电子发烧友网站提供《精密微型MEMS IMU ADIS16505-2bmlz数据手册.pdf》资料免费下载
2024-03-18 09:38:24 0
0 精工爱普生公司(TSE:6724,“爱普生”)开发了M-G370PDG(“M-G370G”),扩展了其惯性测量单元1(IMU)阵容,该IMU配备了高性能的六自由度传感器。M-G370G将于2023
2024-02-27 14:36:31 119
119 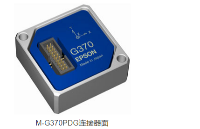
ADIS16550BMLZ高性能惯性测量单元(IMU)性能指标解析大家好,我是来自深圳市华沣恒霖电子的芯片销售员。今天,我想和大家分享一款备受瞩目的高性能惯性测量单元(IMU
2024-02-16 21:55:26
ADIS16505-2BMLZ高性能惯性测量单元(IMU)的性能指标解析摘要:本文将对ADIS16505-2BMLZ高性能惯性测量单元(IMU)的性能指标进行详细解析,包括其工作原理、测量精度
2024-02-16 19:24:45
无锡瑞吉星电子的RJX-IMU-164系列;
参数如下:
一 、概述
RJX-IMU-16460高精度惯性测量单元是一款小型高精度MEMS惯性测量单元,可与ADIS-16460实现原位插拔替换、内部
2024-01-18 13:46:16
一般描述M-G552PJ1是一个小的形状因子惯性测量单元(IMU),具有6个自由度:三轴角速率和线性加速度,并提供了高稳定性和高精度的测量能力与使用的高精度补偿技术。通过控制器局域网(CAN)接口
2024-01-12 10:56:270 一般描述 M-G370PDF1是一个小的形状因子惯性测量单元(IMU),具有6个自由度:三轴角速率和线性加速度,并提供了高稳定性和高精度的测量能力与使用高精度补偿技术。各种校准参数被存储在IMU
2024-01-11 17:00:110 M-G370PDS0是一个小的形状因子惯性测量单元(IMU),具有6个自由度:三轴角率和线性加速度,并提供高稳定性和高精度的测量能力精密补偿技术。各种校准参数被存储在IMU的存储器中,并且是
2024-01-11 09:55:450 当日,赛莱克斯北京获得了某客户的采购订单,开始对首批MEMS-IMU 8英寸晶圆进行小批量生产。IMU是惯性测量定位中的核心部件,主要负责测量三轴姿态角和加速度。
2024-01-02 09:44:37281 的时候,读到的数据都是0x10,我上午尝试了一下软件复位和充值adis16210的默认值后,发现读到的数据变成了0x2a,无论如何改变传感器的状态,都不能对读取的传感器数据有任何影响。实在是搞不懂什么原因了,请帮忙解惑!谢谢!
2024-01-02 06:22:51
ADIS16488数据接口只能支持SPI协议吗?能否配置成I2C?
还有引脚1、2、7、9,是DIO3 DIO4 DIO1 DIO2数字输入输出,这四个引脚可否配置成串口232的输入和输出
2024-01-01 07:55:56
我使用STM32单片机与ADIS16488通过SPI通信,连接图和官方手册一样,其中23引脚实时时钟电源和9引脚数据就绪我没有接,因为我不需要用外部时钟和数据就绪信号,我是在初始化各个引脚后,先去用
2024-01-01 07:47:42
当使用 ADIS 16488 获取原始数据时, 我发现当 ADIS 16488 是静态时, 陀螺仪的输出噪声太大。 您的参考文献是 ATIS 16488 的音调值附在下面。 从图中可以很容易看到输出
2024-01-01 07:00:46
请问:
1.ADIS16488在使用外部同步时钟时,可以使用FIR吗?
2.对不同的FIR对外部时钟频率有要求吗?
3.配置完FIR后对输出频率是否有影响?
