 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
提出了一种基于单神经元自适应控制的压电陶瓷驱动器迟滞补偿方法。对于给定的期望轨迹,利用Hebb学习规则,根据实际轨迹和期望轨迹之间的误差动态调整PEA的控制输入。具有自学习和自适应能力的单神经元是一个非线性处理单元,非常适合于时变系统。基于单神经元控制,PEA的迟滞补偿可以看作是传递生物神经元信息的过程。通过实际轨迹与期望轨迹之间的误差信息,采用神经元学习的权值调整方法对控制输入进行调整。此外,本文还将Hebb学习规则和监督学习相结合作为教师信号,能够快速响应控制信号。单神经元控制器的权值可以在线不断调整,以提高系统的控制性能。实验结果表明,所提出的单神经元自适应迟滞补偿方法能够很好地跟踪连续和不连续的轨迹。单神经元自适应控制器具有较好的自适应和自学习性能,克服了PEA滞后的速率依赖性。
压电作动器(PEAs)作为一种亚纳米分辨率的驱动器件,在需要纳米级精确运动的各种应用中得到了广泛的应用[1–4],但PEA固有的迟滞非线性大大降低了其定位精度,影响了其在精密定位中的适用性和性能操作任务。PEA迟滞最显著的特征是速率依赖性和不对称性[5-7],即迟滞环随着输入速率(或频率)的增加而变厚,且迟滞环的中心不对称。这些特性增加了系统的复杂性,给迟滞建模和补偿带来很大困难。为了解决上述问题,人们提出了许多控制方法来表征和补偿PEA的迟滞特性。物理模型可以从物理测量方法中导出,如磁化、应力应变和能量原理[8,9],但是数学表示往往很复杂,很难得到逆磁滞模型。同时,还提出了一种基于现象的模型,如Preisach模型〔10〕、Prandtl-Ishlinskii(PI)模型〔11,12〕、Maxwell模型〔13〕,由于经典PI模型的反演在理论上是可行的,因此在许多研究中被广泛应用于描述磁滞特性豌豆。在得到逆模型后,可以将其作为一个前馈滞环补偿器。这种建模和反演方法被广泛采用,许多自适应方法都可以集成〔14–17〕,为了避免反演计算,还提出了直接反演方法(DIM),直接从参数辨识中的测量值中识别出逆迟滞模型〔18–20〕
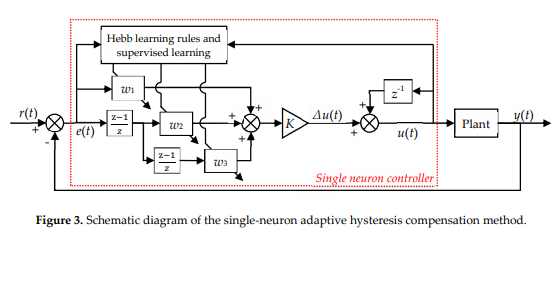
对于基于模型的迟滞补偿,控制器的性能在很大程度上取决于迟滞模型的建模精度。然而,PEA的迟滞特性受许多因素的影响,例如外部负载和控制输入的频率。这使得PEA迟滞的建模和补偿非常敏感。因此,通常很难获得高精度的迟滞模型。因此,为了获得更高的鲁棒性和适应性,人们提出了许多智能控制算法。例如,为了提高系统对噪声和干扰的控制精度和鲁棒性,提出了一种滑模控制方法〔14,21〕,并提出了一种具有前馈滞环补偿和比例积分微分(PID)反馈的线性化控制方法〔22〕,此外,还提出了迭代学习控制方法在智能控制领域,神经网络是一种功能强大的系统辨识工具。它具有很强的自学习能力和对非线性系统的映射能力,在复杂系统的控制中得到了广泛的应用[24,25]基于动态线性化多层前向神经网络模型,提出了无逆预测控制器〔27〕,并提出了小脑模型关节控制器神经网络PID控制器〔4〕,采用径向基函数(RBF)网络对PEA的滞后进行建模和补偿〔28〕。然而,S型作用函数的使用增加了快速、高频和快速响应系统(如PEA)的计算难度。在基于神经网络的控制器中,单神经元自适应系统保留了神经网络的优点,能够满足快速过程实时控制的要求[29,30],因此,本文提出了一种单神经元自适应迟滞补偿方法。该控制器模仿自适应单神经元系统学习,采用Hebb学习规则和有监督学习对控制器进行调整。该控制器能对时变信号做出快速响应,适用于速率相关的滞环补偿。通过定位和轨迹跟踪实验,研究了该方法的性能。为了比较,还研究了PID控制的性能。对于定位控制,该方法可以在8ms内收敛,稳态跟踪误差可以降低到系统的噪声水平。对于轨迹跟踪,使用频率高达50赫兹的正弦和三角形轨迹。实验结果表明,该方法对PEA迟滞的速率依赖性具有很好的鲁棒性和适应性,能够很好地补偿迟滞。本文主要内容如下:第二节介绍了PEA的固有磁滞特性。第三节介绍了单神经元自适应控制器的设计与分析。为了研究该方法的有效性,第4节提供了实验验证和性能分析。第五节对本文进行了总结。
- 压电陶瓷驱动器单神经元自适应磁滞补偿实验 0次下载
- 压电自适应桁架结构智能振动 6次下载
- 带延迟调整的脉冲神经元学习算法 12次下载
- 神经网络自适应控制及其发展应用 11次下载
- 如何使用阈值自适应忆阻器Hopfield神经网络进行关联规则挖掘算法 5次下载
- 基于非联合型学习机制的学习神经元模型 0次下载
- 基于单神经元自适应PSD的汽包液位控制_常杰锋 0次下载
