 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
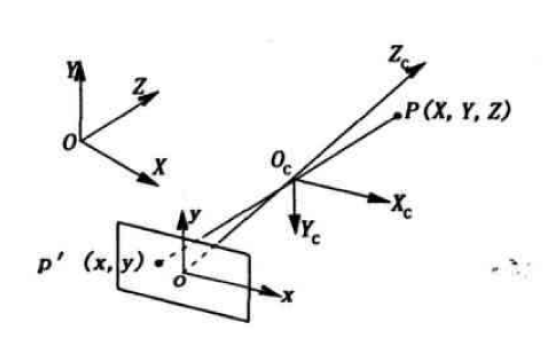
利用几何成像原理建立起CCD双目立体视觉测量系统的数学模型,从提高系统测量精度出发,在理论上重点对系统结构参数、图像识别误差与系统测量精度的关系进行了深入的分析和探讨,并通过实验对结论进行了验证。研究内容对实际建立该测量系统具有很强的指导作用。
双目立体视觉测量技术是计算机视觉中的一个重要分支,一直是计算机视觉研究的重点和热点之一。由于其近似于人眼视觉系统,具有较高的测量精度和速度,并具有结构简单,便于使用等优点,所以被广泛应用于工业检测、物体识别、工件定位、机器人自导引等诸多领域。近年来许多学者对此进行了大量的研究工作。其中大量的工作集中在对视觉测量系统的数学模型、系统的定标方法以及目标特征点匹配算法的研究上,而对系统的结构参数(两个CCD之间的距离、光轴夹角等)研究得却很少。对立体视觉结构参数进行了相应的理论研究,但它是从观看物体时的深度感出发研究CCD与物体之间的距离、两个CCD间距和观看距离3个参数之间的关系,没有涉及到结构参数对系统测量精度的影响。而实践证明系统的结构参数设置在实际应用中对于系统的测量精度是至关重要的。此外,从立体视觉测量原理中,可以看出图像识别误差是另一个对系统测量精度产生直接影响的重要因素。综合以上考虑,从理论上对系统的结构参数设置和图像识别误差对系统测量精度的影响进行了深入的分析和研究。结合系统结构参数对摄像机定标精度的影响,给出了实际应用中组建双目立体视觉测量系统的设计方案。
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 双目立体视觉原理 HALCON的双目视觉系统研究 0次下载
- 面向双目立体视觉的迭代式局部颜色校正方法 5次下载
- 双目立体计算机视觉的立体匹配研究综述 3次下载
- 如何使用FPGA实现微型实时多目立体视觉机的设计 21次下载
- 如何使用双目立体视觉实现小型工件测量系统详细资料说明 0次下载
- 使用双目立体视觉实现CCD测距系统设计的资料说明 6次下载
- 机器视觉系统的三种应用案例详细说明 23次下载
- 双目立体视觉在动车车身关键尺寸检测中的应用 4次下载
- 基于双目立体视觉的桥梁裂缝测量 0次下载
- 基于斜交视锥立体摄像机模型的虚拟现实立体视觉解决方案 1次下载
- 基于立体视觉的在线实时测量系统设计与实现 0次下载
- 双目立体视觉在光电子器件自动对接系统中的应用 63次下载
- 双目立体视觉传感器精度分析与参数设计 75次下载
- 基于HALCON的双目立体视觉系统实现 130次下载
- 几何法在双目立体视觉中的应用 14次下载
- 三维视觉测量技术:被动视觉测量和主动视觉测量 228次阅读
- 双目立体视觉是什么样的技术? 252次阅读
- CCD机器视觉及其检测系统的优势 591次阅读
- 如何通过立体视觉构建小巧轻便的深度感知系统 402次阅读
- 几种经典的双目匹配的算法 1524次阅读
- 检测三维物体?一篇文章认识《双目立体视觉》 483次阅读
- FPGA的入门基础知识详细说明 8660次阅读
- 在DM642开发评估板上实现双目视觉监控系统的软硬件设计方案 966次阅读
- 什么是“Blockdrop”?立体视觉应用的神经形态技术 4664次阅读
- 双目立体视觉摄像头模块开发设计 2852次阅读
- 双目立体视觉三维测量原理 2.3w次阅读
- 双目视觉技术的原理、结构、特点、发展现状和发展方向分析 4.9w次阅读
- 3D双目立体视觉在机器人视觉的应用 1.5w次阅读
- 双目视觉三维定位原理解析 2.2w次阅读
- 图像处理基本算法-立体视觉 5174次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1电子电路原理第七版PDF电子教材免费下载
- 0.00 MB | 1490次下载 | 免费
- 2单片机典型实例介绍
- 18.19 MB | 92次下载 | 1 积分
- 3S7-200PLC编程实例详细资料
- 1.17 MB | 27次下载 | 1 积分
- 4笔记本电脑主板的元件识别和讲解说明
- 4.28 MB | 18次下载 | 4 积分
- 5开关电源原理及各功能电路详解
- 0.38 MB | 10次下载 | 免费
- 6基于AT89C2051/4051单片机编程器的实验
- 0.11 MB | 4次下载 | 免费
- 7蓝牙设备在嵌入式领域的广泛应用
- 0.63 MB | 3次下载 | 免费
- 89天练会电子电路识图
- 5.91 MB | 3次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 2PADS 9.0 2009最新版 -下载
- 0.00 MB | 66304次下载 | 免费
- 3protel99下载protel99软件下载(中文版)
- 0.00 MB | 51209次下载 | 免费
- 4LabView 8.0 专业版下载 (3CD完整版)
- 0.00 MB | 51043次下载 | 免费
- 5555集成电路应用800例(新编版)
- 0.00 MB | 33562次下载 | 免费
- 6接口电路图大全
- 未知 | 30320次下载 | 免费
- 7Multisim 10下载Multisim 10 中文版
- 0.00 MB | 28588次下载 | 免费
- 8开关电源设计实例指南
- 未知 | 21539次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935053次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537791次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420026次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233045次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191183次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183277次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138039次下载 | 免费





 工商网监
工商网监
评论