无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶的目标。
据汤森路透知识产权与科技最新报告显示,2010年到 2015年间,与汽车无人驾驶技术相关的发明专利超过22,000件,并且在此过程中,部分企业已崭露头角,成为该领域的行业领导者。
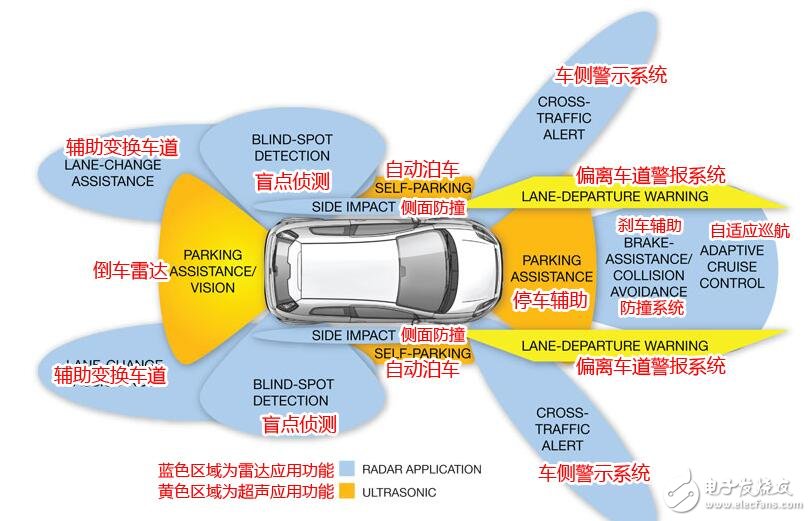
无人驾驶汽车技术图解
二、无人驾驶汽车技术
如同其他很多事物一样,无人驾驶实际上也有一个技术循序渐进发展的过程。无人驾驶也需分为不同阶段。
阶段一:辅助驾驶阶段。车道保持、自适应巡航等辅助驾驶功能,均属于这个阶段的技术,不过驾驶员仍旧是操作主体。
阶段二:半自动驾驶。在这个阶段中,电脑操纵下的自动驾驶已经可以完成前往目的地的过程,其可作为备用系统完成行驶,但受限于法律法规等因素,其仍旧不能作为整个驾驶行为的主体存在。
阶段三:全自动驾驶。技术、成本、法衡去规等因素都不再成为影响普及的因素,电脑控制的系统已经作为驾驶主体而存在,驾驶员也可以随时接管操作系统。
由于技术和法规等的限制,目前的无人驾骆气车大多处于第=阶段。当前主流的无人驾驶汽车技术有激光雷达式和摄像头+;%距雷达式两种。
1、激光雷达式
自上世纪80年代DARPA的ALV项目以来,我们看到的大多数现代自动驾驶原型车上都布满了传感器,并且头顶着一台激光雷达。车辆使用传感器的探测以及激光雷达的三维立体扫描来“感知”周围的世界,而车载控制计算机则像人类大脑一样决定需要进行的操作。Google的无人驾驶汽车就是激光雷达应用的典型代表。
Google算得上是最早跨界进行自动驾驶汽车研发的互联网公司,同时依托着自己独有的地图和大数据计算资源,在这一领域具有领先的优势。由于自身有着地图和街景这样先天的优势,Google自动驾驶车辆使用一台由Velodyne公司提供的64位三维激光雷达将周围环境绘制成一幅3D地图,并与Google的高精度地图相结合,利用计算机以及云端网络进行大数据处理,最终实现自动驾驶功能:
早期的丰田普锐斯原型车搭载了视频摄像头、激光雷达、位置传感器和测距雷达几种传感装置。其中视频摄像头用来判断交通信号灯以及任何移动的物体;激光雷达用于形成真实道路环境的3D地图;测距雷达用于探测车辆周围的障碍物,一旦有物体接近,车辆将自动减速;位于左后轮处的位置传感器用来侦测和估算车辆的侧向位置偏移,以判断车辆在地图上的位置。
在经过多年的试验后,Google推出了自己的无人驾驶原型车。这台原型车上同样搭载了诸多雷达及传感器,以及耸立在车顶上的激光雷达。Google的无人驾驶汽车已经取消了方向盘,汽车完全靠车载计算机进行操控,是目前最接近无人驾驶概念的汽车。
2、摄像头+测距雷达式
奔驰公司在80年代就开始研发无人驾驶技术,在2013年其研发的无人驾驶汽车成功的从斯图加特行驶到法兰克福,行驶里程约100 km。该无人驾驶汽车是在并没有采用激光雷达,而是采用摄像机+测距雷达的组合实现了对周围环境的监测。page_break]