- 基于WLAN与单神经元自适应PID的空调系统设计 23次下载
- 单神经元PID控制的吊车防摆定位系统 27次下载
- 神经PID控制基础 26次下载
- 一种自适应迟滞性比较器的设计 80次下载
- 自适应线性神经元方法同轴相对论返波管高频特性的数值分析 17次下载
- 单神经元自适应PID控制在电动油门控制中的应用 22次下载
- 单神经元自适应PID控制器设计方法研究 36次下载
- 自适应模糊神经网络研究 18次下载
- 一种具有高度柔性与可塑性的超香肠覆盖式神经元模型 188次阅读
- 什么是脉冲时序依赖可塑性STDP呢 3808次阅读
- 基于单个自适应神经元的非模型直接控制方法在汽车悬架系统中的应用 1643次阅读
- 基于神经网络模型参考自适应实现混合动力汽车电子差速控制系统的设计 3220次阅读
- 流行的Java神经网络库,以及实现神经网络的方法 3543次阅读
- 深度学习或者人工神经网络模拟了生物神经元? 5475次阅读
- 机器学习--神经网络笔记 3978次阅读
- LSTM隐层神经元结构分析,及应用的程序详细概述 8788次阅读
- 神经元和函数算法之间的关系(干货) 1.1w次阅读
- 自适应控制的优缺点_自适应控制存在的问题及发展 4.6w次阅读
- 什么是自适应控制_自适应控制基本原理 5.4w次阅读
- 通过删除神经元来理解深度学习 3374次阅读
- 什么是神经网络?学习人工智能必会的八大神经网络盘点 2.4w次阅读
- 自适应模糊神经网络的交通灯控制系统的设计 2747次阅读
- 基于FPGA的神经网络算法的设计 5338次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1ATmega8芯片中文手册
- 2.45 MB | 3次下载 | 1 积分
- 2带有集成场效应晶体管(FET) 的3.1V至5.5V输入,3A输出同步降压稳压器TPS51312数据表
- 1.28MB | 3次下载 | 免费
- 3VGA 转 HDMI 输出的音视频采集卡LCC385数据手册
- 0.34 MB | 2次下载 | 免费
- 4全志A527系列规格书YNH-830-V1
- 2.39 MB | 2次下载 | 免费
- 5光伏太阳能电池板可编程最大功率点跟踪控制器SM72442数据表
- 373.53KB | 2次下载 | 免费
- 6传感芯片选型指南
- 3.60 MB | 2次下载 | 免费
- 7采用Eco-mode™的TPS54540B 4.5V至42V输入、5A 降压直流/直流转换器数据表
- 3.1MB | 1次下载 | 免费
- 832×4 LCD显示驱动芯片VK1C21系列数据手册
- 7.28 MB | 1次下载 | 免费
本月
- 1ES9038PRO解码芯片的电路原理图介绍
- 0.25 MB | 33次下载 | 5 积分
- 2DC-DC电路(Buck)的设计与仿真
- 0.60 MB | 24次下载 | 2 积分
- 3UHD智能显示SoC VS680产品简介
- 0.46 MB | 11次下载 | 免费
- 4STM32国内外发展现状
- 1.15 MB | 8次下载 | 免费
- 5采用 Impedance Track™ 技术的宽量程电量监测计BQ34Z100-G1数据表
- 2.7MB | 7次下载 | 免费
- 6TDK电容器产品指南
- 11.88 MB | 7次下载 | 1 积分
- 7CR6842 12V/5A 反激式开关电源方案介绍
- 0.10 MB | 6次下载 | 免费
- 816A 输出电流,高可靠、高效率 同步降压转换器PCD3201产品手册
- 0.47 MB | 6次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935085次下载 | 免费
- 2开源硬件-PMP21529.1-4 开关降压/升压双向直流/直流转换器 PCB layout 设计
- 1.48MB | 420049次下载 | 免费
- 3Altium DXP2002下载入口
- 未知 | 233067次下载 | 免费
- 4电路仿真软件multisim 10.0免费下载
- 340992 | 191315次下载 | 免费
- 5十天学会AVR单片机与C语言视频教程 下载
- 158M | 183316次下载 | 免费
- 6labview8.5下载
- 未知 | 81567次下载 | 免费
- 7Keil工具MDK-Arm免费下载
- 0.02 MB | 73786次下载 | 免费
- 8NI LabVIEW中实现3D视觉的工具和技术
- 未知 | 70088次下载 | 免费





 工商网监
工商网监
评论