 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
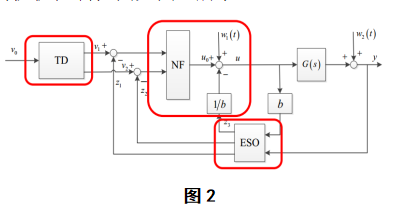
自抗扰控制器从设计思想源头至今已经有20多年的发展历史。如今自抗扰控制器在控制界已具有一定知名度,不少人被其独特的控制思想以及卓越得控制品质所吸引。本文基于传统PID原理对PID优缺点进行分析,利用非线性机制开发一些具有特殊功能得环节:跟踪微分器CTD,扩张状态 观测器ESO,非线性PID等,最后以此组合出高质量得新型控制器—自抗扰控制器(ADRC),从而形成新的“自抗扰技术”。新型的控制器具有算法简单,参数易调的优点。
PID控制器在工业过程控制中占据的主导地位是绝无仅有的。PID控制器在运动、航天、等 其他控制领域占有着非常重要的地位。尽管现代控制理论给出了非常完美的控制理论,但是仍然难以在现代的工业控制中立足。面对这种局面,本文从 传统PID控制技术出发,探索PID的机理,发扬PID的优势,进而寻找更好的控制方法。
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 如何使用单片机实现霓虹灯控制器的详细资料说明 1次下载
- Python的100个小例子详细资料说明 14次下载
- S-Drive mkII型踏板车控制器的详细资料说明 4次下载
- DSP与FPGA控制通信的详细资料说明 43次下载
- 使用单片机实现流水灯的详细资料说明 7次下载
- 存储器及接口设计的详细资料说明 17次下载
- emmc启动烧写的详细资料说明 26次下载
- 使用FPGA实现LED实验的详细资料说明 9次下载
- Protel DXP的常用快捷键详细资料说明 0次下载
- MATLAB教程之控制系统数字仿真的实现详细资料说明 10次下载
- 程序的转移类指令详细资料说明 0次下载
- 如何使用C语言实现软复位详细资料说明 1次下载
- LabVIEW教程之结构与属性控制的详细资料说明 13次下载
- TI聚焦控制器的详细资料说明 1次下载
- 基于8位PIC单片机实现多相交错式PWM控制器的详细资料概述 15次下载
- 固态锂离子电池的详细资料解析 8342次阅读
- RS232接口串口取电电路的详细资料介绍 6047次阅读
- 使用单片机实现智能卡接口控制器的设计资料说明 2156次阅读
- 如何进行PLC控制程序的设计详细资料PPT说明 5285次阅读
- 库卡机器人模拟量输入输出编程的详细资料概述 6123次阅读
- PPT教程之伺服电机及其驱动技术的详细资料讲解 6124次阅读
- PLC工作原理动画详细资料分析包括顺序控制和正反转控制等十八张动图 11w次阅读
- 开关电源的正激变换器基本工作原理及元器件如何选择等详细资料概述 1.1w次阅读
- PLC常用基本环节梯形图和详细文字说明详细资料概述 7773次阅读
- 变压器保护的基本要求,保护配置和运行规定的详细资料概述 7147次阅读
- pid控制器的输入输出_PID控制器的控制实现 2.5w次阅读
- 门禁控制器怎么接线_门禁控制器接线图说明 10.3w次阅读
- Crossbar的多通道DMA控制器设计 4587次阅读
- DMX512控制器说明及介绍,DMX512控制器使用说明 8.3w次阅读
- 跳频控制器的工作原理 1446次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 2开关电源基础知识
- 5.73 MB | 11次下载 | 免费
- 3100W短波放大电路图
- 0.05 MB | 4次下载 | 3 积分
- 4嵌入式linux-聊天程序设计
- 0.60 MB | 3次下载 | 免费
- 5DIY动手组装LED电子显示屏
- 0.98 MB | 3次下载 | 免费
- 6基于FPGA的C8051F单片机开发板设计
- 0.70 MB | 2次下载 | 免费
- 751单片机PM2.5检测系统程序
- 0.83 MB | 2次下载 | 免费
- 8基于51单片机的RGB调色灯程序仿真
- 0.86 MB | 2次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537797次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191186次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论