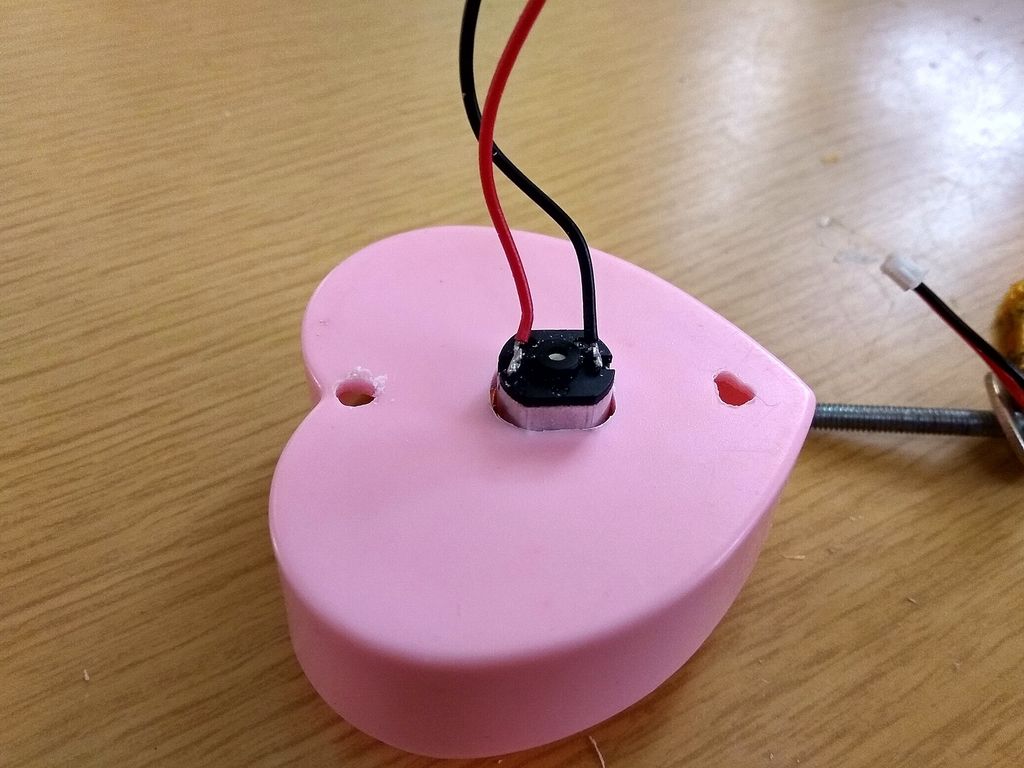
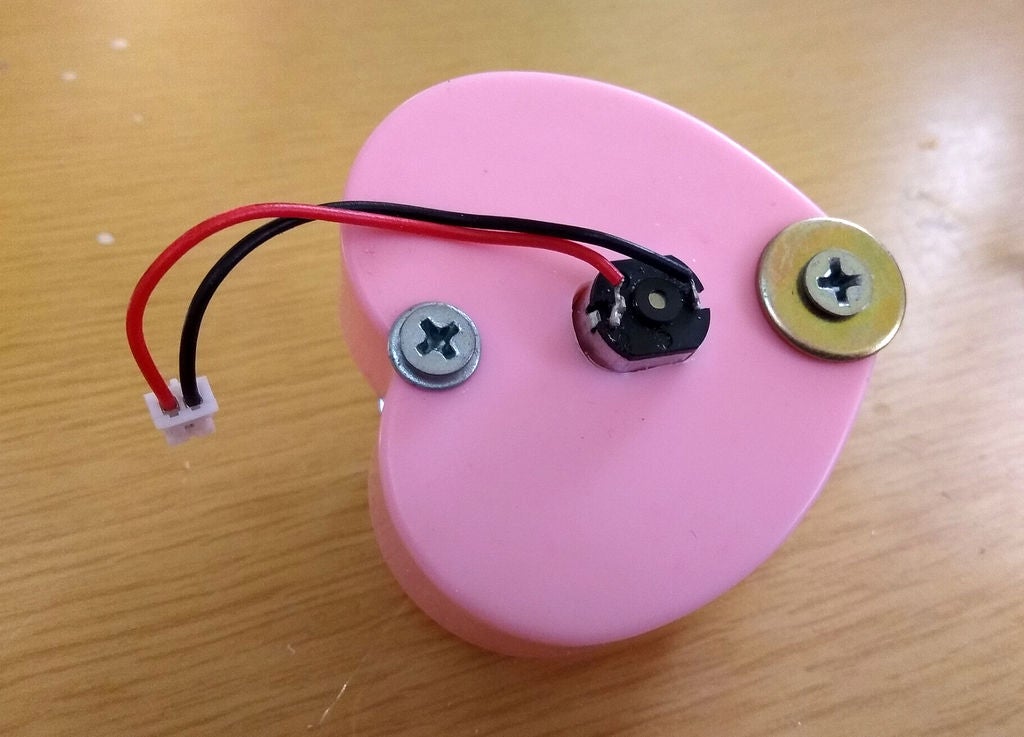
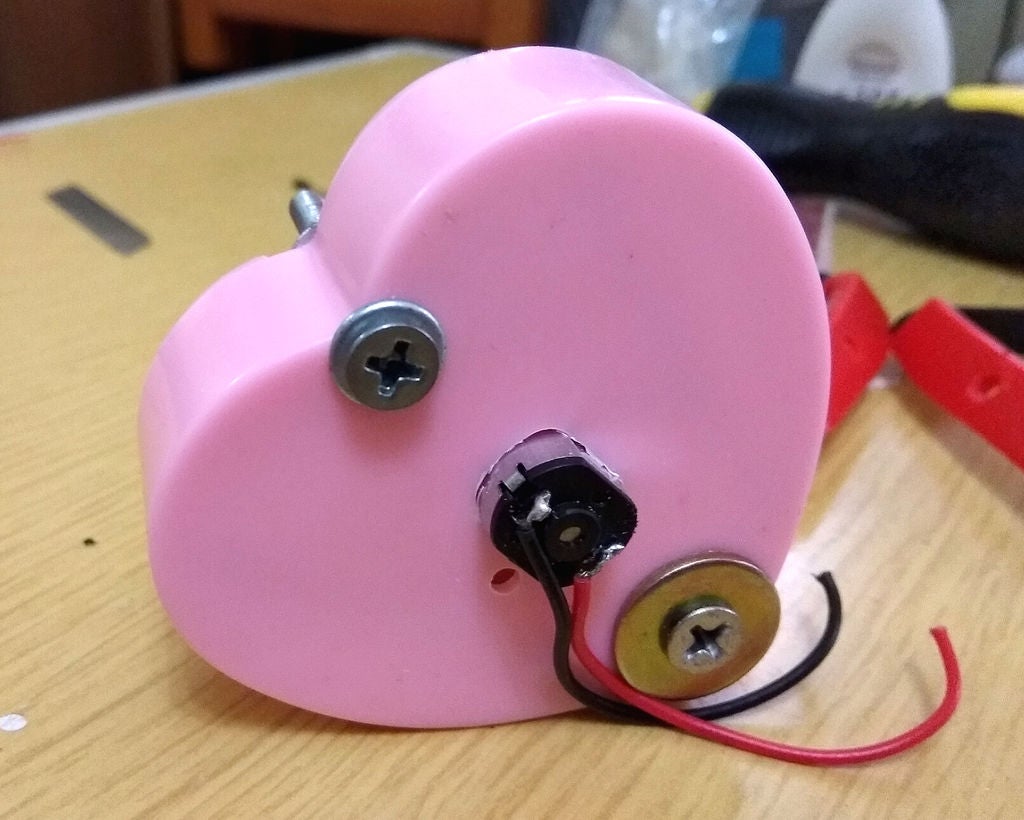
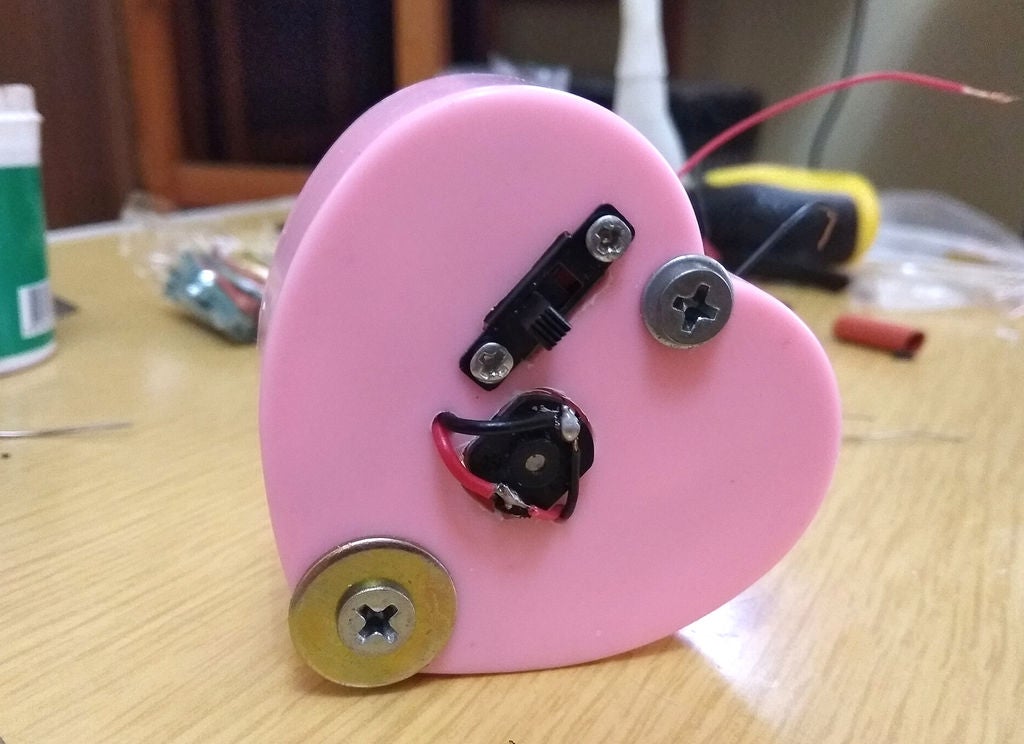
