 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
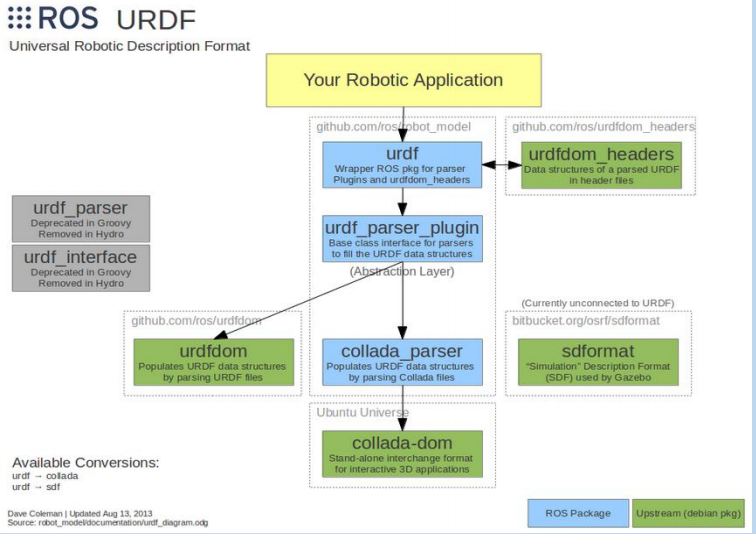
URDF ( Unified Robot Description Format )直接的翻译就是“统一机器人描述格式”,是一种特殊的xm|文件格式,作为机器人的一种通用使用的描述文件。 ROS中的urdf功能包包含一- 个URDF的C++解析器,这样大家各自通过统一的编码格式设计的机器人模型可以通过统的解析 器进行解析,这样的机器人可视化模型方便大家进行互相交流。
URDF创造的机器,人模型包含的内容有:连杆link、 关节joint, 运动学参数axis,动力学参数dynamics、 可视化模型visual、碰撞检测模型collision等,在ROS里面大量使用。接触ROS比较久的同学,应该会经常见到一种类似命名的包(package) - XXx_ description. 这个包里面就是包含某个机器人的描述文件。比如turtlebot_ decription, baxter. descrition,以及ur_ description等。
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 一个机器人操作系统(ROS)节点系统 0次下载
- 使用EASE和ROS遥控机器人 0次下载
- 从ROS控制jetbot机器人 0次下载
- 基于ROS的机器人本体控制器 1次下载
- 基于树莓派2B的ROS机器人 1次下载
- 基于运行ROS的机器人 2次下载
- 瑞萨电子与 eProsima 合作,将微型 ROS 移植到机器人的 RA MCU 中 9次下载
- ROS学习笔记之七:ROSSerial初试 9次下载
- 怎么样才能使用ROS系统实现机器人视觉导航识别算法的设计 18次下载
- 六足机器人SolidWorks的模型资料合集免费下载 47次下载
- 基于Scratch和ROS的教育机器人编程与实现 10次下载
- ROS教程之ROS机器人操作系统基础知识概述资料免费下载 18次下载
- ROS机器人软件平台有哪些常用命令?ROS的常见命令详细资料免费下载 20次下载
- ROS机器人程序设计电子教材中文版本免费下载 0次下载
- ROS是什么?机器人操作系统ROS的介绍 14次下载
- ROS机器人如何使用Navigation导航包实现实时定位 1137次阅读
- ROS系统读取USB相机图像数据 313次阅读
- ROS部署PaddlePaddle的CV模型 265次阅读
- NVIDIA Isaac ROS Developer Preview 3,用于构建高性能机器人应用 323次阅读
- 用于ROS移动机器人高集成电源解决方案(一) 766次阅读
- ROS移动机器人的通信接口电路设计 873次阅读
- ROS移动机器人中常用的编码器 1092次阅读
- ROS机器人中直流电机控制原理与驱动电路设计 1043次阅读
- ROS移动机器人中常用的两种电机 1093次阅读
- ROS完成ROS和ROS2中各个组件向openEuler的适配 1330次阅读
- ROS2+OpenVINO™ 实践教程 2107次阅读
- 【自适应计算在机器人领域的应用】连载七:用ROS 2在机器人内部集成自适应计算的新架构 2123次阅读
- RT-Thread如何使用串口或者无线和ROS连接 4946次阅读
- fireflyROC-RK3308主板ROS简介 3207次阅读
- ROS程序是如何控制伺服机的 所有答案尽在本文 2850次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1电子电路原理第七版PDF电子教材免费下载
- 0.00 MB | 1497次下载 | 免费
- 2单片机典型实例介绍
- 18.19 MB | 98次下载 | 1 积分
- 3S7-200PLC编程实例详细资料
- 1.17 MB | 27次下载 | 1 积分
- 4笔记本电脑主板的元件识别和讲解说明
- 4.28 MB | 18次下载 | 4 积分
- 5开关电源原理及各功能电路详解
- 0.38 MB | 14次下载 | 免费
- 6100W短波放大电路图
- 0.05 MB | 4次下载 | 3 积分
- 7蓝牙设备在嵌入式领域的广泛应用
- 0.63 MB | 3次下载 | 免费
- 8基于单片机的红外风扇遥控
- 0.23 MB | 3次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 2PADS 9.0 2009最新版 -下载
- 0.00 MB | 66304次下载 | 免费
- 3protel99下载protel99软件下载(中文版)
- 0.00 MB | 51209次下载 | 免费
- 4LabView 8.0 专业版下载 (3CD完整版)
- 0.00 MB | 51043次下载 | 免费
- 5555集成电路应用800例(新编版)
- 0.00 MB | 33564次下载 | 免费
- 6接口电路图大全
- 未知 | 30321次下载 | 免费
- 7Multisim 10下载Multisim 10 中文版
- 0.00 MB | 28588次下载 | 免费
- 8开关电源设计实例指南
- 未知 | 21540次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537793次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420026次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191183次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183278次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138039次下载 | 免费





 工商网监
工商网监
评论