 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
本文设计自动导航插秧机的电控转向机构、油门控制机构与刹车控制机构。电控转向机构由直流减速电机驱动,带动齿轮使方向盘自动转动,转动角度由编码器测出。油门控制机构与刹车控制机构均采用油缸驱动方式。本文对轴、齿轮离合器和轴承进行了设计与校核,这种装置可以大大提高农业生产率,减少人力资源的消耗,推动了农业高精机械化的发展。
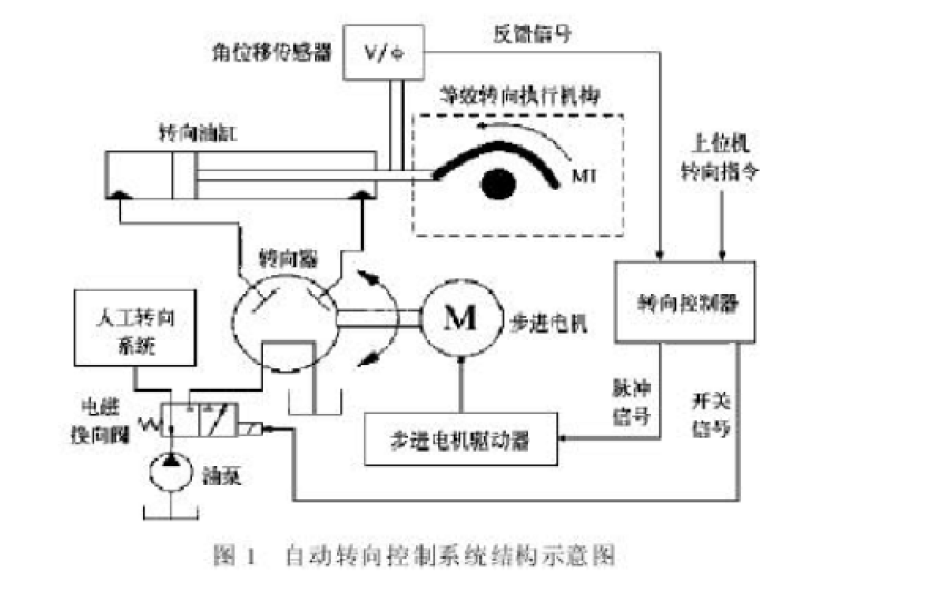
自动转向是智能车辆的一项关键技术,它可以自动地调整智能车辆的横向位置,实现对自动驾驶车辆的横向控制,是实现自动导航控制的基础。智能车辆使用最多的自动转向方式有两种,一种是电液控制转向系统如美国伊利诺斯州立大学通过对拖拉机转向系统进行改造,设计了一种电液操控系统以实现转向控制,系统主要由液压泵、三位四通电液比例方向控制阀、PWM电液阀驱动器和转向油缸等组成。另一种是控制电动机带动方向盘转动实现转向操作,如日本岩手大学研制的自动驾驶拖拉机,采用步进电机通过链条传动带动方向盘转动实现转向操作,中国农业大学魏延富博士研制了一套转向控制系统,由步进电机通过齿轮驱动方向盘实现转向。
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- PCB叠层结构设计详解
- O型圈密封结构设计 16次下载
- 《抑制开关磁阻电机振动的结构设计研究》pdf 3次下载
- XDNZ630型水稻插秧机GPS自动导航系统的详细资料说明 8次下载
- 交通灯设计实验的论文详细说明 7次下载
- LCD电视结构设计及电子设计新标准的资料说明 2次下载
- 高压Trench IGBT的结构设计和工艺设计和制作说明 29次下载
- C语言教程之使用顺序结构设计C语言程序的详细资料说明 11次下载
- 数据库概念结构是如何设计的概念结构设计资料概述 22次下载
- 基于BRF的自动插秧机电气控制系统 0次下载
- 3D3S钢结构设计 0次下载
- 半替代护环的结构设计 0次下载
- 轮辐转子的结构设计 0次下载
- 手机结构设计手册 0次下载
- 结构设计方面资料 0次下载
- 自动驾驶领域的数据集汇总 209次阅读
- 机械结构设计解决方案 550次阅读
- 基于ML的异构金属材料结构设计及性能预测 667次阅读
- Tesla充电口结构设计的变化 587次阅读
- 离子柔性传感器在传感机理、组成、结构设计论文 2040次阅读
- FPGA的入门基础知识详细说明 8664次阅读
- 自动驾驶系统的原理和结构讲解 1.3w次阅读
- 变频电动机结构设计注意事项 3614次阅读
- 气体报警控制器产品结构设计中的EMC缺陷分析 887次阅读
- 自动驾驶领域的人车交互 4474次阅读
- 农业又现黑科技!无人机在农业生产中的如鱼得水 2535次阅读
- PLC电气控制柜接线_PLC电气控制柜的布局与结构设计 6w次阅读
- 几类器件慎重采用串并联结构设计 6598次阅读
- 浅谈面板灯结构设计及注意事项 3164次阅读
- ADSS光缆结构设计与施工问题的探讨 2267次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1电子电路原理第七版PDF电子教材免费下载
- 0.00 MB | 1491次下载 | 免费
- 2单片机典型实例介绍
- 18.19 MB | 95次下载 | 1 积分
- 3S7-200PLC编程实例详细资料
- 1.17 MB | 27次下载 | 1 积分
- 4笔记本电脑主板的元件识别和讲解说明
- 4.28 MB | 18次下载 | 4 积分
- 5开关电源原理及各功能电路详解
- 0.38 MB | 11次下载 | 免费
- 6100W短波放大电路图
- 0.05 MB | 4次下载 | 3 积分
- 7基于单片机和 SG3525的程控开关电源设计
- 0.23 MB | 4次下载 | 免费
- 8基于AT89C2051/4051单片机编程器的实验
- 0.11 MB | 4次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 2PADS 9.0 2009最新版 -下载
- 0.00 MB | 66304次下载 | 免费
- 3protel99下载protel99软件下载(中文版)
- 0.00 MB | 51209次下载 | 免费
- 4LabView 8.0 专业版下载 (3CD完整版)
- 0.00 MB | 51043次下载 | 免费
- 5555集成电路应用800例(新编版)
- 0.00 MB | 33562次下载 | 免费
- 6接口电路图大全
- 未知 | 30320次下载 | 免费
- 7Multisim 10下载Multisim 10 中文版
- 0.00 MB | 28588次下载 | 免费
- 8开关电源设计实例指南
- 未知 | 21539次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935053次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537793次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420026次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191183次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183277次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138039次下载 | 免费





 工商网监
工商网监
评论