 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
2:激光雷达的分类
根据扫描机构的不同,激光测距雷达有2D和3D两种。它们大部分都是靠一个旋转的反射镜将激光发射出去并通过测量发射光和从物体表面反射光之间的时间差来测距。3D激光测距雷达的反射镜还附加一定范围内俯仰以达到面扫描的效果。它们都是直接测距方法。同3D激光测距雷达相比,2D激光测距雷达只在一个平面上扫描,结构简单,测距速度快、系统稳定可靠。目前2D激光测距雷达主要在室内的移动机器人上应用较多,因为在室内的结构化环境下,地面平坦,所有障碍物又都垂直于地面,因此机器人只要能在平行于地面的平面上获取环境信息便己经足够导航的需要。很多室内移动机器人的应用,如环境的地图生成,机器人的自定位,避障等等的研究都是基于2D激光测距雷达的。但是,将2D激光测距雷达用于越野环境下的障碍物检测有相当的难度。由于越野地形复杂,高低不平,由此会引起车体行驶时的剧烈颠簸。而2D激光测距雷达只能是单线扫描,因此不可避免的会引起比较严重的障碍物的漏检和虚报现象。
3:激光雷达测量时间的技术
激光测距雷达测量时间差有三种不同的技术:
(l)脉冲检测法:直接测量反射脉冲与发射脉冲之间的时间差;
(2)相干检测法:通过测量调频连续波的发射光束和反射光束之间的差频而测量时间差;
(3)相移检测法:通过测量调幅连续波,的发射光束和反射光束之间的相位差而测量时间差。由于相位差的2兀周期性,因此这一方法测得的只是相对距离,而非绝对距离,
4:激光雷达在ALV中的用途
在陆地移动机器人的导航中,3D激光测距雷达应用得比较多。在移动机器人中中主要应用在以下三个方面:
(1)路标检测及地图匹配
(2)越野行驶时建立地形图
(3)障碍物检测
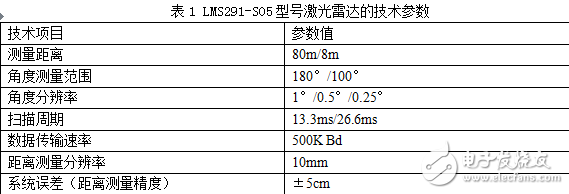
5:举例LMS291-s05型号的激光雷达的特点和参数
以LMS291-S05型号激光雷达为例进行分析,该型号是一种二维的激光雷达,只扫描一个平面的数据,其特点是:(1) 感知距离远,最大可达80米;覆盖角度范围大,最大可达180度;(2) 距离和角度测量精度高,分别可达5厘米和0.1度;(3) 扫描时间短,约为26.6毫秒,可以获得高车速情况下的实时测量;(4) 具有雾校正功能,对环境光线变化不敏感,适用于室外环境。LMS291-S05型号激光雷达详细的技术参数请见表1。其中比较重要的参数包括角度测量范围和角度分辨率、扫描周期、系统误差。角度测量范围和角度分辨率决定了激光雷达得到的数据量;扫描周期是对定位算法实时性的评价标准;系统误差对整个定位过程的精度有很大影响。
- 带有运动跟踪和激光雷达的机器人汽车路径规划 0次下载
- 【虹科】HKCubeRange1激光雷达产品规格_中文简体
- 【虹科】HKCube1激光雷达产品规格_中文简体
- 【虹科】HKCube激光雷达介绍_中文简体
- 激光雷达技术及其发展动向.pdf 145次下载
- 【虹科】MEMS激光雷达技术与应用
- 基于单线激光雷达的数字重构系统综述 75次下载
- 基于拉曼激光雷达的大气水汽监测系统 27次下载
- PLC技术在移动机器人中的应用研究 19次下载
- 小米2D激光雷达拆解资源下载 0次下载
- 激光雷达原理的PDF电子书免费下载 259次下载
- 小米的2D激光雷达拆解图和讲解 116次下载
- 军用激光雷达相关技术的介绍及其发展趋势解析 24次下载
- 激光雷达的优劣势与无人驾驶汽车和家用机器人上的激光雷达的区别介绍 56次下载
- 激光雷达的含义及其优点和分类的介绍 43次下载
- 激光雷达LIDAR基本工作原理 184次阅读
- 阐述基于激光三角测距法的激光雷达原理 700次阅读
- 什么是激光雷达?激光雷达的构成与分类 940次阅读
- 晶振在激光雷达系统中的作用 290次阅读
- TOF激光雷达的类别 990次阅读
- 浅谈激光雷达的盲区 2789次阅读
- 基于STM32开发板和思岚A1M8激光雷达制作地图扫描仪 9826次阅读
- 激光雷达传感技术的定义与分类 2262次阅读
- 激光雷达的7大分类 7539次阅读
- 什么才是衡量激光雷达实用和可靠的指标 2947次阅读
- 介绍激光雷达和相机在无人车感知中的应用 6784次阅读
- 教你如何深入了解激光雷达! 1.7w次阅读
- 简单介绍自动驾驶中的车载激光雷达 1.3w次阅读
- Cortex-A53嵌入式处理器平台上实现激光雷达SLAM的方法 8952次阅读
- 激光雷达除了无人车领域,还能怎么用? 1371次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 2开关电源基础知识
- 5.73 MB | 11次下载 | 免费
- 3100W短波放大电路图
- 0.05 MB | 4次下载 | 3 积分
- 4嵌入式linux-聊天程序设计
- 0.60 MB | 3次下载 | 免费
- 5DIY动手组装LED电子显示屏
- 0.98 MB | 3次下载 | 免费
- 6基于FPGA的C8051F单片机开发板设计
- 0.70 MB | 2次下载 | 免费
- 751单片机PM2.5检测系统程序
- 0.83 MB | 2次下载 | 免费
- 8基于51单片机的RGB调色灯程序仿真
- 0.86 MB | 2次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537797次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191186次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论