4.从我给出同步时钟,到最后
2023-12-29 08:29:02
最近用到一块ADIS16488BLMZ模块,但是上电后,其工作电流很小,并且SPI接口不通讯。我用上位机给模块发送0x7E00后,模块的DOUT接口始终保持低电平。不是是何原因,特此请教
2023-12-29 07:56:07
ADIS16228 或者 ADIS16227
是否可以用于0~10hz以内的低频振动信号检测?(FFT数据处理及输出)
另外是否支持在AUTO-FFT模式的同时,既可以获得当前加速度值又可以同时获得当前处理的FFT结果。?
2023-12-29 07:28:40
ADIS16 IMU2和ADIS1644X/FLEX在哪可以买到,自己做的话两个电容是多大的,两排管脚什么型号,有没有关于ADIS16IMU2的详细资料
2023-12-29 07:14:24
我用adis16365做一款捷联惯导,测试时发现静止时或较小的晃动过后adis16365的陀螺漂移比较小,大约零点几度每秒,但较大的晃动后再静止,漂移变大,能达到约10度每秒,不知是什么原因,是adis16365出问题了吗?还是电路设计有问题?谢谢。
2023-12-29 06:59:31
ADIS16488输出异常!寻求技术人员帮助。
下图为16488加速度X在双轴转到绕Y轴翻转,敏感重力加速度的分量输出过程。另外其他轴表现同样现象
问题:翻转过程中,为什么出现阶梯状,是不是内部自补偿引起的??还望解答。谢谢
2023-12-29 06:49:39
您解释指导;
2.ADIS16006加计采样频率如果超过10k会发生采样错误,而输入的时钟频率最小是10KHz,如果CS引脚一直是低电平,是不是把时钟频率设为160KHz可能造成采样错误?
谢谢!
2023-12-29 06:42:39
想知道ADIS16375这款IMU的输出角度是个什么样的角度?是不是姿态角?其参考坐标系是什么?输出角的实时精度是多少?ADIS16365、ADIS16334、ADIS16445、ADIS16485这四款IMU能够输出角度吗?若果能,分别是什么样的角度?其参考坐标系分别是什么?谢谢!
2023-12-29 06:17:47
1、ADIS16365与ADIS16460哪个漂移比较少,精度比较高?
2、能否提供ADIS16365的驱动代码?
2023-12-29 06:00:44
近期由于课题需要购买了型号为ADIS16470的MEMS-IMU产品,尝试使用后得到了数据结果,但有如下问题。
1静态实验下,得到的陀螺仪数据单位若是°/s,则明显量级过大,远大于地球自转
2023-12-28 08:18:21
您好!
我使用STM32F103的SPI接口与ADIS6465通信,试图读取product-ID(addr=0x72),但结果大多时候都不正确,极少数时候会得到正确结果0x4051。
错误的时候得到
2023-12-28 08:16:22
我想彻底地恢复ADIS16488的设置,包括将各个寄存器恢复到初始化设置、进行工厂校准恢复、以及清除闪存等等。
我在GLOB_CMD寄存器里面看到了几个标志位,有恢复软件复位、工厂校准恢复等标志位
2023-12-28 08:09:41
配置imu,后直接读取传感器的数据,debug看数据的话,数据明显不对,这个是什么问题;tips:在配置的时候进行了恢复工厂校准。第一张图是配置imu,第二张是读取数据,第三张是实时显示读取的数据,imu放在桌子上,三轴的角速度都不对,加速度值是对的
2023-12-28 08:09:02
大家好,最近我在使用ADIS16448做IMU和GPS的融合。IMU主要是完成卡尔曼滤波里预测的步骤,所以我需要为我的IMU设置系统噪声参数Q。然而在ADIS16448的参数表里,我似乎找不到相应
2023-12-28 08:04:44
