 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
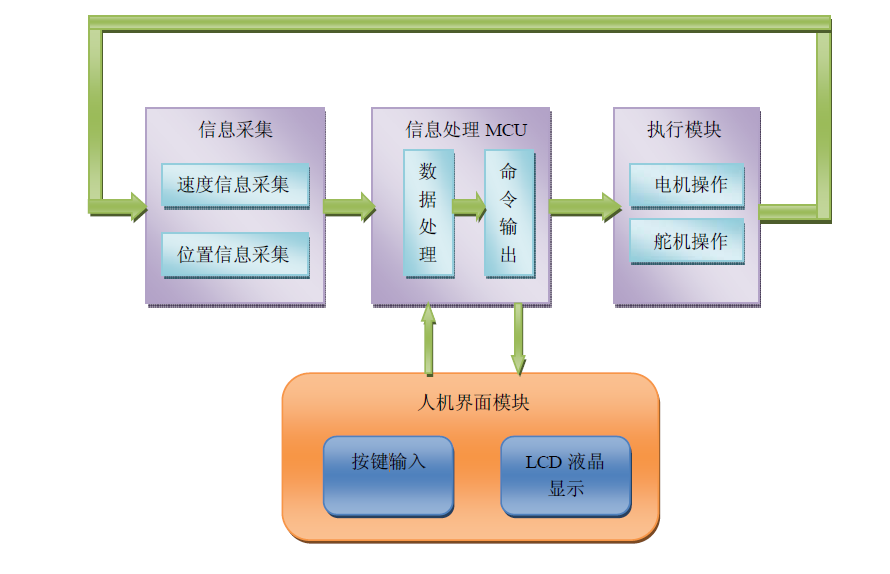
智能小车以飞思卡尔16位微控制 MC9S12DG128B为控制器,采用多传感器进行信息采集,运用反射式红外传感器设计路径检测模块和速度监测模块。同时,采用PWM技术,控制舵机的转向和电机转速。系统还扩展了LCD(Liquid Crystal Display:液晶显示屏)和键盘模块作为人机操作界面,以便于智能小车的相关参数调整。此外,PID寻迹算法结合ABS(Anti-skid Brake System.:防抱死系统)技术,使我们的小车能在曲折的赛道上畅通无阻。
技术报告以智能小车的设计为主线,包括小车的构架设计、软硬件设计,以及控制算法研究等,分为六章。其中,第一章为引言部分,第二章主要介绍了小车的总体设计,第三章对小车的硬件设计进行了详细的介绍,其中包括机械改造,电路设计两大部分,第四章描述了小车的软件设计和相关算法,第五章对使用到的单片机资源作了说明,第六章叙述了我们在设计过程中遇到的问题和解决方法。附录A的研究论文介绍了小车智能行驶的控制算法,附录 B 为程序源代码清单,红外传感器参数说明见附录C,附录D为小车配件清单。
在本次竞赛中,要求所设计的小车具有自动寻迹的功能,能在指定跑道上高速,稳定地运行。跑道为黑白两色。其背景色为白色,跑道中央有一条黑线作为小车行进的依据。很明显,我们要设计的小车是要能沿黑线的正常行驶,并在此基础上,尽量提高小车行驶速度。
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 基于51单片机的自动寻迹小车控制的设计 50次下载
- 四轮智能小车避障设计的程序和工程文件免费下载 6次下载
- 使用51单片机实现寻迹小车的程序 3次下载
- 智能寻迹小车的原理图和PCB图免费下载 122次下载
- 使用单片机进行智能寻迹小车的设计资料合集免费下载 7次下载
- 使用51单片机设计两路探头巡黑线的寻迹智能小车源程序免费下载 24次下载
- 使用51单片机进行智能小车五路寻迹程序与PWM驱动的程序免费下载 8次下载
- 智能循迹小车的C语言程序免费下载 21次下载
- 寻迹智能小车电路图免费下载 43次下载
- 智能小车的设计程序和测试程序免费下载 20次下载
- 使用单片机进行自主寻迹电动小车的设计论文程序和电路图合集免费下载 11次下载
- 寻迹小车程序详细资料免费下载 42次下载
- 循迹避障小车(寻迹程序+避障程序) 449次下载
- 智能寻迹避障小车设计 38次下载
- 单片机的智能寻迹避障小车设计 26次下载
- PLC程序设计常用方法总结 1485次阅读
- 浅谈项目中的程序设计思路与步骤 522次阅读
- 解析PLC梯形图程序设计 947次阅读
- 如何利用逻辑设计法进行PLC的程序设计 3399次阅读
- STM32单片机实现直流减速电机控制的程序设计 9605次阅读
- 52单片机对智能小车的控制设计 4586次阅读
- 基于单片机控制的自主寻迹电动小车的设计 3381次阅读
- 介绍MATLAB程序设计中M程序及使用方法 6498次阅读
- 一文解析运动控制器的程序设计 6992次阅读
- vb语言程序简单设计实例(5款vb语言设计程序分享) 10.7w次阅读
- 算法与程序的区别关系_算法与程序设计知识点总结 5.8w次阅读
- 基于FPGA的视觉导航小车设计与实现 3891次阅读
- fpga设计与应用:智能小车设计方案 4130次阅读
- KC智能寻迹小车 2652次阅读
- 基于MSP430的智能小车寻迹模块设计方案 1.2w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 2开关电源基础知识
- 5.73 MB | 11次下载 | 免费
- 3100W短波放大电路图
- 0.05 MB | 4次下载 | 3 积分
- 4嵌入式linux-聊天程序设计
- 0.60 MB | 3次下载 | 免费
- 5DIY动手组装LED电子显示屏
- 0.98 MB | 3次下载 | 免费
- 6基于FPGA的C8051F单片机开发板设计
- 0.70 MB | 2次下载 | 免费
- 751单片机PM2.5检测系统程序
- 0.83 MB | 2次下载 | 免费
- 8基于51单片机的RGB调色灯程序仿真
- 0.86 MB | 2次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537797次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191186次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论