 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
视觉导航是采用CCD 摄像头拍摄路面图像,运用机器视觉等相关技术识别路径,实现自动导航的一种新兴导航方法。
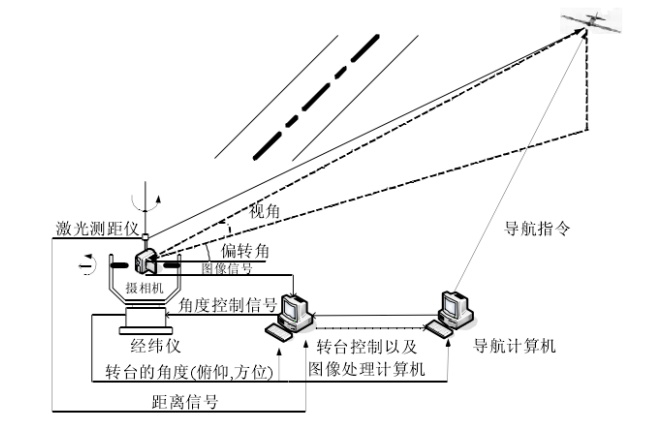
本文所要解决的主要问题是如何通过图像跟踪的方法来获取飞机的坐标(x, y, z),因此对于导航中所要解决的姿态角的获取问题将不做讨论。由于采用图像跟踪技术实现的导航和眼睛观察目标然后定位的原理相似,因此也称该导航方法为视觉导航。
本文的视觉导航系统,考虑到机载图像采集装置的可维护性及成本等因素,故把图像传感器安装地面跟踪系统上,从而实现地面导航。
引自:《无人机自动着陆过程中的视觉导航技术研究》
资料一:
下面对由转角得到具体的空间位置展开讨论,即视觉导航原理。
2.4.2 地面坐标系的建立
要获取飞机在固定坐标系中的坐标,首先要建立这个坐标系,其目的是为了获取飞机的绝对位置,为了配合第四章的摄像机坐标系变换,本文采用的坐标是以无人机降落的跑道为z轴,飞机跑道上某点为原点建立坐标系,以下称该坐标系为地面坐标系,如图2.7所示。
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 机器人操作系统EtherCAT技术研究综述 1次下载
- 嵌入式双目视觉系统和三维重建技术研究 7次下载
- 移动通信中的软件无线电技术研究 5次下载
- STM32微控制器的可靠串口通信技术研究资料下载 7次下载
- STM32单片机多串口通信仿真测试技术研究资料下载 13次下载
- 4/5G协同优化方法的研究资料下载 2次下载
- 串联变换器研究资料下载 8次下载
- 人体通信技术研究 22次下载
- 农业机械自动导航技术研究进展 35次下载
- 视觉导航技术的详细资料概述 8次下载
- 视觉导航的关键技术和应用的详细资料说明 17次下载
- 基于DSP的指纹识别系统研究资料下载.pdf 14次下载
- RCC电路间歇振荡的研究资料 0次下载
- 光纤通信复用技术的研究资料 12次下载
- 嵌入式视觉运动目标跟踪技术研究 18次下载
- 水下仿生光磁导航技术的发展趋势探讨 268次阅读
- 基于机器视觉的表面缺陷检测技术研究 337次阅读
- 5G通信FBAR滤波器镀膜关键技术研究 393次阅读
- 智能网联汽车多域电子电气架构技术研究 659次阅读
- 量子计算关键技术研究进展 852次阅读
- 视觉语言导航领域任务、方法和未来方向的综述 2621次阅读
- 对于UWB技术基础详解 8.6w次阅读
- 视觉信息如何辅助激光导航AGV的应用 4618次阅读
- 视觉SLAM的技术资料总结 4898次阅读
- 机器人视觉伺服系统技术的介绍及发展历程的详细资料说明 3428次阅读
- 浅谈微波线性功放的技术研究 1413次阅读
- 基于FPGA的视觉导航小车设计与实现 3892次阅读
- 图像处理基本算法-立体视觉 5176次阅读
- PCB反向技术中的反推原理图研究 2637次阅读
- 汽车动力传动系统一体化智能控制技术研究 1364次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1电子电路原理第七版PDF电子教材免费下载
- 0.00 MB | 1491次下载 | 免费
- 2单片机典型实例介绍
- 18.19 MB | 95次下载 | 1 积分
- 3S7-200PLC编程实例详细资料
- 1.17 MB | 27次下载 | 1 积分
- 4笔记本电脑主板的元件识别和讲解说明
- 4.28 MB | 18次下载 | 4 积分
- 5开关电源原理及各功能电路详解
- 0.38 MB | 11次下载 | 免费
- 6100W短波放大电路图
- 0.05 MB | 4次下载 | 3 积分
- 7基于单片机和 SG3525的程控开关电源设计
- 0.23 MB | 4次下载 | 免费
- 8基于AT89C2051/4051单片机编程器的实验
- 0.11 MB | 4次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 2PADS 9.0 2009最新版 -下载
- 0.00 MB | 66304次下载 | 免费
- 3protel99下载protel99软件下载(中文版)
- 0.00 MB | 51209次下载 | 免费
- 4LabView 8.0 专业版下载 (3CD完整版)
- 0.00 MB | 51043次下载 | 免费
- 5555集成电路应用800例(新编版)
- 0.00 MB | 33562次下载 | 免费
- 6接口电路图大全
- 未知 | 30320次下载 | 免费
- 7Multisim 10下载Multisim 10 中文版
- 0.00 MB | 28588次下载 | 免费
- 8开关电源设计实例指南
- 未知 | 21539次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935053次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537793次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420026次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191183次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183277次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138039次下载 | 免费





 工商网监
工商网监
评论