大家好,我的ADIS16405传感器最开始数据读取时准确正常的,后来不小心电路板不知道哪里短路,数据依然能够读取,但导致ADIS16405数据读取有问题,在没有动作的情况下读出来的数据如下:
在
2023-12-28 07:39:18
使用单片机通过spi读取adis16488A的9轴数据,读取慢的时候(10hz)可以正常读取。读的快的话(100hz),前几秒数据是对的,之后全变0或常数。spi时钟1mhz。
上电后mcu控制
2023-12-28 07:38:50
通过eval-adis开发板向adis16488的DEC_RATE写入数值修改采样频率,查询无误,但重新上电后总是变回默认的数值,是否需要其他操作
2023-12-28 07:35:52
我使用F28335与ADIS16488通过SPI通信,连接图和官方手册一样,供电为3.3V,先去用SPI读取传感器的PROD_ID,按照手册上写的,如果读取为0X4068,则代表SPI协议读取正确
2023-12-28 07:35:38
我现在采集到的ADIS16477-2的imu数据,测试陀螺、加速度计的漂移非常大,IMU是放在台面上镜子不动的。
下图第一排陀螺x、y、z的原始数据,第二排分别是5s钟平滑后的数据。
下图第一排
2023-12-28 07:25:03
在使用ADIS16365的过程中,我们使用ADIS16365的默认系统设置,读取陀螺仪的测量值。
为了验证读数是否正确,在读取陀螺仪的过程中将ADIS16365分别绕x轴,y轴,z轴转动360度
2023-12-28 07:05:22
用EVAL-ADIS评估板对ADIS16488A数据采集时数据时是正常的,过些时间数据发生错误,所有寄存器的值都变成FFFF,重新插拔16488到评估板上可能还好用,但过些时间又发生同样的问题,如图所示,请问这是什么原因那?
2023-12-28 07:01:35
在使用MEMS惯性测量单元ADIS16477时,静止状态下所测量的数据变化范围很小,同时在平滑路面上进行动态测试效果也还不错,今本上和ADIS16375数据接近x和z轴方向加速度在±3°,但在比较抖
2023-12-28 06:51:23
我这边在调试ADIS16477时遇到几个问题需要咨询一下:
1、在ADIS477通过SPI通信与STM32F4进行通信的时候,在对ADIS16477加入了软件复位的控制寄存器,并按照手册加入
2023-12-28 06:42:31
ADIS16488或者16480中,有关加速度计的输出都是多少g,请问这个g等于多少m/s^-2,是9.8还是9.78还是多少?有没有一个确定的值?
2023-12-28 06:37:37
在调试ADIS16375过程中发现有一定概率(大约6个中间有一个)出现读到的数据全0的情况(包括角速率、加速度、温度及ID(实际应为16375)),特别在快速温度变化(以6℃/min降温过程中)尤其明显,不知道有谁曾经遇见此问题,是IMU自身问题还是需要特殊设置?
2023-12-28 06:33:59
)
{
Read_ADIS16209_Data(XINCL_OUT,XINCL_OUT_DATA);
HAL_Delay(10);
Read_ADIS16209_Data(YINCL_OUT
2023-12-28 06:25:51
亲爱的工程师您好,就是我在使用评估板过程中遇到一些问题,感谢您的解答:
1. ADIS16488对应的评估板可以将角速度和加速度的信息按照某种协议经串口输出来吗?
2. 如果不能输出来,那我们使用者该如何做才能达到这个要求?
-
2023-12-28 06:04:22
1、我们开发的系统是运行在windows平台下的,现在需要添加IMU单元,请问这个能怎么通过USB连接PC或以太网口直接获取imu传感器的数据呢?
2、请问你们的有相应的开发SDK吗?