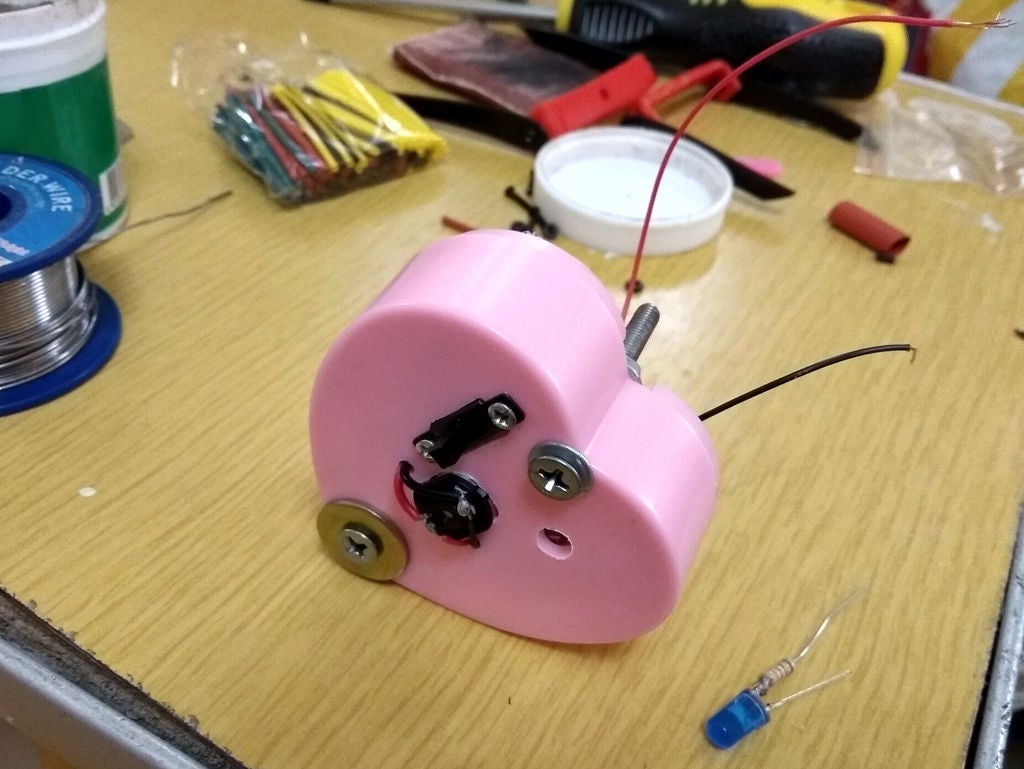
步骤7:切换
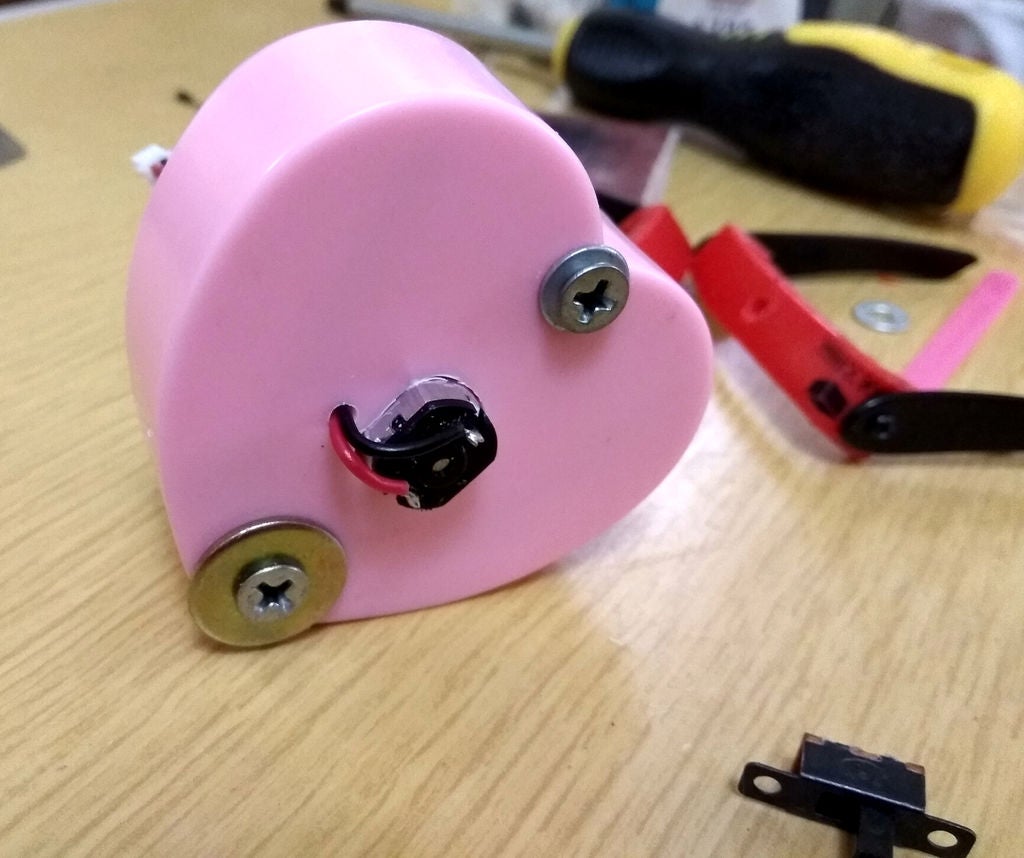
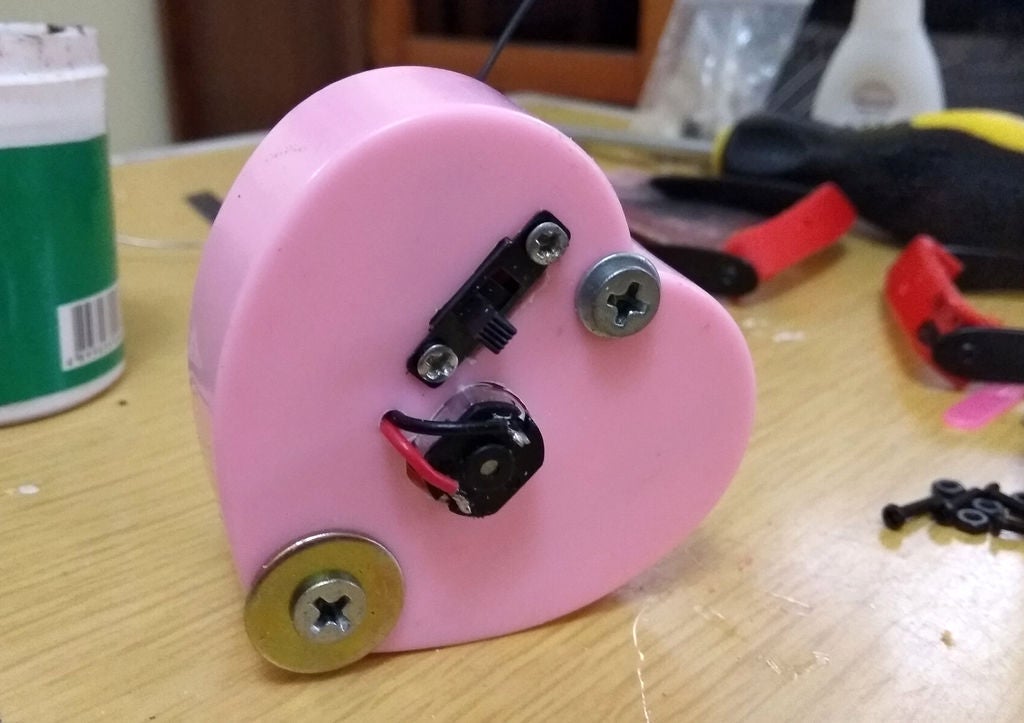
我从微电机上切下插头,所以我可以它的电线可以用于下一步。
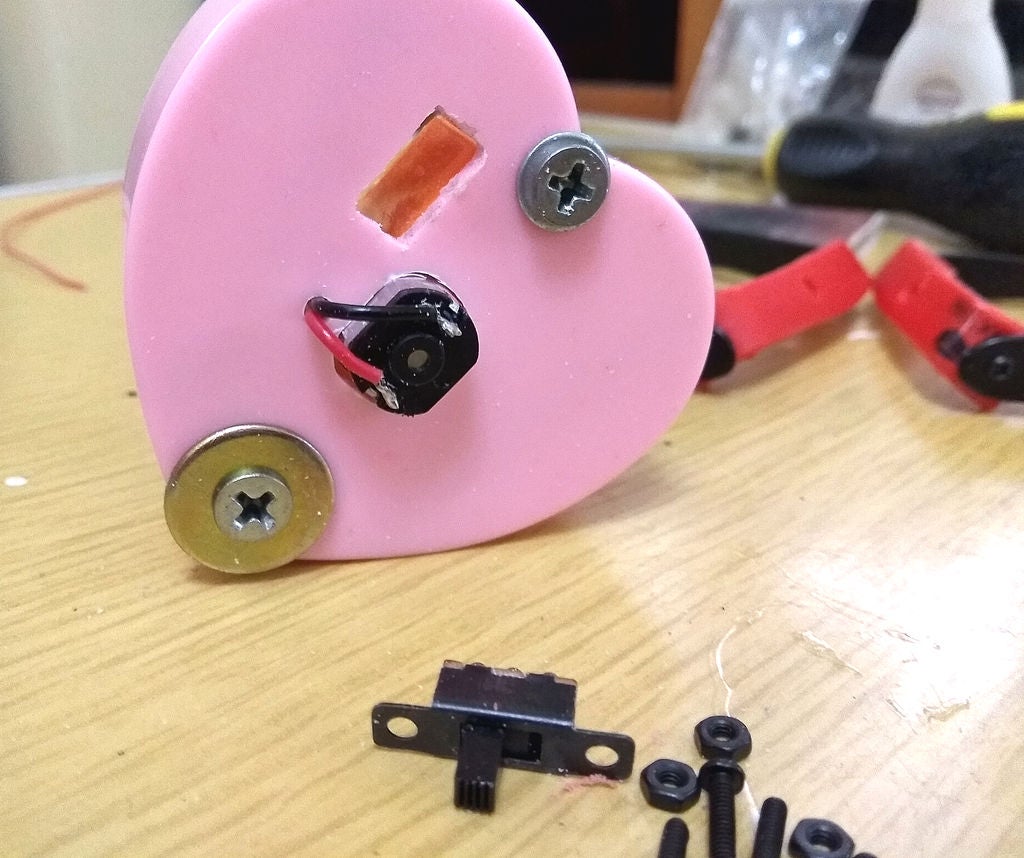