车头两侧的长距雷达可以更早地发现远处的路口;另外的长距雷达监控着车辆前后的交通路况;车身四角的四个短距雷达可迅速侦测到车辆周围的事物以及其他车辆;车前风挡处的摄像机负责识别交通标识,后风挡处的摄像机拍摄街景,通过与导航系统中的地形特点比对和辨别来确定车辆的精确位置。这辆无人驾驶汽车的立体摄像机也进行了相应的改进,从而可以进一步提升探测距离。尽管是一台真正的自动驾驶车辆,但还保留了传统汽车的完整的操作方式。与Google自动驾驶车辆类似,它对于路面障碍的侦测完全来自车辆自身的传感装置。不过,奔驰使用了更加成熟的摄像头组合代替了激光雷达,因此在成本上更容易进行控制,同时也不会破坏现有车辆的外观质感。
奔驰在2015年又推出了新能源自动驾驶概念车F015。奔驰F015概念车利用立体摄像头、雷达以及超声波传感器来获取车辆四周的环境数据,来为自动驾驶提供大量的参考信息。高精度GPS配合三维导航地图,可以确保车辆定位精度达到厘米级别。
三、无人驾驶汽车关键技术
无人驾驶汽车是未来汽车发展的方向,是各种顶尖科技成果为一体的智慧型汽车。就目前发展现状来看,还有以下几个方面的技术OTR需取得突破。
1、传感器技术
现在无人车能出现很大程度上依赖传感器的进步。现在的无人驾驶汽车采用激光雷达,直接感知路面状况,用于分析计算。
2、定位
目前主要的定位系统中美国的GPS应用最为广泛,技术也较为成熟,但目前民用的GPS定位精度远达不到无人车的需求,GPS官方民用定位精度“《10 m”,更高精度的GPS基本要依靠差分完成。差分的原理很简单:设置一个固定基站,固定基站校准位置,再将信号传递给车载设备,车载设备在接收到基站信号和GPS信号后差分获得。但是每一个基站的有效范围也就30 km。于是有很多技术要解决GPS精度不足的问题,如地图匹配。
3、避障
车辆前方有障碍,障碍物是运动的还是静止的,车是停下来还是绕过去。这部分主要的难度是从传感器识别障碍,在车辆运动的前提下,确定障碍的运动状态。也就是说你要在运动的坐标系下,计算另一个物体相对静坐标系的速度,并作出判断。
4、识别
人能轻易识别出道路上的交通标识,如限速牌、红绿灯,同时作出相应的反应,但这对于机器来说是一个困难的挑战。目前的机器视觉技术还难以识别像树木、行人、动物等物体。这些物体的识别都要通过视觉系统完成。在无人车上不但需要能在有限的时间里识别出来,并且还要考虑道路中可能有的光线变化、遮挡等问题。要完善解决这些问题,还需要等待机器视觉和图像识别领域的技术突破。
5、控制
除了上面的避障以外,其他外围机构的改造可能会存在一些改造上的问题。如何介入转向架、如何介入油门。这部分技术的难度较小,汽车控制技术如今已比较成熟,而无人驾驶汽车在未来基本为纯电动汽车,在控制难度上将小于传统的内燃机汽车。
四、无人驾驶汽车技术原理
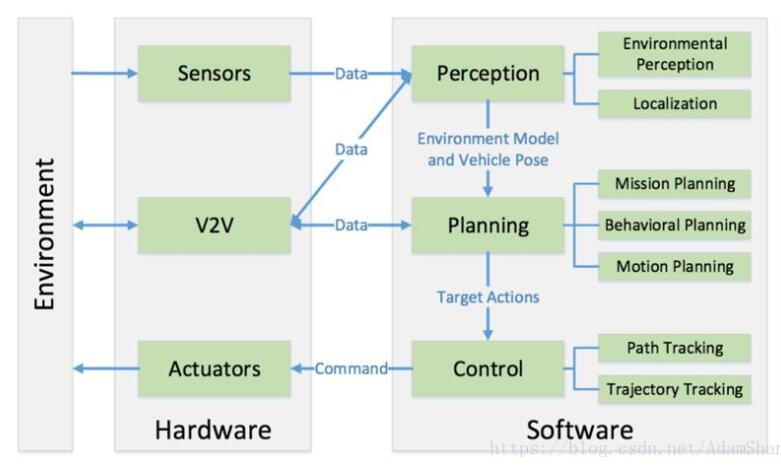
主要依靠车内以计算机系统为主的智能驾驶仪来实现无人驾驶。它一般是利用车载传感器来感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而使车辆能够安全、可靠地在道路上行驶 无人驾驶汽车集自动控制、体系结构、人工智能、视觉计算等众多技术于一体,是计算机科学、模式识别和智能控制技术高度发展的产物。其中制约无人驾驶汽车量产的原因在与激光雷达的价格以及量产。国外的Velodyne供货周期在8周,国内做的好的速腾聚创供货周期在4周。