2023-12-27 06:15:18
激光跟踪仪与空间姿态探头(iProbe 6D姿态探头)配合使用,就组成六自由度激光跟踪仪。它能够根据合作目标的精确空间姿态对被测工件的内部特征、隐藏特征或曲面等复杂特征进行快速、高精度的测量。
2023-12-12 09:39:51287 
村田MEMS惯性测量单元(IMU)SCHA634产品分析
2023-11-27 16:27:32387 
电子发烧友网站提供《ADI公司突破性的微机电系统(MEMS)开关技术.pdf》资料免费下载
2023-11-27 09:52:201 来源:华安机械 分析师张帆,谢谢 编辑:感知芯视界 万仞 获取最新IMU行业研究报告,可在感知芯视界首页对话框,回复“IMU”免费下载。 【摘要】 ○预计高性能MEMS IMU市场规模最高达100
2023-11-23 09:19:11416 中图仪器牵头的国家重点研发计划——“六自由度激光自动精准跟踪测量关键技术"的项目综合绩效评价会议在深圳顺利召开。本项目瞄准我国航空航天、汽车船舶、轨道交通、机器人、核电、大科学装置等装备制造领域
2023-10-27 11:27:00
近年来,一些端到端学习方法被提出以增强六自由度物体定位的鲁棒性,包括:直接回归几何参数;采用渲染 - 比对来迭代地优化位姿。尽管基于学习的方法具有潜力,但是直接回归法精度有限、泛化能力差
2023-10-16 17:13:21319 
GTS六自由度激光自动精准跟踪测量仪是高精度、便携式的空间大尺寸坐标测量机,是同时具高精度(μm级)、大工作空间(百米级)的高性能光电测量仪器,被广泛应用在飞机、汽车、船舶、航天、机器人、核电
2023-10-12 09:26:16
电子发烧友网站提供《多自由度仿生假手嵌入式控制系统及其抓取策略.pdf》资料免费下载
2023-10-10 11:18:381 电子发烧友网为你提供ADI(ADI)ADIS16550: 自治等级,6度自由不感官自由6度数据表相关产品参数、数据手册,更有ADIS16550: 自治等级,6度自由不感官自由6度数据表的引脚
2023-10-09 18:50:05

TAC-440 IMU的突破性性能基于EMCORE成熟的石英MEMS惯性传感器技术。EMCORE的石英技术结合了石英材料固有的大信号输出和热稳定性,可重复、大批量生产精密加工的传感器结构。
2023-09-15 11:48:12139 广。 MEMS 重要类别——IMU 惯性测量单元一直是MEMS市场里重要的产品类型,主要包括加速度计、陀螺仪和磁力计。如今,由分立的惯性测量单元组合成的三轴、六轴、九轴IMU,将加速度传感器、陀螺仪、磁传感器等MEMS器件集成在一起,以满足生产
2023-08-01 00:08:001007 GTS6000激光跟踪仪与空间姿态探头配合组成六自由度激光跟踪仪,能够根据合作目标的精确空间姿态对被测工件的内部特征、隐藏特征或曲面等复杂特征进行快速、高精度的测量。
2023-07-21 10:58:58402 
ADIS16488A iSensor®是一款完整的惯性系统,内置一个三轴陀螺仪、一个三轴加速度计、一个三轴磁力计和一个压力传感器。每个惯性传感器都实现了业界领先的iMEMS®技术与信号
2023-07-21 10:47:15
ADIS16467 是一款精密微电子机械系统 (MEMS) 惯性测量单元 (IMU),它包括一个三轴陀螺仪和一个三轴加速度计。 ADIS16467 中的每个惯性传感器均结合了信号调节功能以优化动态
2023-07-21 10:18:16
ADIS16465 是一款精密微电子机械系统 (MEMS) 惯性测量单元 (IMU),它包括一个三轴陀螺仪和一个三轴加速度计。 ADIS16465 中的每个惯性传感器均结合了信号调节功能以优化动态
2023-07-21 10:15:52