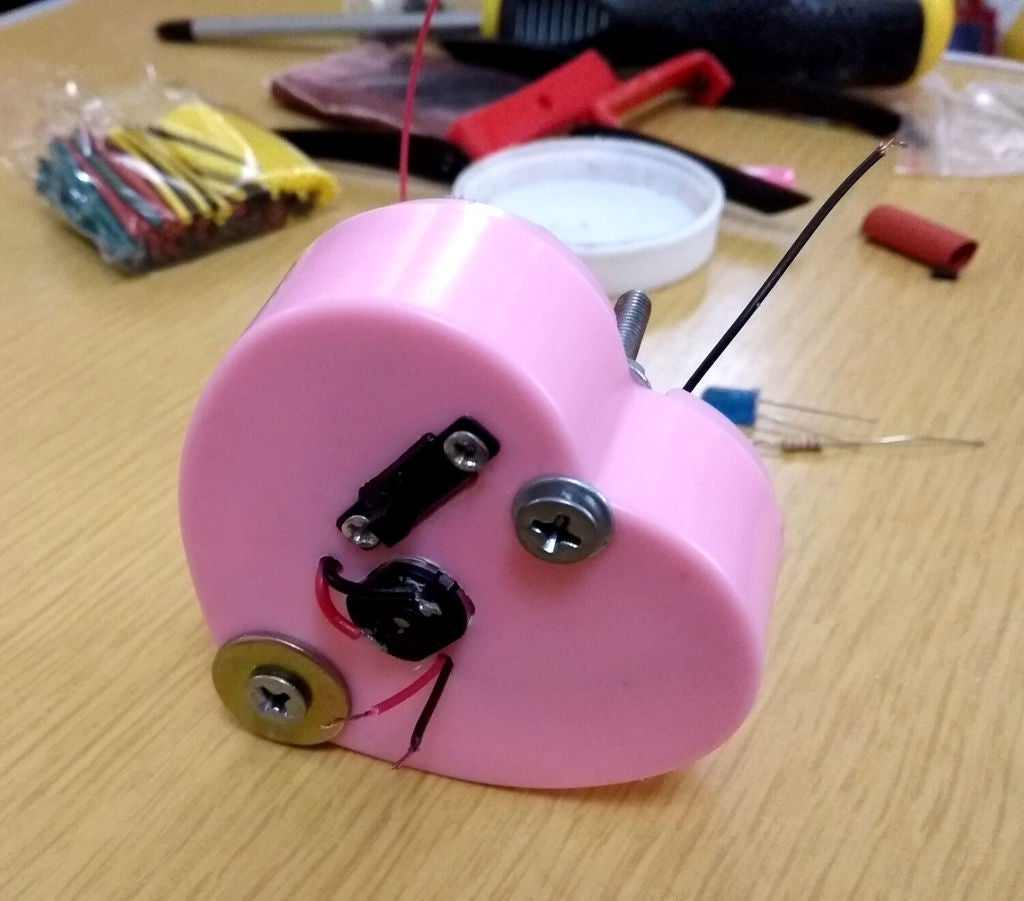
使用Dremel,我在心脏上钻了一个矩形孔,我可以在那里连接开关。我将一根电线从电机焊接到开关的一个引脚上。然后我将另一根黑线焊接到中心针上。
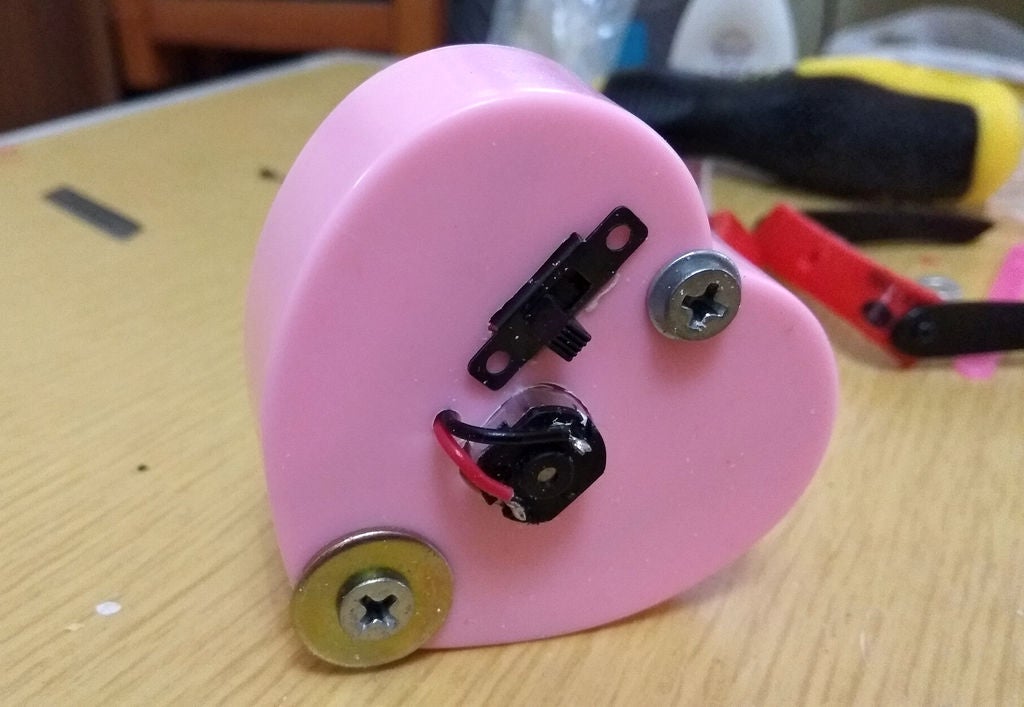
我使用两个小螺钉将开关连接到心脏。
