















资料详情
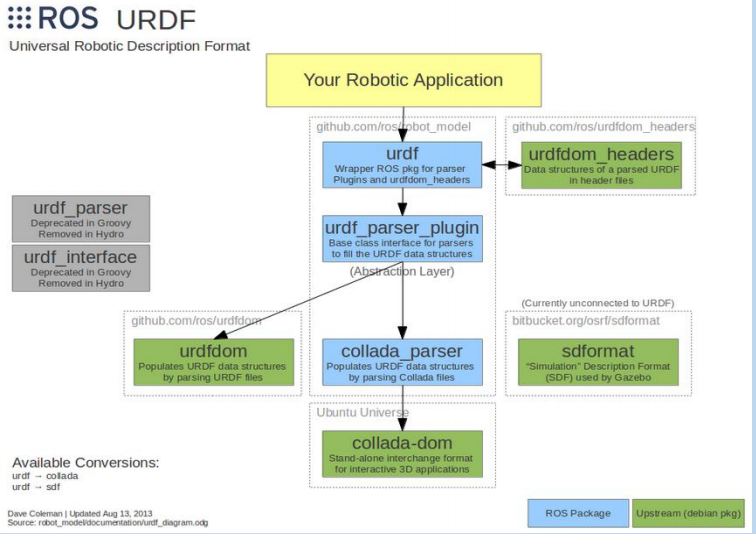
URDF ( Unified Robot Description Format )直接的翻译就是“统一机器人描述格式”,是一种特殊的xm|文件格式,作为机器人的一种通用使用的描述文件。 ROS中的urdf功能包包含一- 个URDF的C++解析器,这样大家各自通过统一的编码格式设计的机器人模型可以通过统的解析 器进行解析,这样的机器人可视化模型方便大家进行互相交流。
URDF创造的机器,人模型包含的内容有:连杆link、 关节joint, 运动学参数axis,动力学参数dynamics、 可视化模型visual、碰撞检测模型collision等,在ROS里面大量使用。接触ROS比较久的同学,应该会经常见到一种类似命名的包(package) - XXx_ descripTIon. 这个包里面就是包含某个机器人的描述文件。比如turtlebot_ decripTIon, baxter. descriTIon,以及ur_ descripTIon等。


用户评论(0)