 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
全国大学生智能汽车竞赛是一个涉及控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科的科技创意性比赛。经过几个月的努力,我们使用竞赛秘书处统一指定的竞赛车模套件,采用飞思卡尔半导体公司的16 位微控制器MC9S12DG128B 单片机作为核心控制单元,自主构思控制方案进行系统设计,完成了智能车的制作和调试。
飞思卡尔智能车比赛的赛道,由白色泡沫材料及其中心的黑色引导线组成,对赛道信息捕获的效果好坏,直接决定着智能车的速度及控制性能。通常采用的路径检测方式,不外乎CCD 与光电两种。CCD 方案具有先天的优势,不仅能得到前方赛道的丰富信息,而且可实现远距离的前瞻,对车模重量及稳定性的影响也很小;而光电方案受传感器数量、车模重量及稳定性所限,获得的赛道信息十分有限,前瞻距离也不足,使得使用光电管方案的队伍成绩普遍不如使用CCD方案的队伍。
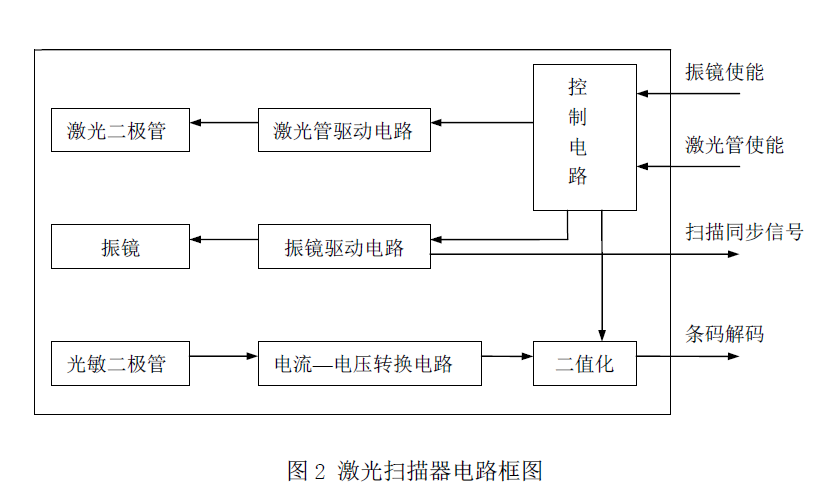
为得到大前瞻、连续性好的信息,我们在赛车中使用了激光扫描器,它利用快速摆动(或旋转)的镜面,反射能量高度集中的激光束,使激光束的出射角度随着反射镜的运动产生连续的变化,从而投射出一条扫描线。虽然只有一个光电检测器和一个光源,但由于反射镜的高扫描频率,使得扫描器几乎可以同时得到一行的图像信息。而控制算法中,速度控制采取分区间不同速度控制,舵机采取简单的PD 控制
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- github上的pytorch学习资料详细说明 6次下载
- Xilinx的时序设计与约束资料详细说明 32次下载
- 时序分析的优化策略详细说明 17次下载
- 时序分析的优化策略详细说明 19次下载
- PLC的39个应用案例详细说明 67次下载
- Python的知识点总结详细说明 14次下载
- 如何使用Python绘制PDF文件教程详细说明 12次下载
- 汽车构造ECU的硬件设计详细说明 14次下载
- 网络存储技术的存储协议详细说明 15次下载
- 西门子PLC位指令的教程详细说明 24次下载
- 多旋翼飞行器的可观性和卡尔曼滤波教程详细说明 1次下载
- I2C总线的规范详细说明 16次下载
- Matlab图形绘制经典案例详细说明 7次下载
- 卡尔曼滤波在单片机上的使用资料和程序详细说明 40次下载
- 八种常见汽车悬挂系统详细说明 17次下载
- 卡尔曼滤波家族 436次阅读
- 卡尔曼滤波器原理分析 600次阅读
- PIC系列单片机程序设计基础知识详细说明 3791次阅读
- C语言和C++的特点与用法详细说明 3968次阅读
- FPGA的入门基础知识详细说明 8664次阅读
- 无人驾驶汽车的发展前景详细说明 1.3w次阅读
- 使用AT89S51单片机制作红外遥控器的资料和源代码详细说明 5263次阅读
- 光刻技术的原理详细说明 2w次阅读
- 常用稳压二极管的参数表格详细说明 1.2w次阅读
- 如何在单片机上实现卡尔曼滤波详细计算方法和程序概述 1.2w次阅读
- 电气电缆的最全常用手册详细说明 8081次阅读
- 智能安防监控系统方案介绍 4.1w次阅读
- 接收卡升级的详细说明概述图文详解 2.2w次阅读
- 基于AD9854产生MSK调制信号详细说明 4375次阅读
- 音响功放接线图解及详细说明 91.6w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1电子电路原理第七版PDF电子教材免费下载
- 0.00 MB | 1497次下载 | 免费
- 2单片机典型实例介绍
- 18.19 MB | 98次下载 | 1 积分
- 3S7-200PLC编程实例详细资料
- 1.17 MB | 27次下载 | 1 积分
- 4笔记本电脑主板的元件识别和讲解说明
- 4.28 MB | 18次下载 | 4 积分
- 5开关电源原理及各功能电路详解
- 0.38 MB | 14次下载 | 免费
- 6100W短波放大电路图
- 0.05 MB | 4次下载 | 3 积分
- 7蓝牙设备在嵌入式领域的广泛应用
- 0.63 MB | 3次下载 | 免费
- 8基于单片机的红外风扇遥控
- 0.23 MB | 3次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 2PADS 9.0 2009最新版 -下载
- 0.00 MB | 66304次下载 | 免费
- 3protel99下载protel99软件下载(中文版)
- 0.00 MB | 51209次下载 | 免费
- 4LabView 8.0 专业版下载 (3CD完整版)
- 0.00 MB | 51043次下载 | 免费
- 5555集成电路应用800例(新编版)
- 0.00 MB | 33564次下载 | 免费
- 6接口电路图大全
- 未知 | 30321次下载 | 免费
- 7Multisim 10下载Multisim 10 中文版
- 0.00 MB | 28588次下载 | 免费
- 8开关电源设计实例指南
- 未知 | 21540次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537793次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420026次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191183次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183278次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138039次下载 | 免费





 工商网监
工商网监
评论