电感-数字转换器LDC1314是电子工程人员经常会接触的芯片,LDC1314是4-通道12位的电感-数字转换器(LDC),用于解决电感检测问题。采用多个信道和遥感的支持,LDC1314以最低的成本与最小的功耗来获得电感感测的性能和可靠性。此类产品使用简便,仅需要传感器频率处于 1kHz 至 10MHz 的范围内即可开始工作。 由于支持的传感器频率范围 1kHz 至 10MHz 较宽,因此还支持使用非常小的 PCB 线圈,从而进一步降低感测解决方案的成本和尺寸。
ldc1314工作原理
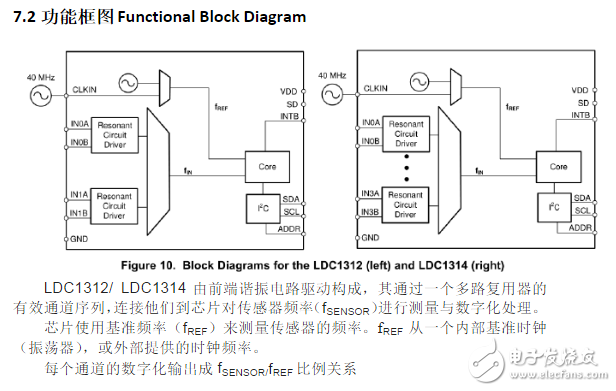
导体在与交变电磁(EM)场接触时将引起磁场变化,可以采用传感器中的电感传感器进行检测。一个电感器与一个电容器可以构造一个L-C振荡器,可以用来产生电磁场。在一个LC振荡器中,当电磁场收到干扰时,可以观察到电感发生微小的偏移,与共振频率存在一定关系。
利用这个原理,在LDC1314是一个电感-数字转换器(LDC),通过测量LC谐振器的振荡频率。该器件输出数字值与振荡频率成比例关系。此频率测量值可以被转换为一个等效电感。
LDC1314特征参数
*合格的汽车应用
*符合AEC-Q100的结果如下:
-设备温度等级1:- 40°C至125°C环境工作温度范围
-设备HBM的ESD等级分类2
-装置CDM ESD分类等级C
*易于使用的最低配置要求
*测量多达4个传感器与一个集成电路
*多渠道支持环境和老龄化补偿
*多通道遥感提供最低系统成本
*引脚兼容的介质和高分辨率选项
-LDC1312-Q1/LDC1314-Q1: 2/4-ch 12-bit LDC
-LDC1612-Q1/LDC1614-Q1: 2/4-ch 28-bit LDC
*支持广泛的传感器频率范围10MHz 1KHz
*35μ低功耗的睡眠模式 -200钠关断模式 *3.3V的操作
*支持内部或外部参考时钟 *对直流磁场和磁铁的免疫
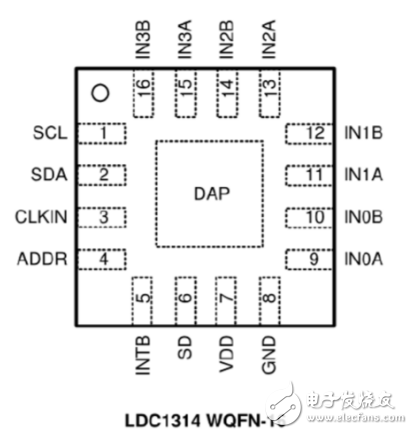
ldc1314引脚图
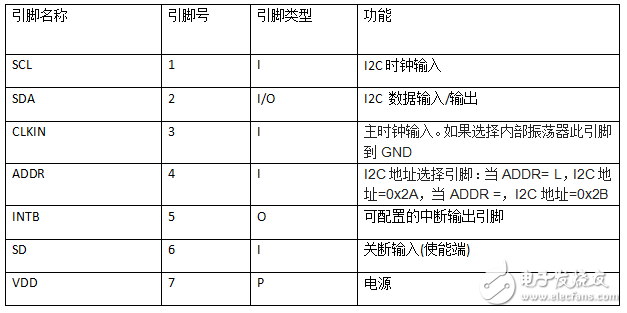
ldc1314引脚定义
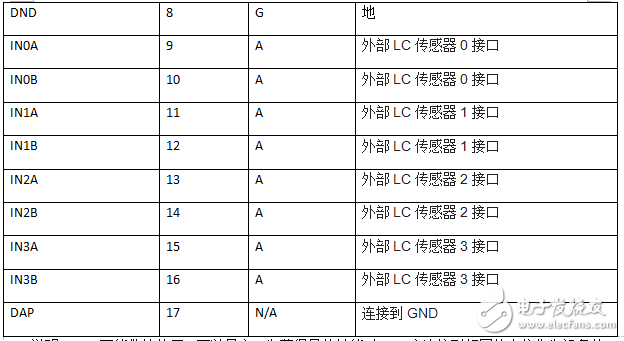
说明:DAP不能做地使用,可以悬空,为获得最佳性能对DAP应连接到相同的电位作为设备的GND管脚。
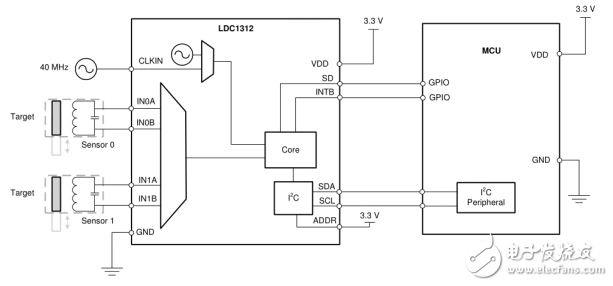
典型ldc1314应用电路一:
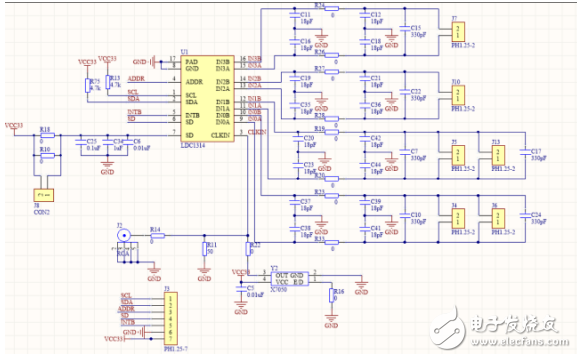
典型ldc1314应用电路二:
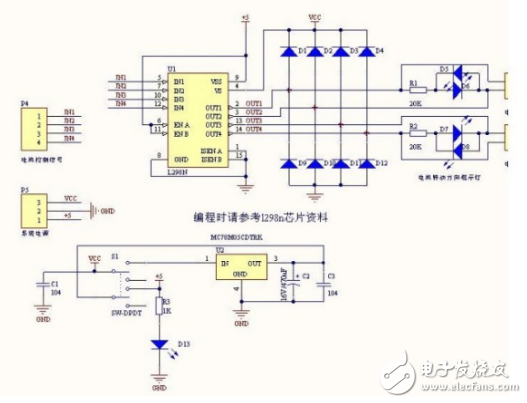
系统以MSP430F169单片机为控制核心,采用可充电锂电池为电源,以L298N为驱动芯片,结合PWM技术实现对4个直流减速机速度控制,从而实现小车的前进、转向等功能。在本系统中,单片机通过LDC1314芯片实现对赛道表面金属丝和硬币的识别与小车位置的判定,利用电机尾部的霍尔传感器与编码器实现对小车行进路程的计算,并使用LCD12864液晶实时显示小车行进路程与所用时间。
电机驱动芯片L298N原理图如下
主程序
void main( void )
{
P2SEL &=~ BIT7; //蜂鸣器
P2DIR |= BIT7;
P2OUT &=~ BIT7;
InitSys();
InitLDC1314();
Ini_Lcd();
P6SEL=0;P6DIR|=BIT0+BIT1;P6OUT&=~(BIT0+BIT1); //电机旋转方向
_EINT();
int i;
InitPWM(0x03E8); //PWM初始化,采用TB输出2路PWM波
TBCCR1=TBCCR2=0;
for(i=0;i《1500;i++) // 电感传感器自校准
{
D1=LDC1314_Result(1);
D2=LDC1314_Result(2);
D3=LDC1314_Result(3);
}
initTA(); // 定时器A初始化,用于计时
go(); //直行
Time=mc=sx=0; //开始执行 时间路程清零
while(1)
{
Component_Display(4,0,Time);//时间
