 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
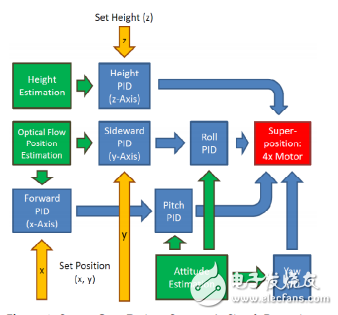
Abstract A procedure to control all six DOF (degrees of freedom) of a UAV (unmanned aerial vehicle) without an external reference system and to enable fully autonomous flight is presented here. For 2D positioning the principle of optical flow is used. Together with the output of height estimation, fusing ultrasonic, infrared and inertial and pressure sensor data, the 3D position of the UAV can be computed, controlled and steered. All data processing is done on the UAV. An external computer with a pathway planning interface is for commanding purposes only. The presented system is part of the AQopterI8 project, which aims to develop an autonomous flying quadrocopter for indoor application. The focus of this paper is 2D positioning using an optical flow sensor. As a result of the performed evaluation, it can be concluded that for position hold, the standard deviation of the position error is 10cm and after landing the position error is about 30cm. Keywords Autonomous UAV, Quadrocopter, Quadrotor, Optical Flow, Positioning, Navigation
- 航智高精度电流传感器电压传感器选型手册最新版
- 磁通门高精度电流传感器介绍及应用
- 纳特通信&是德 英文版产品合集
- BLE52832模块数据手册英文版 0次下载
- BLE52832模块数据手册英文版 0次下载
- STM32F103x8/xB数据手册英文版 0次下载
- 倒F天线IEEE论文英文版.pdf 0次下载
- 精度达1%的杂散场抗扰性磁位移传感器 论文(英文版) 0次下载
- 无线充电应用(英文版) 0次下载
- ACS780电流传感器英文数据手册 17次下载
- 高绝缘集成电流传感器芯片HMSR数据手册 13次下载
- Learning MATLAB英文版电子资料下载 0次下载
- STM8 CPU编程手册英文版下载 0次下载
- 光流传感器英文资料 6次下载
- 光电电流传感器的低功耗设计 19次下载
- 电流传感器的磁调制工作原理详解 9950次阅读
- 水流传感器作用_水流传感器的选择 8734次阅读
- 电流传感器的制作过程解析 3984次阅读
- 电流传感器的使用方法 7357次阅读
- 电流传感器的测量方法 7622次阅读
- 常见的电流传感器分类 1w次阅读
- 电流传感器与电流互感器 5436次阅读
- 电流传感器的接线方式 2.2w次阅读
- 怎样检测电流传感器是否为良品? 2407次阅读
- 霍尔电流传感器如何测量电流 5.4w次阅读
- 霍尔电流传感器选型方法_霍尔电流传感器工作原理 1.6w次阅读
- 水流传感器工作原理_水流传感器的作用_水流传感器的常见故障 10.8w次阅读
- 如何判断霍尔水流传感器的好坏 4.9w次阅读
- 一文读懂电流传感器分类 1912次阅读
- 电流传感器分类 4880次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 2开关电源基础知识
- 5.73 MB | 11次下载 | 免费
- 3100W短波放大电路图
- 0.05 MB | 4次下载 | 3 积分
- 4嵌入式linux-聊天程序设计
- 0.60 MB | 3次下载 | 免费
- 5DIY动手组装LED电子显示屏
- 0.98 MB | 3次下载 | 免费
- 6基于FPGA的C8051F单片机开发板设计
- 0.70 MB | 2次下载 | 免费
- 751单片机PM2.5检测系统程序
- 0.83 MB | 2次下载 | 免费
- 8基于51单片机的RGB调色灯程序仿真
- 0.86 MB | 2次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537797次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191186次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论