ADIS16477是一款精密、微型MEMS惯性测量单元(IMU),内置一个三轴陀螺仪和一个三轴加速度计。ADIS16477中内置的每个惯性传感器都结合了信号调理技术,可优化动态性能。工厂校准针对各
2023-07-21 10:01:16
ADIS16507 是一款精密的微型微机电系统 (MEMS) 惯性测量单元 (IMU),它包括一个三轴陀螺仪和一个三轴加速度计。ADIS16507 中的每个惯性传感器均
2023-07-21 09:53:45
ADIS16505 是一款精密的微型微机电系统 (MEMS) 惯性测量单元 (IMU),它包括一个三轴陀螺仪和一个三轴加速度计。ADIS16505 中的每个惯性传感器均结合了可优化动态性能的信号调节
2023-07-21 09:50:40
ADIS16500 是一款精密的微型微机电系统 (MEMS) 惯性测量单元 (IMU)。它包括一个三轴陀螺仪和一个三轴加速度计。ADIS16500 中的每个惯性传感器均结合了可优化动态性能的信号调节
2023-07-21 09:47:47
ADIS16260/ADIS16265均为可编程数字陀螺仪 , 集业界领先的MEMS和信号处理技术于一体 , 采用紧凑型单封装 。 这些
2023-07-18 14:40:45
ADIS16260和ADIS16265可编程数字陀螺仪在单个紧凑型封装内集成了业界领先的MEMS和信号处理技术,具有同类MEMS陀螺仪需要全动校准才能达到的精度性能。接通电源后,无需从系统处理器发出
2023-07-18 14:33:06
ADIS16136 iSensor® MEMS 陀螺仪是一款高性能、数字陀螺仪检测系统,自治工作,无需用户配置便可产生精确的速率检测数据。其性能优势包括低噪声密度、宽带宽和出色的运动中偏置
2023-07-18 13:48:07
据麦姆斯咨询报道,近期,无锡凌思科技有限公司(简称:凌思科技)宣布其开发的IMU500高精度汽车级MEMS惯性测量单元(IMU)已开始批量生产。
2023-07-14 10:17:26338 电子发烧友网站提供《Scorbot ER-V+自由度机器人手臂控制器和模拟器设计.zip》资料免费下载
2023-07-10 15:08:570 Ericco的MEMS陀螺仪根据轴数分为单轴、双轴和三轴。它分为工业级、战术级(ER-MG-056、ER-MG-067)和导航级(ER-MG2-50/100、ER-MG2-300/400)。战术
2023-07-07 10:16:472079 线性2自由度汽车模型是汽车操纵稳定性分析中最简单、最典型的模型。
2023-06-28 16:52:311166 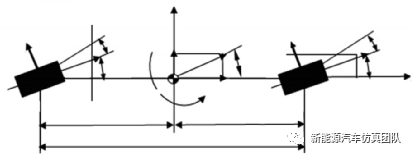
本期采用Simulink建立汽车2自由度动力学模型。为了便于掌握汽车稳定性的基本特性,对汽车简化为线性二自由度的汽车模型,忽略转向系统的影响,直接一前轮转角作为输入;忽略悬架的作用,认为汽车车厢只作用于地面的平面运动。
2023-06-28 16:39:131100 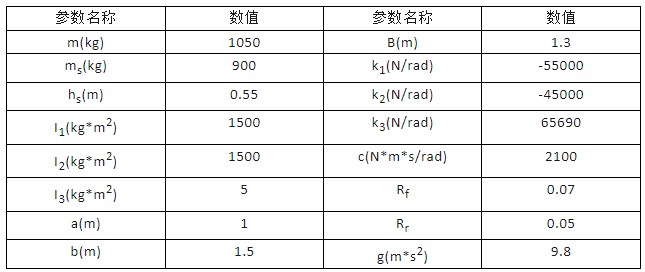
本文示例将实现4自由度并联机器狗行走的功能。
2023-06-18 10:49:20466 
本文实例将实现2自由度并联仿生腿模组运动起来,模拟实现狗腿行走的动作。
2023-06-18 10:35:20296 
万物互联时代,只要需要感知的领域,都需要传感器。MEMS惯性传感器应用到汽车上,就化身成汽车“五官”,实时检测和测量加速度、倾斜、旋转和多自由度运动,精确完成“全天候”定位定向。
2023-06-14 15:43:19459 1. 功能说明 本文示例将实现R328a样机4自由度并联机器狗下蹲的功能。 2. 结构说明 本样机的并联驱动结构与 【R082】4自由度并联四足 类似,两款样机可以
2023-06-09 11:10:51368 