sl=(int)((float)sx*3.0);
Component_Display(4,4,sl); //路程
if(sl》800){while(1);_DINT();TBCCR1=TBCCR2=0;} //到达终点 结束
value1 = LDC1314_Result(1); Component_Display(1,1,value1);//显示通道1
value2 = LDC1314_Result(2); Component_Display(2,1,value2);
value3 = LDC1314_Result(3); Component_Display(3,1,value3);//显示
// 硬币的检测
if ((value1》(2+D1))|| (value2》(2+D2))|| (value3》(2+D3)) || (abs(value2-D2)》20)|| (abs(value1-D1)》20)|| (abs(value3-D3)》20))
P2OUT |=BIT7;
else
P2OUT &=~BIT7;
//循迹
if((abs(value3-D3)《20)&&(D3》value3)) { turn_r(); }
else if((abs(value1-D1)《20)&&(D1》value1)) { turn_l(); }
else go();
}
}
ldc1314例程
ldc1314例程一:
MSP430F149/169驱动LDC1314程序,可用于金属的检测,已给出各个文件名称,自建工程添加文件即可使用。显示程序较为普遍,未给出。
MAIN.C文件
#include 《msp430f169.h》
#include “config.h”
#include “12864.h”
extern uint LDC1314_Result(uchar Channal);
extern void InitLDC1314(void);
/***************************************************
系统初始化,MCLK=8MHz,SMCLK=1MHz
*************************************************/
void InitSys()
{
unsigned int iq0;
_DINT(); // 关中断,本可以不必这样小心
WDTCTL = WDTPW + WDTHOLD;
BCSCTL1 &=~XT2OFF;
do
{
IFG1 &= ~OFIFG; // 清除振荡器失效标志
for (iq0 = 0xFF; iq0 》 0; iq0--); // 延时,等待XT2起振
}
while ((IFG1 & OFIFG) != 0); // 判断XT2是否起振
BCSCTL2 =SELM_2+SELS+DIVS_3; //MCLK,SMCLK时钟为XT2,SMCLK8分频1MHz
}
void main( void )
{
uint value = 0;
InitSys();
InitLDC1314();
Ini_Lcd();
Component_Display(4,0,134);//显示
while(1)
{
value = LDC1314_Result(0);//通道0
Component_Display(1,0,value);//显示
delay_ms(200);
}
_NOP();
}
LDC1314.C文件
#include “LDC1314.h”
/*I2C总线初始化*/
void I2C_Init()
{
LDC_SCL_L(); //拉低时钟线
delay_us(5); //延时
I2C_Stop();
}
//**************************************
//I2C起始信号
//**************************************
void I2C_Start()
{
LDC_SCL_OUT(); // SCL设置为输出
LDC_SDA_OUT(); // SDA设置为输出
LDC_SDA_H(); //拉高数据线
LDC_SCL_H(); //拉高时钟线
delay_us(5); //延时