相关推荐
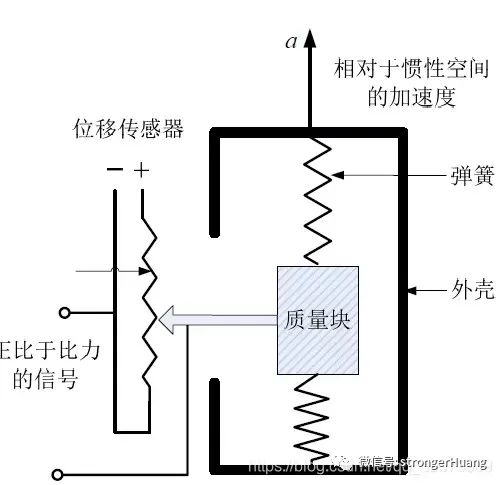
IMU:Inertial Measurement Unit,即惯性测量单元。它是由三轴加速计、三轴陀....
发表于 2023-03-02 10:34•
1418次阅读
深度图像(Depth Images)也被称为距离影像(Range Images),是指将从图像采集器....
发表于 2023-02-10 10:51•
186次阅读

工业系统是一个层层嵌套分割的系统。一个工业企业系统可以分为资源和任务(目标)这两个子系统。
发表于 2022-12-13 10:14•
319次阅读
7月21日,由百度与央视新闻联合举办的2022百度世界大会在线上召开。 大会上,百度最新AI技术成果....
发表于 2022-07-21 09:49•
271次阅读

类脑研究的直观理解是,神经元越多的模型获得的非线性表达能力越强。但不可忽视的是,生物大脑处理信息的强....
发表于 2022-06-21 10:29•
3152次阅读
目前北醒激光雷达产品矩阵已覆盖无人驾驶、大交通(包含轨交、高速公路、民航、航运)、工业传感领域。未来....
发表于 2022-04-16 10:01•
1866次阅读
近日,有媒体爆料消息称OPPO即将正式进军汽车领域,据了解这已经不是OPPO第一次有造车传闻,此前O....
发表于 2021-11-23 16:19•
2263次阅读
无人驾驶汽车的工作原理是什么?无人驾驶汽车包括哪些技术?...
发表于 2021-06-28 07:19•
4503次阅读
这意味着世界上第一部规制无人驾驶车辆的法律的诞生,德国也将成为全球第一个允许完全无人的自动驾驶汽车上....
发表于 2021-06-09 16:08•
1960次阅读
随着无人驾驶汽车在汽车行业中变得越来越重要,传统的卫星导航定位精度大概在10米左右,不足以应对自动驾....
发表于 2021-05-18 15:07•
1947次阅读

无人驾驶车优势:减少事故仅仅是开端
发表于 2021-04-27 15:46•
2550次阅读
人工智能的概念第一次被提出,是在20世纪50年代,距今已六十余年的时间。然而直到近几年,人工智能才迎....
发表于 2021-04-09 10:31•
3286次阅读
近几年,“自动驾驶”这一概念在汽车行业渐渐为人所熟知。但对一辆行驶在马路上的汽车来说,舒适、安全绝对....
发表于 2021-03-12 16:16•
1761次阅读
外国公司曾经主动提出让福耀使用他们先进的玻璃技术,都被曹德旺一口拒绝了。因为在福耀,曹德旺最重视的一....
发表于 2021-03-05 15:01•
18308次阅读
2月23日消息,据国外媒体报道,自动驾驶公司Motional开始在美国的公开道路上对全无人驾驶汽车进....
发表于 2021-02-23 15:52•
1703次阅读
1月29日消息,据媒体报道,无人驾驶出租车在辽宁大连向居民免费开放试乘,这是东北首批无人驾驶出租车。....
