 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
电子罗盘作为无人机产品的重要组成部件,承载着为无人机引导绝对方位的功能。对于普通设计者而言,经常会遇到电子罗盘校正困难,校正需求过于频繁,动态、高速运行时突发偏离,以及无论怎么校正电子罗盘都无法正常运行的情况。以上故障的发生,主要原因是电子罗盘受到了磁场干扰,而针对于这一问题,全球领先的磁传感器公司爱盛科技给出了简单而高效的解决方案。
目前,爱盛科技旗下3×3mm LGA封装的地磁传感器IST8310,在无人机市场的市占率超过80%,市场上能够看到的大厂的无人机产品,都采用了爱盛科技的地磁传感器,是现今主流无人机使用地磁传感器的标杆产品,因此下文提及的无人机测试样本,也均为这一型号。众所周知,磁场和距离的多次方成反比,而无人机内部电子罗盘和其余电子元器件距离较近,因此内部系统排布的不合理会导致电子罗盘受到磁场干扰,而这一情况又往往被设计者忽略。为了避免在实际飞行时因电子罗盘故障而出现坠机情况,在无人机完成硬件打样或试作后,无需进行实际飞行,通过测试即可完成对电子罗盘的准确分析。在前期测试中,先用木材、塑料、泡棉、铝材没有磁场的材料将无人机固定,值得注意的是,无人机最好安装外壳和旋翼,这能够最大程度去模拟真实飞行时的情况。考虑到无人机马达和电路可能为磁场干扰源,因此我们需要从I2C接口导出“X轴磁场大小、Y轴磁场大小、Z轴磁场大小、油门大小”这几项数据加以储存并相互对比,作为后续分析的重要依据。
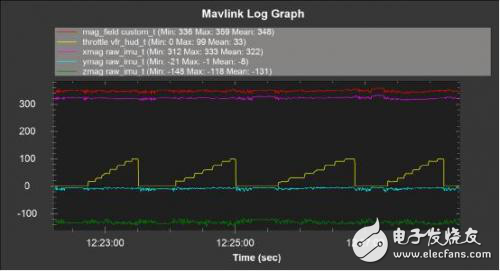
图1:无人机内部系统设计合理 油门开启时磁场感应规律且稳定
测试过程中,只需将油门从关闭调整到开启状态并逐级推进,进行几轮反复测试,最终将几轮测试的数据汇总到同一时间轴上进行展现。由于无人机已经被固定住,并没有出现方位的移动,因此理论上无论油门如何调整,X、Y、Z各轴磁场的数字应变化不大,呈现出区域平稳的态势。但实际上,由于电子罗盘组件本身及系统都会有噪声,因此数据线条会有一定程度的上下抖动,但趋势应是不变的,抖动的幅度越小,意味着移动路线越稳定。同理,在油门开启或关闭时,实际也会产生一个突波影响电路,磁场同样会产生波动,数据线条抖动越小,也代表电子罗盘放置的位置比较好,系统的整体设计比较合理。如图1所示,一个内部系统设计正确的无人机,在测试中经历了四次油门变化,从零加速到100%,但是指向角度、X轴、Y轴、Z轴磁场都没有强烈波动,只有在油门开启或关闭时,数据会有些许的波动。说明在运作时电子罗盘不会受到系统内的磁场干扰影响,无人机将有较好的操控性能。
目前,爱盛科技旗下3×3mm LGA封装的地磁传感器IST8310,在无人机市场的市占率超过80%,市场上能够看到的大厂的无人机产品,都采用了爱盛科技的地磁传感器,是现今主流无人机使用地磁传感器的标杆产品,因此下文提及的无人机测试样本,也均为这一型号。众所周知,磁场和距离的多次方成反比,而无人机内部电子罗盘和其余电子元器件距离较近,因此内部系统排布的不合理会导致电子罗盘受到磁场干扰,而这一情况又往往被设计者忽略。为了避免在实际飞行时因电子罗盘故障而出现坠机情况,在无人机完成硬件打样或试作后,无需进行实际飞行,通过测试即可完成对电子罗盘的准确分析。在前期测试中,先用木材、塑料、泡棉、铝材没有磁场的材料将无人机固定,值得注意的是,无人机最好安装外壳和旋翼,这能够最大程度去模拟真实飞行时的情况。考虑到无人机马达和电路可能为磁场干扰源,因此我们需要从I2C接口导出“X轴磁场大小、Y轴磁场大小、Z轴磁场大小、油门大小”这几项数据加以储存并相互对比,作为后续分析的重要依据。
图1:无人机内部系统设计合理 油门开启时磁场感应规律且稳定
测试过程中,只需将油门从关闭调整到开启状态并逐级推进,进行几轮反复测试,最终将几轮测试的数据汇总到同一时间轴上进行展现。由于无人机已经被固定住,并没有出现方位的移动,因此理论上无论油门如何调整,X、Y、Z各轴磁场的数字应变化不大,呈现出区域平稳的态势。但实际上,由于电子罗盘组件本身及系统都会有噪声,因此数据线条会有一定程度的上下抖动,但趋势应是不变的,抖动的幅度越小,意味着移动路线越稳定。同理,在油门开启或关闭时,实际也会产生一个突波影响电路,磁场同样会产生波动,数据线条抖动越小,也代表电子罗盘放置的位置比较好,系统的整体设计比较合理。如图1所示,一个内部系统设计正确的无人机,在测试中经历了四次油门变化,从零加速到100%,但是指向角度、X轴、Y轴、Z轴磁场都没有强烈波动,只有在油门开启或关闭时,数据会有些许的波动。说明在运作时电子罗盘不会受到系统内的磁场干扰影响,无人机将有较好的操控性能。
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 谷景电感助力无人机行业升级换代