LDC_SDA_L(); //产生下降沿
delay_us(5); //延时
LDC_SCL_L(); //拉低时钟线
}
//**************************************
//I2C停止信号
//**************************************
void I2C_Stop()
{
LDC_SCL_OUT(); // SCL设置为输出
LDC_SDA_OUT(); // SDA设置为输出
LDC_SDA_L(); //拉低数据线
LDC_SDA_H(); //产生上升沿
delay_us(5); //延时
}
//**************************************
//I2C发送应答信号
//入口参数:ack (0:ACK 1:NAK)
//**************************************
void I2C_SendACK(uchar ack)
{
if(ack)
LDC_SDA_H();
else
LDC_SDA_L();
// SDA = ack; //写应答信号
LDC_SCL_H(); //拉高时钟线
delay_us(5); //延时
LDC_SCL_L(); //拉低时钟线
delay_us(5); //延时
}
//**************************************
//I2C接收应答信号,0有效,1无效
//**************************************
uchar I2C_RecvACK()
{
uchar cy;
LDC_SCL_OUT(); // SCL设置为输出
LDC_SCL_H(); //拉高时钟线
delay_us(5); //延时
if(LDC_SDA_DAT())
{
cy=1;
}
else
{
cy=0;
}
// cy = SDA; //读应答信号
LDC_SCL_L(); //拉低时钟线
delay_us(5); //延时
LDC_SDA_OUT(); // SDA设置为输出
return cy;
}
/*向I2C总线发送一个字节数据*/
uchar I2C_SendByte(uchar dat)
{
uchar i,temp;
LDC_SCL_OUT(); // SCL设置为输出
LDC_SDA_OUT(); // SDA设置为输出
for (i=0; i《8; i++) //8位计数器
{
if((dat《《i))
{
LDC_SDA_H();
}
else
{
LDC_SDA_L();
}
LDC_SCL_H(); //拉高时钟线
delay_us(5); //延时
LDC_SCL_L(); //拉低时钟线
delay_us(5); //延时
}
temp=I2C_RecvACK();
return temp;
}
/*从I2C总线接收一个字节数据*/
uchar I2C_RecvByte()
{
uchar i;
uchar dat = 0,cy;
LDC_SCL_OUT(); // SCL设置为输出
LDC_SDA_OUT(); // SDA设置为输出
LDC_SDA_H(); //使能内部上拉,准备读取数据,
LDC_SDA_IN(); // SDA设置为输入,准备向主机输入数据
for (i=0; i《8; i++) //8位计数器
{
dat 《《= 1;
LDC_SCL_H(); //拉高时钟线
delay_us(5); //延时
if(LDC_SDA_DAT())
{
cy=1;
}
else
{
cy=0;
}
dat |= cy; //读数据
LDC_SCL_L(); //拉低时钟线
delay_us(5); //延时
}
LDC_SDA_OUT();
return dat;
}
/*向I2C设备写入一个字节数据*/
/*
void ByteWrite1314(uchar REG_Address,uchar REG_data)
{
I2C_Start(); //起始信号
I2C_SendByte(SlaveAddress); //发送设备地址+写信号
I2C_SendByte(REG_Address); //内部寄存器地址,
I2C_SendByte(REG_data); //内部寄存器数据,