人的手臂(腕关节到肩关节)有几个自由度?我想绝大部分人都没有想过,更别说去了解有哪几个自由度,即使是学工科的人,也未必能解释清楚。没想到知乎上居然有人把这个问题回答的这么专业有内涵,同时又那么有哲理,忍不住想要把这个答案分享一下。
2023-06-07 15:48:16795 
我们对蜂群战术和狼群战术早已并不陌生,无人机蜂群和狼群战术使用也屡见不鲜。而美军对无人机蜂群战术和狼群战术的研究我们也有所涉及,并且相对应地进行借鉴完善,推出了我国自己的无人机战法。
2023-06-01 12:38:091258 随着机器人变得日益成熟,它们已经能够应用到处理越来越多的工业工序。6自由度(6Dof)机器人能够执行复杂的动作,因而可以在许多复杂的工业任务当中展示良好的性能,比如码垛、搬运、涂胶和焊接等。6自由度机器人可以提举和灵活地操纵重型载荷,并通过复杂的几何运动对载荷进行精确操控。
2023-05-18 17:34:21720 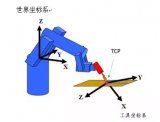
据麦姆斯咨询报道,近期,新纳传感(ACEINNA)宣布高性能惯性测量单元(IMU)IMU330RA全面上市。
2023-04-26 10:21:361140 
基于三维模型的视觉定位通过在查询图像和三维模型间建立 2D-3D 对应关系,估计相机六自由度的位姿。传统的视觉定位方法通常采用人工设计的局部特征,如 SIFT,来实现 2D-3D 匹配,并结合图像检索技术,将匹配范围限制在查询图像的可见区域,以适应大规模场景的需求。
2023-04-20 10:07:05783 ADIS16507-2BMLZ
2023-04-06 23:32:07
EVALBOARDFORADIS16IMU4
2023-03-30 12:04:37
ADIS1613x, ADIS1636x, ADIS16375, ADIS1640x, ADIS1648x - Breakout Board
2023-03-30 12:04:17
BOARD EVALUATION FOR ADIS16260
2023-03-30 11:59:10
10 DOF MEMS IMU SENSOR
2023-03-30 11:58:21
BOARD EVALUATION ADIS16003
2023-03-30 11:58:16
BOARD EVAL FOR ADIS16209
2023-03-30 11:58:02
ADIS16477-2BMLZ
2023-03-29 22:38:30
ADIS16505-2BMLZ
2023-03-29 21:55:00
ADIS16507-3BMLZ
2023-03-29 21:45:10
ADIS16475-3BMLZ
2023-03-29 18:00:02
ADIS16495-3BMLZ
2023-03-29 17:31:43
IMU ACCEL/GYRO/MAG SPI 24ML
2023-03-28 19:37:16
IMU ACCEL/GYRO/MAG SPI 24ML
2023-03-28 19:37:12
ADIS16495-1BMLZ
2023-03-28 18:12:06
ADIS16465-2BMLZ
2023-03-28 14:29:28
ADIS16475-3/PCBZ
2023-03-28 14:28:52
ADIS16470/PCBZ
2023-03-28 13:25:12
ADIS16470AMLZ
2023-03-28 13:23:10
ADIS16475-1BMLZ
2023-03-28 13:22:48
ADIS16467-1BMLZ
2023-03-28 13:11:19
ADIS16467-2BMLZ
2023-03-28 13:11:19
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论