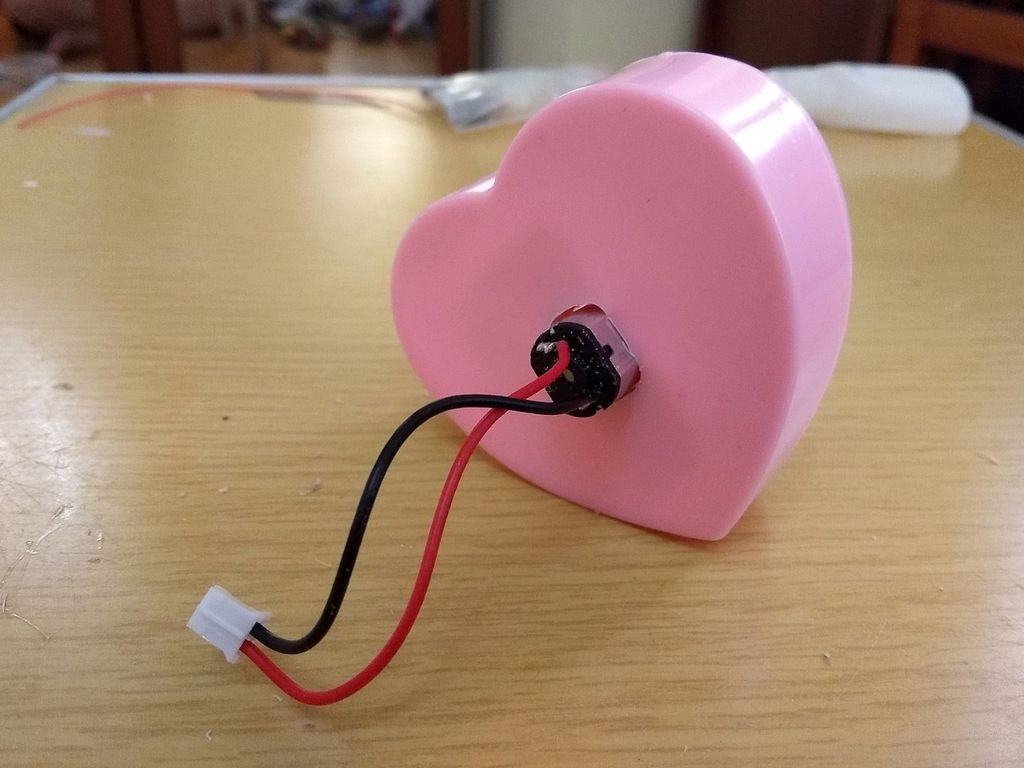
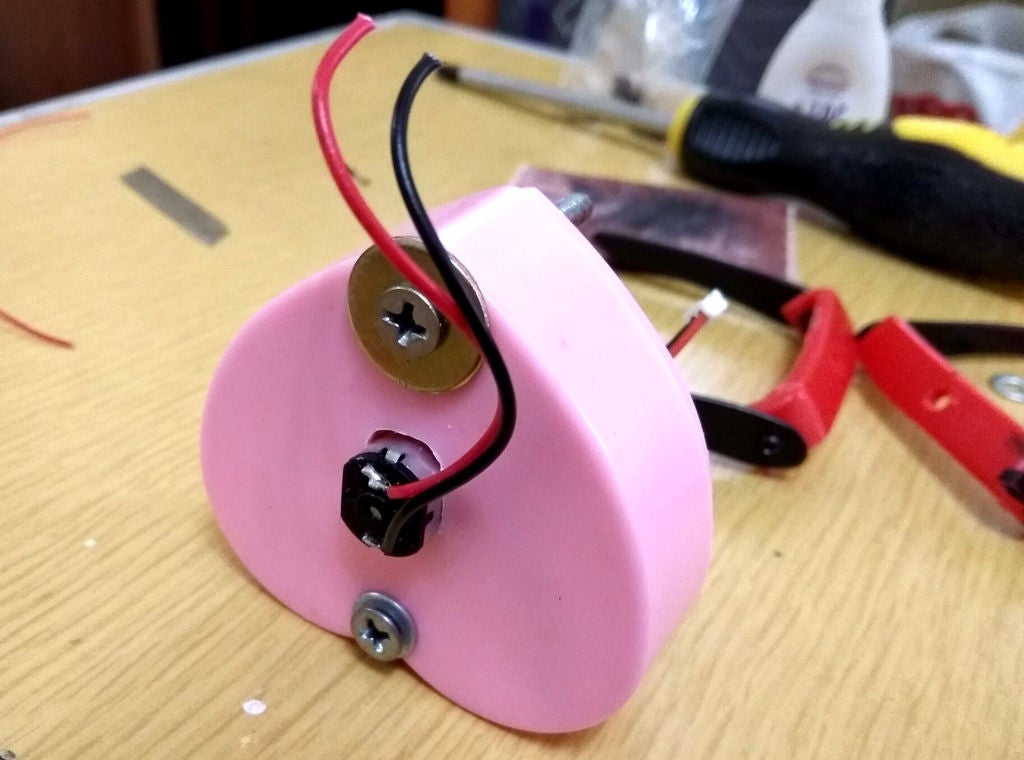
步骤8:套接字

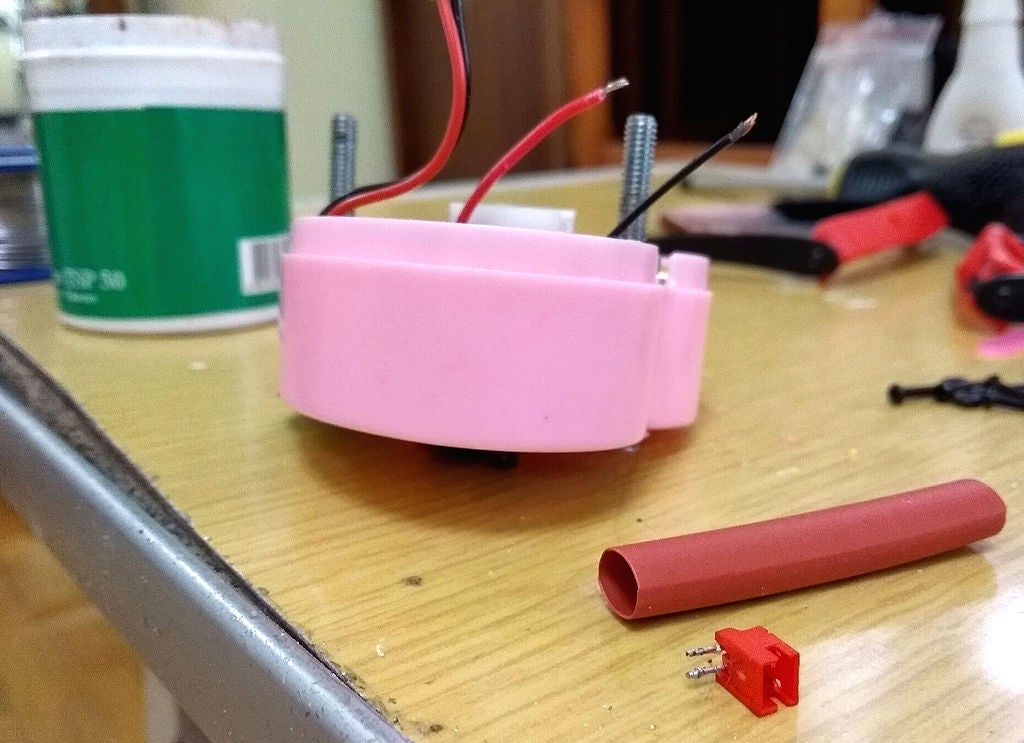

要为此机器人充电,必须从电机上拔下电池并连接到充电器。