I2C_Stop(); //发送停止信号
}
*/
//**************************************
//从I2C设备读取一个字节数据
//**************************************
/*
uchar ByteRead1314(uchar REG_Address)
{
uchar REG_data;
I2C_Start(); //起始信号
I2C_SendByte(SlaveAddress); //发送设备地址+写信号
I2C_SendByte(REG_Address); //发送存储单元地址,从0开始
I2C_Start(); //起始信号
I2C_SendByte(SlaveAddress+1); //发送设备地址+读信号
REG_data=I2C_RecvByte(); //读出寄存器数据
I2C_SendACK(1); //接收应答信号
I2C_Stop(); //停止信号
return REG_data;
}
*/
//**************************************
//向I2C设备写入一个字数据
//**************************************
void WordWrite1314(uchar REG_Address,uint REG_data)
{
uchar REG_data_H,REG_data_L;
REG_data_L=(uchar)(REG_data&0xFF);
REG_data_H=(uchar)((REG_data&0xFF00)》》8);
I2C_Start(); //起始信号
I2C_SendByte(SlaveAddress); //发送设备地址+写信号
I2C_SendByte(REG_Address); //内部寄存器地址
I2C_SendByte(REG_data_H); //发送内部寄存器数据,高8位
I2C_SendByte(REG_data_L); //发送内部寄存器数据,低8位
I2C_Stop(); //发送停止信号
}
/*从I2C设备读取一个字数据*/
uint WordRead1314(uchar REG_Address)
{
uint REG_data;
uchar REG_data_H,REG_data_L;
I2C_Start(); //起始信号
I2C_SendByte(SlaveAddress); //发送设备地址+写信号
I2C_SendByte(REG_Address); //发送存储单元地址,从0开始
I2C_Start(); //起始信号,??原因不明
I2C_SendByte(SlaveAddress+1); //发送设备地址+读信号
REG_data_H=I2C_RecvByte(); //读出寄存器数据
I2C_SendACK(0); //接收应答信号
REG_data_L=I2C_RecvByte(); //读出寄存器数据
I2C_SendACK(1); //接收应答非信号
I2C_Stop(); //发送停止信号
REG_data=REG_data_H;
REG_data《《=8;
REG_data|=REG_data_L;
return REG_data;
}
/*初始化LDC1314*/
void InitLDC1314(void)
{
I2C_Init();
while(WordRead1314(DEVICE_ID)!=0x3025);//等待,I2C正常
//WordWrite1314(RESET_DEV,0x8800);
/*重启LDC1314*/
WordWrite1314(CONFIG,0x2451);
/*默认值,睡眠模式开,方便配置*/
WordWrite1314(CLOCK_DIVIDERS_CH0,0X500a);//fSENSOR不分频,fCLK 2分频
/* 时钟源分频选择,分频系数1,1
Using L and C, 得fSENSOR = 1/2π×sqrt(L ×C)
注意fSENSOR须小于8.75 MHz,fSENSOR分频系数才能置1
注意fREF0须至少大于 4 × fSENSOR,以决定fREF0分频系数
fin0 = fSENSOR0/CH0_FIN_DIVIDER