发表于 2021-01-29 18:16•
2016次阅读
本文就我们在朝着半自动驾驶和全自动驾驶发展期间出现的汽车电气化趋势,尤其是,为了让电子转向助力(EPS)[font=...
发表于 2021-01-21 06:30•
2087次阅读
据报道,Lyft 和 Motional 将于 2023 年在美国多个城市推出机器人出租车服务。无人驾....
发表于 2020-12-17 10:04•
1433次阅读
随着科技的进步与发展,生活中也随处可见机器人的踪影。机器人主要有轮式、履带式、腿式、跳跃式、蛇形式、....
发表于 2020-11-29 09:52•
1964次阅读
11月19日,中国电信广西公司和上汽通用五菱汽车股份有限公司在自治区党校举行了广西电信5G+新宝骏无....
发表于 2020-11-20 17:30•
2316次阅读
11月20日消息,据国外媒体报道,美国监管机构就如何确保无人驾驶汽车安全,向公众征求建议。
发表于 2020-11-20 11:48•
1764次阅读
无人驾驶汽车自然是人们关注的焦点之一,对于无人驾驶,我国目前已取得一定成就。
发表于 2020-11-18 10:04•
13575次阅读
人工智能已经逐渐走进我们的生活,并应用于各个领域,它不仅给许多行业带来了巨大的经济效益,也为我们的生....
发表于 2020-11-16 11:52•
17498次阅读
无人驾驶的概念已经存在了数十年,随着时间的流逝,它变成了现实。在接下来的十年中,它已成为一种规范,更....
发表于 2020-10-21 16:52•
3153次阅读
无人驾驶汽车经过多年的技术沉淀之后,在当前的大数据、物联网时代获得了更多的关注,无人驾驶目前也被广泛....
发表于 2020-09-08 15:27•
2006次阅读
本文主要阐述了无人驾驶汽车的功能及无人驾驶汽车构造。
发表于 2020-09-01 15:47•
9103次阅读
无人驾驶车需要驾驶证。虽然无人驾驶的定义就是这种车辆在行驶时候不需要驾驶人。但是,在出现无人驾驶汽车....
发表于 2020-09-01 15:41•
3107次阅读
本文主要阐述了无人驾驶汽车的优点与缺点及无人驾驶汽车的未来。
发表于 2020-09-01 15:31•
14485次阅读
随着汽车的联网功能越来越普遍,并不断致力于为驾驶员和乘客提供强大的数字体验,汽车将变得更像微型数据中....
发表于 2020-08-25 18:01•
1643次阅读
在日常生活中实现全自动无人驾驶汽车是件激动人心的梦想。想象一个汽车是真正自动化的世界:你只需上车,告诉车辆你去...
发表于 2020-08-17 07:19•
1517次阅读
目前,中国自动驾驶技术在全球处于领先水平,据今年2月27日美国加州管理局公布的2019年度的自动驾驶....
发表于 2020-06-20 10:22•
3664次阅读
Waymo、Uber等无人驾驶汽车公司都陷入困境,都在争夺无人驾驶汽车市场。如果获得许可,AutoX....
发表于 2019-12-06 16:39•
2759次阅读
应对数据挑战英特尔无人驾驶团队已经部署无人驾驶的数据中心这些独实验室用于算法开发和训练理解无人驾驶数....
发表于 2019-09-10 16:08•
6665次阅读
Tier IV是总部位于日本的无人驾驶汽车软件维护商和供应商,已经开发了一个可靠的软件平台,并成功结....
发表于 2019-08-20 17:26•
7414次阅读
Cube创建了一个安全系统,保护这些无人驾驶车辆不受恶意攻击。与过去只能在被动方式去阻止黑客攻击的方....
发表于 2019-08-13 11:37•
835次阅读
解决"编程两极分化"的问题,打破只有硬件可编程的壁垒,通过提供各种软件定义及硬件优化解决方案,包括业....
发表于 2019-07-30 17:58•
2269次阅读
是什么横亘在我们面前,导致在人工智能高歌猛进的今天,距离自动驾驶的明天,仍相去甚远呢?这其中的重重关....
发表于 2019-06-07 17:09•
12371次阅读
随着高科技越来越发达,AI人工智能应用领域不断扩大,人工智能的到来,无疑是一种跨越式进步的象征
发表于 2019-05-05 17:43•
3231次阅读
本视频主要详细介绍了无人驾驶汽车有哪几款,分别是克莱斯勒Pacifica、特斯拉MODELX、XC9....