这意味着我们需要一个与电池插头兼容的迷你插座。幸运的是,我可以从破碎的3D笔板中取出一个从我拿到电池的地方。我将插座的一个引脚焊接到来自电机的红线,另一个引脚连接到来自开关中心引脚的黑线。在焊接之前,我在导线上放置了一些热缩管,以便稍后我可以覆盖焊接点并避免短路。
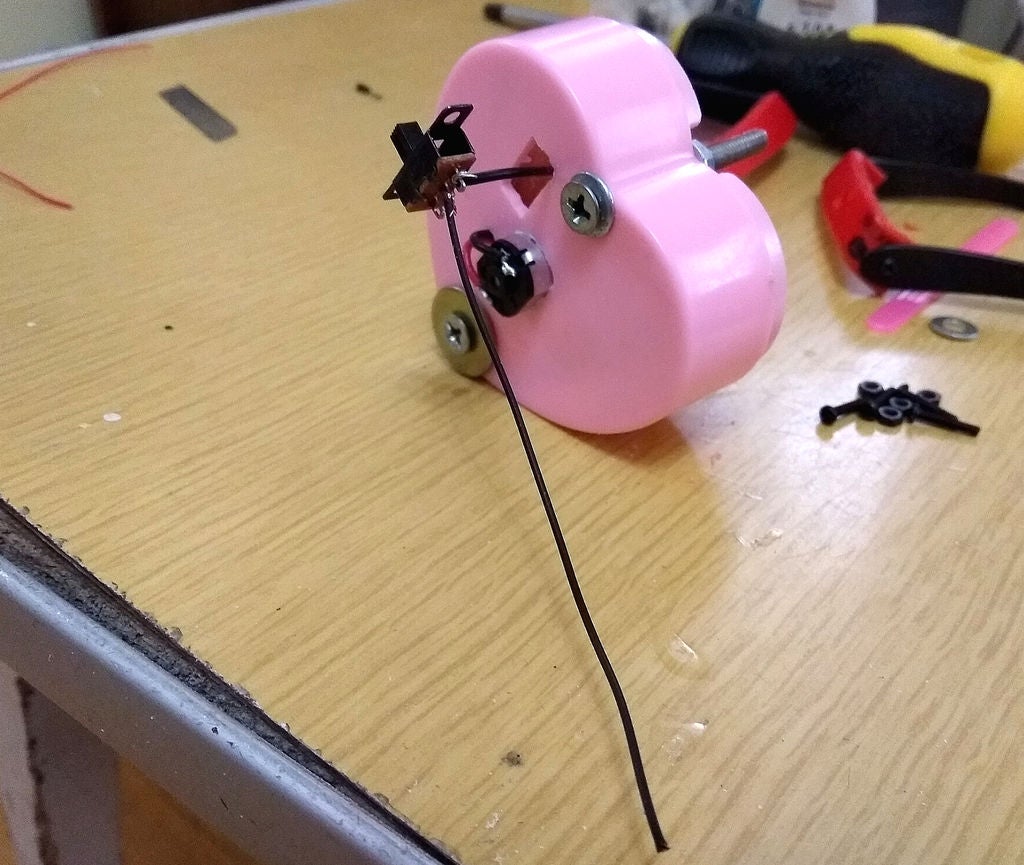
步骤9:LED