fREF0 = fCLK / CH0_FREF_DIVIDER
*
WordWrite1314(SETTLECOUNT_CH0,0x0A60);
/* 建立(Settling)时间设置
计算得Q=Rp*sqrt(C/L)
寄存器值小于10取10,大于10取其值,且应满足以下条件:
CHx_SETTLECOUNT ≥ QSENSORx × fREFx / (16 × fSENSORx) (10进制)
(1)fSENSORx:x通道传感器频率
(2)fREFx:x通道参考频率
(3)QSENSORx:品质因数,Q=Rp ×sqrt(C/L)
注意,不等式右边算出有小数则向上取整
建立时间tSx = (CH0_SETTLECOUNT*16) / fREF0
通道切换时间tCsd = Channel Switch Delay = 692 ns + 5 / fref (us)
*/
WordWrite1314(RCOUNT_CH0,0xFFFF);
/*转换时间设置
得转换时间tCx = TSAMPLE(采样时间) – tSx – tCsd (us)
由下式算出寄存器的值(有小数则向下取整(舍去)):
转换时间tCx = (CHx_RCOUNT × 16) / fREFx (10进制)
注意寄存器的值化为16进制
*/
/*使用ERROR_CONFIG默认值,错误中断关闭*/
WordWrite1314(DRIVE_CURRENT_CH0,0x9800);
/*传感器驱动电流设置,使用请同时注意CONFIG寄存器相关配置
查数据手册的Figure 15,得IDRIVE值(10进制),INIT_DRIVE值不使用,保持默认
使用CH0_IDRIVE[15:11]时,Rp Override须打开
使用CH0_INIT_IDRIVE[10:6]时,保证AUTO_AMP_DIS位不置位
*/
//WordWrite1314(MUX_CONFIG,0x801);
/* 多通道转换选择,输入尖峰脉冲滤波器带宽选择,使用请同时注意CONFIG寄存器相关配置!
(a)置AUTOSCAN_EN位为b1使能连续模式(sequential mode)
(b)置RR_SEQUENCE位为b00使能两个通道的数据转换(channel 0,channel 1)
(c)置DEGLITCH位为b100设定输入尖峰脉冲滤波器带宽,此值必须高于谐振频率fTank!
*/
//WordWrite1314(OFFSET_CH0,0x00);
/*频率偏移(补偿)设置
可以设置从每个数据值中减去偏移值,以补偿频率偏移或最大化动态范围的样本数据
fOFFSET0 = CH0_OFFSET * (fREF0/2^16)
且偏移值应小于 fSENSORx_MIN / fREFx
*/
//WordWrite1314(RESET_DEV,0x00);
/*输出增益设置,[10:9],对所有通道有效
对于传感器信号变化量小于满量程25%的系统,设置输出增益可以提供更高的分辨率(精度)
*/
/*
状态寄存器:STATUS,ERROR_CONFIG
*/
WordWrite1314(CONFIG,0x1501);
/*默认连续转换(单)通道0,睡眠模式关,Rp Override开
低功耗模式关,传感器自动幅度校正(AUTO_AMP)关,Ref时钟源选外部时钟源
INTB中断开,高电流驱动关*/
}
/*读取LDC1314转换结果,输入参数为选择通道数*/
uint LDC1314_Result(uchar Channal)
{
uint temp=0;
switch(Channal)
{
case 0x00:
temp=WordRead1314(DATA_CH0); //通道0
break;
case 0x01:
temp=WordRead1314(DATA_CH1); //通道1
break;
case 0x02:
temp=WordRead1314(DATA_CH2); //通道2
break;
case 0x03:
temp=WordRead1314(DATA_CH3); //通道3
break;
default :
break;
}
while((temp&0xF000)!=0);
/*有错误Flag!,有输出增益时注意此句,可能出错!