- DragonFly无人机原理图免费下载 23次下载
- 笔记:四旋翼无人机从0到1的实现,目录链接 36次下载
- 基于无人机图像的两阶段销钉缺陷检测模型 39次下载
- 新型轨迹规划可提高无人机的高吞吐量 23次下载
- 小型电动无人机的总体参数设计方法研究说明 19次下载
- 无人机的飞行原理的简介和设计资料说明 15次下载
- 无人机和无人机控制方法及无人机远程操控系统方法说明 67次下载
- 如何使用无线电对无人机进行管控 7次下载
- 无人机中继模块和无人机图传控制系统介绍 60次下载
- 无人机柔性装配工装应用 2次下载
- 正确判断无人机指向故障 让电子罗盘远离磁干扰 2次下载
- 基于无人机的分类 20次下载
- 基于STM32的无人机姿态测量系统设计 44次下载
- 无人机侦测和反制系统 30次下载
- 什么是无人机图传系统?无人机图传系统的构成 2023次阅读
- 关于如何制作一个无人机 3.7w次阅读
- 无人机是如何充电的? 2w次阅读
- 无人机容易被干扰的原理 5309次阅读
- 怎样使无人机安全飞行?无人机飞行需要掌握什么安全知识 1.5w次阅读
- 新疆为什么禁飞无人机_新疆无人机禁飞区域 5.6w次阅读
- 水下无人机原理分析 1.3w次阅读
- nixie微型无人机的功能介绍_nixie微型无人机多少钱 1.3w次阅读
- 大疆做不做军用无人机 2w次阅读
- 大疆无人机禁飞区查询_大疆无人机禁飞区域 12.9w次阅读
- 怎么干扰无人机_无人机干扰器原理 3.7w次阅读
- 电动无人机和油动无人机性能的对比 2619次阅读
- 如何正确判断无人机指向故障?让电子罗盘远离磁干扰 7708次阅读
- 炸机:无人机的终极梦魇 2.9w次阅读
- 浅析无人机在安防领域的应用 1695次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1ATmega8芯片中文手册
- 2.45 MB | 3次下载 | 1 积分
- 2VGA 转 HDMI 输出的音视频采集卡LCC385数据手册
- 0.34 MB | 2次下载 | 免费
- 3全志A527系列规格书YNH-830-V1
- 2.39 MB | 2次下载 | 免费
- 4带有集成场效应晶体管(FET) 的3.1V至5.5V输入,3A输出同步降压稳压器TPS51312数据表
- 1.28MB | 2次下载 | 免费
- 5光伏太阳能电池板可编程最大功率点跟踪控制器SM72442数据表
- 373.53KB | 2次下载 | 免费
- 6传感芯片选型指南
- 3.60 MB | 2次下载 | 免费
- 7快速动态响应低噪声 3A LDO稳压器PCD3942 数据手册
- 0.85 MB | 1次下载 | 免费
- 8照明-电源-POE-GEVB评估套件数据手册
- 4.40 MB | 1次下载 | 免费
本月
- 1DC-DC电路(Buck)的设计与仿真
- 0.60 MB | 23次下载 | 2 积分
- 2UHD智能显示SoC VS680产品简介
- 0.46 MB | 11次下载 | 免费
- 3ES9038PRO解码芯片的电路原理图介绍
- 0.25 MB | 11次下载 | 5 积分
- 4采用 Impedance Track™ 技术的宽量程电量监测计BQ34Z100-G1数据表
- 2.7MB | 7次下载 | 免费
- 5东芝BiCD集成电路硅单片TB67S109AFNAG数据手册
- 1.93 MB | 6次下载 | 免费
- 6CR6842 12V/5A 反激式开关电源方案介绍
- 0.10 MB | 6次下载 | 免费
- 7电池管理系统(BMS)软硬件介绍
- 0.23 MB | 6次下载 | 2 积分
- 8TDK电容器产品指南
- 11.88 MB | 6次下载 | 1 积分
总榜
- 1matlab软件下载入口
- 未知 | 935085次下载 | 免费
- 2开源硬件-PMP21529.1-4 开关降压/升压双向直流/直流转换器 PCB layout 设计
- 1.48MB | 420049次下载 | 免费
- 3Altium DXP2002下载入口
- 未知 | 233067次下载 | 免费
- 4电路仿真软件multisim 10.0免费下载
- 340992 | 191315次下载 | 免费
- 5十天学会AVR单片机与C语言视频教程 下载
- 158M | 183316次下载 | 免费
- 6labview8.5下载
- 未知 | 81567次下载 | 免费
- 7Keil工具MDK-Arm免费下载
- 0.02 MB | 73786次下载 | 免费
- 8NI LabVIEW中实现3D视觉的工具和技术
- 未知 | 70088次下载 | 免费





 工商网监
工商网监
评论