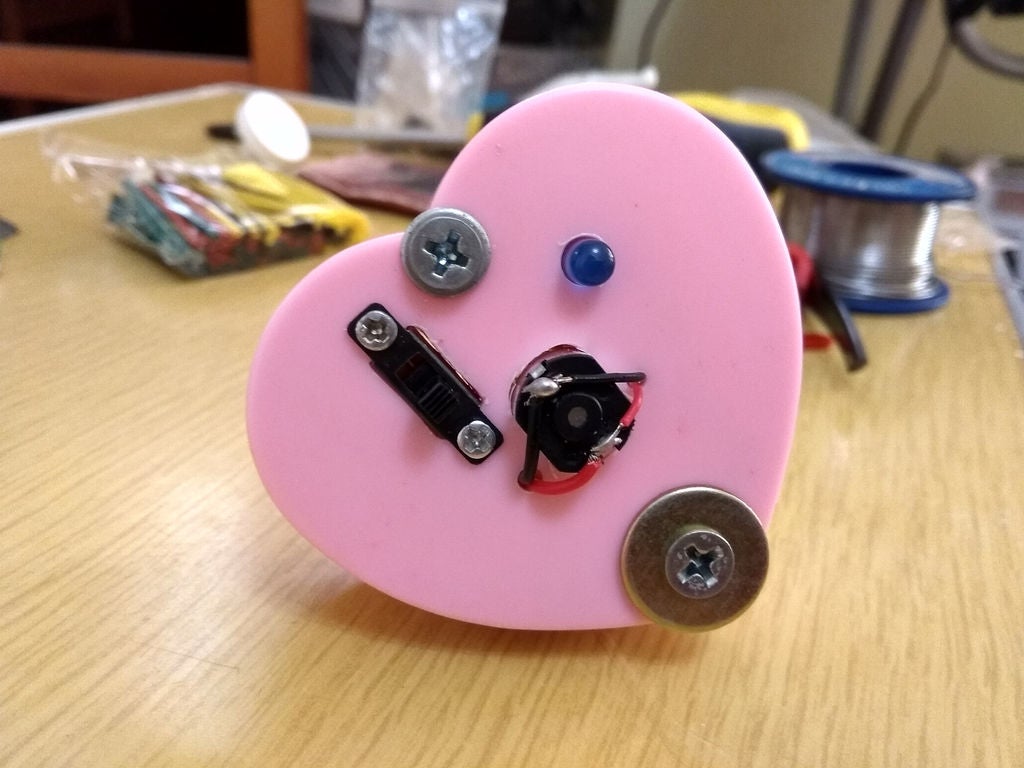


我在心脏上钻了一个额外的孔,并将红色和黑色的电线焊接到电机引脚上,这样我就可以连接LED了。然后我在开关对面钻了一个新的孔,在那里我可以插入LED。
我将电阻器焊接到LED的阳极上,然后我用红色线焊接到它。我将黑线焊接到阴极上。然后我继续测试电路:电机正在旋转,LED发光!
