 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
电子、信息和通信技术的迅速发展(导致计算机、传感器和网络性能的小型化和提高)导致了几种自动车辆(AV)技术的发展[1]车辆,如汽车或卡车,其中人类驾驶员从未被要求控制以安全操作车辆。也被称为自主或“无人驾驶”汽车,它们结合传感器和软件来控制、导航和驾驶汽车。“对Thrun[3]来说,AV是“一种无人机,能够感知其环境并在无需人工输入的情况下导航”。然而,讨论自主汽车的标准方法是交谈关于汽车工程师学会(SAE)定义的“自动驾驶水平”。汽车工程师学会(SAE)是一个汽车标准化机构,它将汽车的自动驾驶能力划分为六个水平,从最基本的系统到100%的自动驾驶。这些水平有助于衡量某款自主汽车的技术有多先进。这开辟了许多研究和发展领域,尽管这些领域最终是相互关联的,但却对应着非常多样化的领域。
在这一演变的同时,为测试视听功能而制定的过程和程序(功能要求和规定)也在过去几十年中得到了发展和确立。然而,有人担心这种技术可能产生的后果,特别是对人身安全、可能导致撞车的机械故障以及这种事故的费用。为了保证AV的安全性和降低成本,必须对不同的场景进行建模和测试。自主车辆的系统测试可以在仿真环境中进行,也可以在物理环境中进行。物理测试提供真实的测试场景,工程师可以使用实际的车辆而不是模型。然而,法规限制了这些车辆在城市中的使用;因此,要使用真正的AVs进行测试,需要使用昂贵的硬件和现场测试,这需要花费相当长的时间。根据最近发表的报告[5,6],不可能在合理的时间范围内进行验证自主汽车安全性的经验现场试验。在这种情况下,模拟、建模和测试有可能填补这一空白,并使严格、可控和及时的评估视听系统成为可能。
研究界认识到三种类型的模拟〔7〕:实弹、虚拟和构造(LVC),实弹模拟只是一种作战测试,使用传感器识别哪些系统已被模拟射击、实弹部队和实弹设备损坏。这是最接近实际使用的练习。虚拟仿真(“X-in-the-loop”)可以用计算机或其他人工生成的刺激来测试完整的系统原型。这种锻炼是典型的发育测试。构造性仿真是一个或多个系统的计算机专用表示。因此,模拟可以从操作测试到完全由计算机生成的系统对多个输入的反应表示(即不涉及系统组件)。它可以用于以下几个目的:(1)操作和开发测试的设计和评估;(2) 模拟,考虑到系统聚合的级别、系统单个组件(例如,系统软件)的建模级别或系统作为一个整体的建模级别,以建模一个完整的原型并建模多个系统交互(即雷达组件与系统)
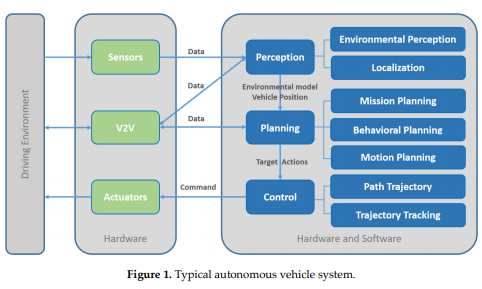
然而,正如在第8条中所揭示的,首先要考虑的是可以通过仿真测试的特性或系统的类型(见图1)。在这项工作中,我们将注意力集中在自主车辆的感知上,提供更大的自主性和复杂性,强调它们的子系统(9):环境感知和定位。
- 自动驾驶仿真平台概述 0次下载
- 自动驾驶仿真工具 1次下载
- 基于dSPACE半实物仿真平台设计 26次下载
- 基于dSPACE半实物仿真平台的设计 10次下载
- 基于dSPACE半实物仿真平台的设计总结 10次下载
- 数字信号处理虚拟试验仿真平台方案 5次下载
- 一个自动驾驶出租车动态合乘的仿真系统 12次下载
- 使用Proteus进行一个仿真实例的详细资料说明 12次下载
- ANT和蓝牙健康与健身聚合平台系统如何相结合的详细资料概述 3次下载
- 基于锂离子的电池和充电器设计研究的详细资料概述 21次下载
- 电子时钟的程序和仿真的详细资料概述 26次下载
- 超声波测距的23篇论文的详细资料概述主要是基于单片机的 16次下载
- 自动小车存取系统三维仿真平台研究_吴梅 0次下载
- MEMS降阶宏模型仿真平台研究 14次下载
- EPA产品开发仿真平台研究与开发 22次下载
- 自动驾驶领域的数据集汇总 209次阅读
- 什么是eNSP?华为网络仿真平台eNSP的使用方法 7758次阅读
- ROV水下作业仿真平台:龚嘴水电站坝体检测和清理作业仿真 1199次阅读
- 库卡机器人模拟量输入输出编程的详细资料概述 6124次阅读
- 高精地图在自动驾驶中的应用详细资料分析 4907次阅读
- 中国自动驾驶发展如何2018中国自动驾驶市场专题分析详细资料概述 4507次阅读
- 从四个方面详细解析自动驾驶感知环节 9445次阅读
- 自动驾驶的概述、技术、人才、应用和趋势 1w次阅读
- 自动驾驶领域的人车交互 4474次阅读
- 开关电源的正激变换器基本工作原理及元器件如何选择等详细资料概述 1.1w次阅读
- PLC常用基本环节梯形图和详细文字说明详细资料概述 7782次阅读
- 变压器保护的基本要求,保护配置和运行规定的详细资料概述 7153次阅读
- 自动驾驶汽车硬件系统概述 7513次阅读
- 采用热成像读取技术提高自动驾驶的安全性详细资料概述 5258次阅读
- 自动驾驶汽车硬件与软件详细介绍 1w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1电子电路原理第七版PDF电子教材免费下载
- 0.00 MB | 1491次下载 | 免费
- 2单片机典型实例介绍
- 18.19 MB | 95次下载 | 1 积分
- 3S7-200PLC编程实例详细资料
- 1.17 MB | 27次下载 | 1 积分
- 4笔记本电脑主板的元件识别和讲解说明
- 4.28 MB | 18次下载 | 4 积分
- 5开关电源原理及各功能电路详解
- 0.38 MB | 11次下载 | 免费
- 6100W短波放大电路图
- 0.05 MB | 4次下载 | 3 积分
- 7基于单片机和 SG3525的程控开关电源设计
- 0.23 MB | 4次下载 | 免费
- 8基于AT89C2051/4051单片机编程器的实验
- 0.11 MB | 4次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 2PADS 9.0 2009最新版 -下载
- 0.00 MB | 66304次下载 | 免费
- 3protel99下载protel99软件下载(中文版)
- 0.00 MB | 51209次下载 | 免费
- 4LabView 8.0 专业版下载 (3CD完整版)
- 0.00 MB | 51043次下载 | 免费
- 5555集成电路应用800例(新编版)
- 0.00 MB | 33562次下载 | 免费
- 6接口电路图大全
- 未知 | 30320次下载 | 免费
- 7Multisim 10下载Multisim 10 中文版
- 0.00 MB | 28588次下载 | 免费
- 8开关电源设计实例指南
- 未知 | 21539次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935053次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537793次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420026次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191183次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183277次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138039次下载 | 免费





 工商网监
工商网监
评论