发表于 2019-03-04 15:08•
20029次阅读
无人驾驶目前还没有上市,现在只是在规定的路段实验,复杂路段和山路等特殊路段都要经过几年的测试,测试没....
发表于 2019-03-04 15:05•
7558次阅读
本视频主要详细介绍了无人驾驶汽车品牌有哪些,分别是百度、Uber、特斯拉、Delphi、沃尔沃、宝马....
发表于 2019-03-04 15:02•
18606次阅读
据三菱方面介绍,最大的不同点于其系统的“差异化提取”技术,能够自动识别与上次绘制的地图中不同的、或者....
发表于 2019-02-26 13:56•
848次阅读
1月14日,澳大利亚首辆无人驾驶城市列车从悉尼市西北部新建的塔拉旺车站开行36km后顺利抵达查茨伍德....
发表于 2019-01-16 15:59•
2256次阅读
电动平衡车在技术上很成功,但从未达到其支持者所期望的对市场的巨大影响,相反其现在仅仅占有一个很狭窄的....
发表于 2018-12-03 10:46•
2738次阅读
DAPAR大赛一石激起千层浪,刺激了无人驾驶技术和产业的繁荣,直接受益于此的例子就是诞生了谷歌无人驾....
发表于 2018-11-19 09:41•
3780次阅读
近年来,随着深度学习在图像视觉领域的发展,一类基于单纯的深度学习模型的点云目标检测方法被提出和应用,....
发表于 2018-11-05 16:47•
16758次阅读
如果说2015年,多轴无人飞行器、无人驾驶汽车、3D打印机还是人们可以理解的东西,那么进入2018年....
发表于 2018-10-11 09:05•
1119次阅读
无人驾驶汽车革命正在加速发展,但是仍然存在一些障碍。
发表于 2018-10-08 17:10•
6710次阅读
无人驾驶技术面临的挑战还很多,想要获得大众的信任可能还需要很多时间。
发表于 2018-08-31 10:34•
3817次阅读
车内商务初创公司Cargo和Vendy等已开始与打车服务公司合作,在汽车上销售口香糖或耳机等产品。在....
发表于 2018-08-21 10:44•
3825次阅读
在过去八个月中,涉及无人驾驶汽车的各种专利申请已经陆续曝光,其中多数专利在欧洲公开。那段时间里,我们....
发表于 2018-08-16 09:14•
4224次阅读
据福消息报道,科技给我们现代生活的方方面面带来了翻天覆地的变化。在2018年,我们将看到无人驾驶汽车....
发表于 2018-07-12 02:33•
2628次阅读
报道称,世界范围内人工智能(AI)专家的争夺战愈演愈烈,包括无人驾驶汽车、消费者数据分析、语音识别和....
发表于 2018-07-02 01:24•
8611次阅读
作为全球首个为无人驾驶汽车制定法规的州郡,加州在无人驾驶领域的动作总是先人一步,这不,加州无人驾驶汽....
发表于 2018-06-04 09:17•
870次阅读
自从机器人诞生之后,我们心中就存在着巨大的恐惧:奇点,当人工智能和机器人的能力超过人类时,技术发展进....
发表于 2018-06-04 08:10•
4393次阅读
预计在2030年,道路上1/4的汽车都是自动驾驶,但是哪家公司能够率先推出自驾车呢?自驾车是一个产值....
发表于 2018-05-21 09:30•
3518次阅读
雷达对很多人而言并不陌生,但激光雷达可能听到得不多,近年随着谷歌、特斯拉等无人驾驶技术的曝光,激光雷....
发表于 2018-05-19 10:18•
2282次阅读
据外媒报道,芬兰技术研究中心(VTT)推出的无人驾驶汽车——Marilyn在大雾天甚至下雪天拥有出色....
发表于 2018-05-18 14:30•
1769次阅读
最近一项最新的研究使得GPS能够精确到厘米的级别。这项新技术不只是让司机不会在路上迷失方向,同时还是无人驾...
发表于 2017-10-16 11:04•
2686次阅读

 无人驾驶汽车技术_无人驾驶汽车关键技术_无人驾驶汽车技术原理
无人驾驶汽车技术_无人驾驶汽车关键技术_无人驾驶汽车技术原理










 工商网监
工商网监
评论