 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
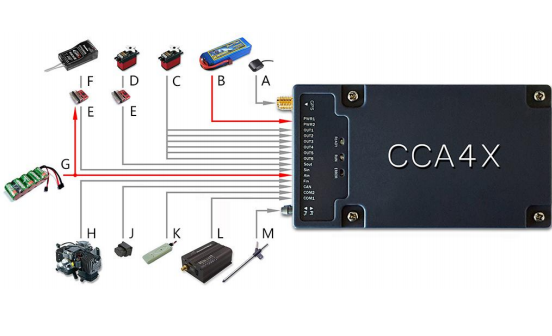
CCA42 多功能图形化组态编程飞行控制系统,集成了无人机飞行及任务控制、飞行数据高速采集、控制系统组态建模设计和半物理仿真等四大功能,非常适合专业用户根据个性化需求进行工程开发和应用扩展。
用户根据控制对象的特性、控制要求和控制目的,使用控制律组态建模软件按需选择功能模块,用鼠标将需要相互关联的功能模块用连线连接,就构成了结构和流程直观清晰的系统应用程序。用户能够快速方便地从理论设计直接进入到实现开发阶段,高效率地完成控制系统的组态建模、系统辨识、动态仿真以及实时系统运行。
飞行控制律设计软件拥有丰富的通用和专用功能模块资源、灵活强大的组态编辑功能、算法逻辑校验、在线调试运行和嵌入式半物理仿真系统,兼容多种通信协议、支持多种硬件设备。用户不需要书写任何程序代码,就能够完成飞行器所需的各种复杂功能的工程控制算法设计、调试和仿真。
三轴角速率陀螺、三轴加速度计、三轴磁力计
双嘴空速传感器、气压高度计
10Hz GPS, GLONASS, BeiDou, Galileo 四系统卫星接收机
DSP 数字信号处理器 、CPLD、24 位 A/D 转换器
18 通道 PPM 控制信号输入
18 通道舵机输出
2 通道电压监测
2 通道转速监测
8G 外置 USB 高速飞行数据记录器
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 无人机降落伞安全控制系统的详细资料说明 4次下载
- 多旋翼无人机飞行器的入门学习资料和实践说明 12次下载
- MATLAB教程之控制系统数字仿真的实现详细资料说明 10次下载
- Matlab与系统控制simulink仿真的PPT课件合集免费下载 22次下载
- CCA4X多功能图形化组态编程飞行控制系统的介绍和使用手册免费下载 19次下载
- 无人机中继模块和无人机图传控制系统介绍 60次下载
- 无人机PID控制律设计方案pdf下载 10次下载
- 基于STM32微控制器的小型无人机飞行控制系统 37次下载
- 基于SOPC的微型无人机飞行控制系统设计_宋宇 1次下载
- 改进PID的无人机飞行姿态角控制消颤算法_陆兴华 3次下载
- 基于RTX的无人机飞行剖面实时仿真 37次下载
- 无人机飞行控制系统地面仿真平台设计与实现 136次下载
- STA3X无人机飞行控制系统 273次下载
- 基于uCOS的无人机仿真系统设计与实现 45次下载
- 基于ARM的无人机飞行控制系统的实现 194次下载
- 四旋翼无人机的飞行原理及控制方法 1260次阅读
- 基于DSP的无人飞行器飞行控制系统设计 683次阅读
- 无人机链路系统的组成 3200次阅读
- Naza-M多旋翼无人机飞控系统的详细资料简介 1.1w次阅读
- 无人机飞行控制系统的主要部件组成和主要功能详细说明 4.5w次阅读
- 无人机飞行感知技术有什么用途 1844次阅读
- 无人机四大系统的作用和发展趋势 1.3w次阅读
- 关于无人机飞行控制系统的全面解析 1.3w次阅读
- 浅析基于FPGA的无人机控制器设计方案解析 6402次阅读
- 无人机飞控系统半实物仿真平台设计方案解析 1w次阅读
- 怎样使无人机安全飞行?无人机飞行需要掌握什么安全知识 1.5w次阅读
- 水下无人机原理分析 1.3w次阅读
- 大疆无人机的三种飞行模式详解 28.7w次阅读
- 中国无人机技术型号种类介绍 3.3w次阅读
- 无人机飞控系统组成及系统软件设计 1.5w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1电子电路原理第七版PDF电子教材免费下载
- 0.00 MB | 1490次下载 | 免费
- 2单片机典型实例介绍
- 18.19 MB | 93次下载 | 1 积分
- 3S7-200PLC编程实例详细资料
- 1.17 MB | 27次下载 | 1 积分
- 4笔记本电脑主板的元件识别和讲解说明
- 4.28 MB | 18次下载 | 4 积分
- 5开关电源原理及各功能电路详解
- 0.38 MB | 10次下载 | 免费
- 6基于AT89C2051/4051单片机编程器的实验
- 0.11 MB | 4次下载 | 免费
- 7基于单片机和 SG3525的程控开关电源设计
- 0.23 MB | 3次下载 | 免费
- 8基于单片机的红外风扇遥控
- 0.23 MB | 3次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 2PADS 9.0 2009最新版 -下载
- 0.00 MB | 66304次下载 | 免费
- 3protel99下载protel99软件下载(中文版)
- 0.00 MB | 51209次下载 | 免费
- 4LabView 8.0 专业版下载 (3CD完整版)
- 0.00 MB | 51043次下载 | 免费
- 5555集成电路应用800例(新编版)
- 0.00 MB | 33562次下载 | 免费
- 6接口电路图大全
- 未知 | 30320次下载 | 免费
- 7Multisim 10下载Multisim 10 中文版
- 0.00 MB | 28588次下载 | 免费
- 8开关电源设计实例指南
- 未知 | 21539次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935053次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537791次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420026次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191183次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183277次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138039次下载 | 免费





 工商网监
工商网监
评论