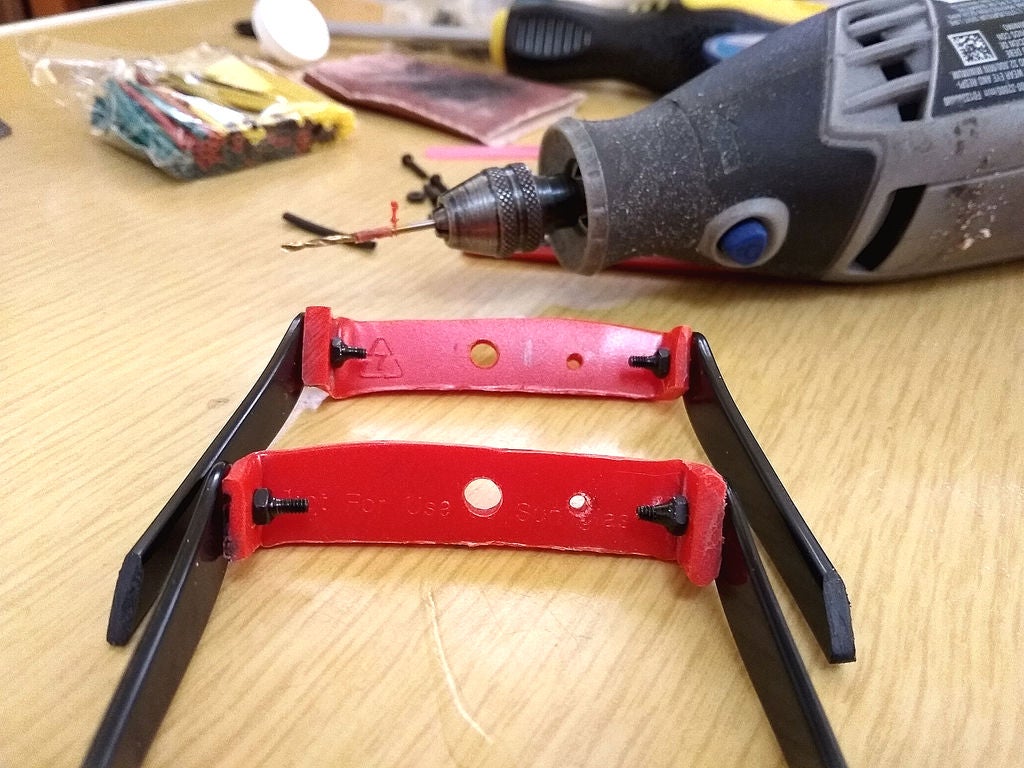
步骤10:臀部(第1部分)





我从一副3D眼镜中移除了太阳穴。使用Dremel的切割盘,我用两根扁平棒将它们变形。然后,我在每个中间钻了一个洞。
步骤11:腿





按照类似的过程,我拿了另外两个3D眼镜,用2对腿改变了太阳穴。然后我在每个上面钻了一个小洞,所以我可以将它们贴在“臀部”上。
第12步:臀部(第2部分)


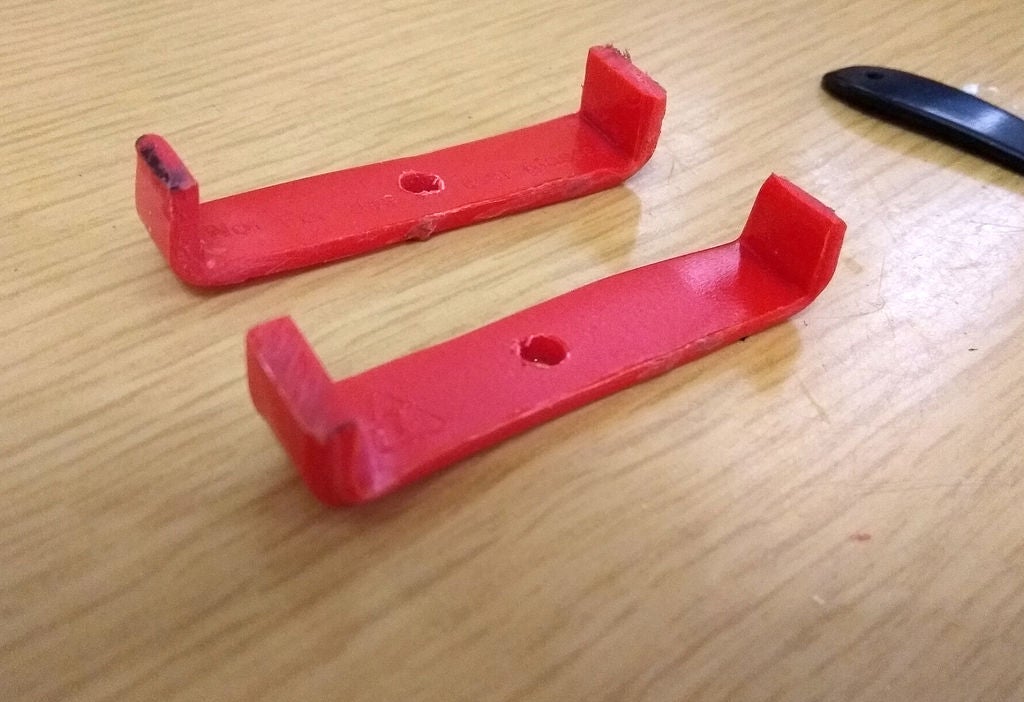

使用热风枪和一块木头,我加热了弯曲每个臀部的两端。然后我在每一端钻了一个洞,以便附着腿。
步骤13:整合臀部和腿部


我用小螺母将每条腿连接到臀部的角度。我检查他们是否足够紧,以便在行走时保持腿部不动,但同时,检查关节以检查腿部是否可折叠。
步骤14:使用曲柄积分腿