0x000 = under range,0xfff = over range
*/
return temp;
}
LDC1314.H文件
#ifndef __LDC1314_H
#define __LDC1314_H
#include 《msp430f169.h》
#include “config.h”
static void I2C_Init();
static void I2C_Start();
static void I2C_Stop();
static void I2C_SendACK(uchar ack);
static uchar I2C_RecvACK();
static uchar I2C_SendByte(uchar dat);
static uchar I2C_RecvACK();
static void WordWrite1314(uchar REG_Address,uint REG_data);
static uint WordRead1314(uchar REG_Address);
void InitLDC1314(void);
uint LDC1314_Result(uchar Channal);
//****定义LDC1314硬件接口(不同硬件修改此处即可)***********
#define LDC1314DIR P1DIR
#define LDC1314OUT P1OUT
#define LDC1314IN P1IN
#define LDC_SCL BIT2
#define LDC_SDA BIT3
#define LDC_INTB BIT4//中断
#define LDC_SD BIT5//置高,则进入掉电模式
//*********I2C硬件相关接口函数**************
#define LDC_SCL_OUT() LDC1314DIR |= LDC_SCL // SCL脚输出
#define LDC_SCL_H() LDC1314OUT |= LDC_SCL // SCL拉高
#define LDC_SCL_L() LDC1314OUT &= ~LDC_SCL // SCL拉低
#define LDC_SDA_OUT() LDC1314DIR |= LDC_SDA // SDA脚输出
#define LDC_SDA_H() LDC1314OUT |= LDC_SDA // SDA拉高
#define LDC_SDA_L() LDC1314OUT &= ~LDC_SDA // SDA拉低
#define LDC_SDA_IN() LDC1314DIR &= ~LDC_SDA // SDA脚输入
#define LDC_SDA_DAT() (LDC1314IN&LDC_SDA) // SDA输入数据
#define SlaveAddress 0x2A //IIC写入时的地址字节数据,+1为读取,ADDR接高电平,地址则为0x2B
#define DATA_CH0 0x00 //Channel 0 Conversion Result and Error Status
#define DATA_CH1 0x02
#define DATA_CH2 0x04
#define DATA_CH3 0x06
#define RCOUNT_CH0 0x08 //Reference Count setting for Channel 0
#define RCOUNT_CH1 0x09
#define RCOUNT_CH2 0x0A
#define RCOUNT_CH3 0x0B
#define OFFSET_CH0 0x0C //Offset value for Channel 0
#define OFFSET_CH1 0x0D
#define OFFSET_CH2 0x0E
#define OFFSET_CH3 0x0F
#define SETTLECOUNT_CH0 0x10 //Channel 0 Settling Reference Count
#define SETTLECOUNT_CH1 0x11
#define SETTLECOUNT_CH2 0x12
#define SETTLECOUNT_CH3 0x13
#define CLOCK_DIVIDERS_CH0 0x14
#define CLOCK_DIVIDERS_CH1 0x15
#define CLOCK_DIVIDERS_CH2 0x16
#define CLOCK_DIVIDERS_CH3 0x17
#define STATUS 0x18 //Device Status Report
#define ERROR_CONFIG 0x19 //Error Reporting Configuration
#define MUX_CONFIG 0x1A //Channel Multiplexing Configuration
#define CONFIG 0x1B //Conversion Configuration
#define RESET_DEV 0x1C //Reset Device
#define DRIVE_CURRENT_CH0 0x1E //Channel 0 sensor current drive configuration
#define DRIVE_CURRENT_CH1 0x1F
#define DRIVE_CURRENT_CH2 0x20
#define DRIVE_CURRENT_CH3 0x21
#define MANUFACTURER_ID 0x7E //厂商ID,默认值0x5449
#define DEVICE_ID 0x7F //设备ID,默认值0x3054
#endif