 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
足式机器人的运动具有足与地面非连续接触的特点,这使得它对不平路面环境的适应性较强,可以应用在探险救灾等危险的任务中。与四足及六足机器人相比,双足机器人足部与地面的接触支撑面积较小,使其具有更高的灵活性和环境适应性,但这也是双足机器人容易跌倒的主要原因之一。本文以液压双足机器人步态规划及柔顺控制为目标,进行以下研究。
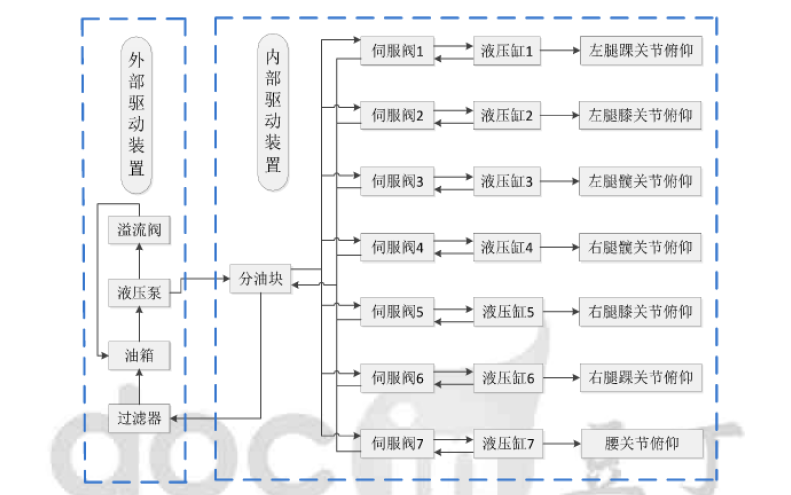
介绍平面液压双足机器人的机械结构和驱动系统,分析双足机器人的运动特点;建立双足机器人单腿的正运动学和逆运动学模型,并根据双腿的特点将运动学模型解耦;分析各关节处的连杆驱动机构,推导并拟合出了各关节角度和对应液压缸伸长量的关系。
研究基于线性倒立摆模型的双足机器人动步态规划方法。通过建立机器人简化的动力学模型,得到质心运动轨迹的表达式;分析双足机器人行走时步长、质心高度以及质心初始速度对运动轨迹的影响;在轨迹规划中引入了移动ZMP理论及双足支撑阶段,完成了机器人起步、中步及止步阶段完整的动态步行运动轨迹的规划。
研究双足机器人的阻抗控制策略。介绍了两种常用的阻抗控制策略;分别建立并分析了液压双足机器人单关节及单腿基于位置的阻抗控制模型;推导了液压双足机器人阻抗控制的实现过程;考虑到双足机器人的作业环境比较复杂,推导了在缺失足端力传感器的条件下实现双足机器人阻抗控制的方法。
在Adams中建立与实际机器人相同尺寸及动力学参数的仿真模型,对机器人起步、中步及止步阶段进行完整的运动仿真。搭建平面液压双足机器人步行实验平台,分别进行单关节和单腿的位置伺服阻抗控制行走实验。实验结果验证步态规划应用在实际机器人中的合理性,并验证了基于位置伺服的阻抗控制算法能减小机器人行走过程中与地面的冲击力,增加了双足机器人足部的柔顺性。
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 基于视觉导航和RBF的移动采摘机器人路径规划研究 19次下载
- 如何实现双足机器人爬楼梯的步态规划与参数优化 26次下载
- 如何进行双足竞步机器人机构和控制系统的设计 12次下载
- 怎么样实现双足机器人参数化步态规划详细方法说明 9次下载
- 如何设计液压式双足机器人运动数据可视化系统 6次下载
- 如何实现双足机器人的步态规划与仿真研究 15次下载
- 异构双足机器人的步态规划和步态识别研究论文说明 15次下载
- 设计双目视觉移动机器人的路径规划和避障系统的研究说明 3次下载
- 如何让双足机器人在非平整地面保持稳定性的控制方法资料说明 14次下载
- 仿壁虎机器人地壁过渡步态规划 1次下载
- 基于STM32的单腿跳跃机器人控制系统研究 1次下载
- 基于Matlab的仿真机器人步态规划和稳定控制仿真 39次下载
- 基于静态平衡的四足机器人斜面步态规划张文宇 3次下载
- 小型仿人机器人的设计及步态规划 38次下载
- 智能机器人路径规划及算法研究 39次下载
- 使用XR806联调控制四足马术机器人 435次阅读
- 机器人技术中常用的路径规划算法的开源库 370次阅读
- 基于仿人机器人的多功能通用型控制系统的设计 1836次阅读
- 机器人控制器有哪些类型_机器人控制器发展 1w次阅读
- 阻抗控制的特点及阻抗控制的实现方法 1.5w次阅读
- 机器人阻抗控制概念 9991次阅读
- 基于51单片机的自动巡线轮式机器人控制系统 3909次阅读
- 液压控制阀的原理及分类 3964次阅读
- 液压机器人的系统介绍和三种新机器人的介绍 1w次阅读
- 基于能自主型机器人足球比赛的仿人机器人研究方案 851次阅读
- 机器人的运动控制的介绍和如何将机器人的运动控制分成4种任务 9727次阅读
- 机器人步态的选择以什么步态移动最节能? 2877次阅读
- 工业机器人虚拟样机系统的研究 1307次阅读
- 如何正确选购扫地机器人之规划式机器人篇 1198次阅读
- 基于DSP的覆冰机器人控制系统研究 568次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1电子电路原理第七版PDF电子教材免费下载
- 0.00 MB | 1497次下载 | 免费
- 2单片机典型实例介绍
- 18.19 MB | 98次下载 | 1 积分
- 3S7-200PLC编程实例详细资料
- 1.17 MB | 27次下载 | 1 积分
- 4笔记本电脑主板的元件识别和讲解说明
- 4.28 MB | 18次下载 | 4 积分
- 5开关电源原理及各功能电路详解
- 0.38 MB | 14次下载 | 免费
- 6100W短波放大电路图
- 0.05 MB | 4次下载 | 3 积分
- 7蓝牙设备在嵌入式领域的广泛应用
- 0.63 MB | 3次下载 | 免费
- 8基于单片机的红外风扇遥控
- 0.23 MB | 3次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 2PADS 9.0 2009最新版 -下载
- 0.00 MB | 66304次下载 | 免费
- 3protel99下载protel99软件下载(中文版)
- 0.00 MB | 51209次下载 | 免费
- 4LabView 8.0 专业版下载 (3CD完整版)
- 0.00 MB | 51043次下载 | 免费
- 5555集成电路应用800例(新编版)
- 0.00 MB | 33564次下载 | 免费
- 6接口电路图大全
- 未知 | 30321次下载 | 免费
- 7Multisim 10下载Multisim 10 中文版
- 0.00 MB | 28588次下载 | 免费
- 8开关电源设计实例指南
- 未知 | 21540次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537793次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420026次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191183次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183278次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138039次下载 | 免费





 工商网监
工商网监
评论