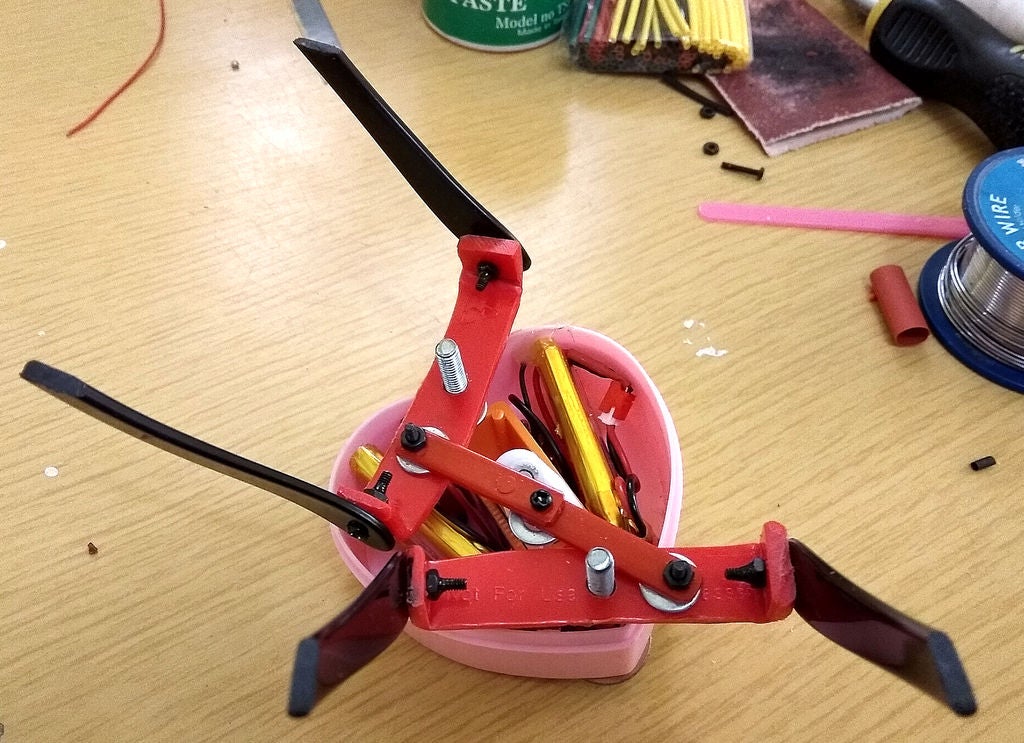
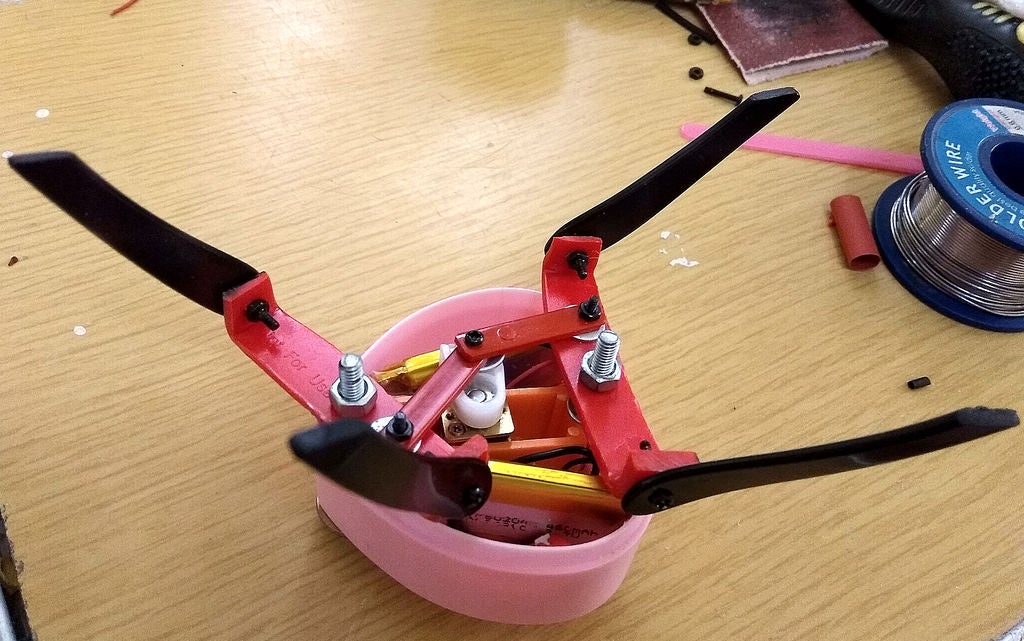
我拿着小红扁棍,把它切成两半,每端钻一个洞。然后我在每个臀部的一侧钻了一个小洞。我将扁平的棍棒贴在每个臀部上,有点松动以便进行关节运动。我在曲柄上钻了一个洞,然后我通过长螺栓插入了臀部。为了保持臀部的位置,我在每个螺栓上添加了一个垫圈和一个螺母,并使用另一个小螺栓将每个扁平杆的可用端部连接到曲柄的孔中。
此步骤中的螺母和螺栓必须允许机构的自由铰接,而不会太松。我在螺母和螺栓之间的联合中添加了一点胶水,以避免因运动造成的拆卸。
步骤15:最后的细节




-
机器人
+关注
关注
213文章
30580浏览量
219573
发布评论请先 登录





 工商网监
工商网监
评论