 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
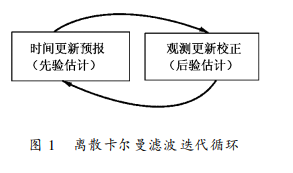
卡尔曼于 1960 年提出了离散系统线性滤波的递推求解方法即卡尔曼滤波算法。 该滤波算法是基于线性最小平方法的、进行有效递推计算的一组数学方程式, 算法功能强大, 支持对过去、现在和将来状态的估算。 本文旨在对离散系统的卡尔曼滤波作应用方面的介绍:包括对基本离散卡尔曼滤波器的描述与讨论;对扩展型卡尔曼滤波的讨论;应用实例进行分析和仿真;讨论卡尔曼滤波在汽车定位与导航工程上的应用。
1960 年 , 卡尔曼发表了关于描述离散系统线性滤波问题的递推算法的著名论文。自那时起,由于数字计算技术的巨大进步, 卡尔曼滤波方法得到了深入的研究和广泛的工程应用 ,特别是在自主或辅助定位导航领域 ,在测量和信号处理及自动控制领域 。国内较早详细介绍卡尔曼滤波理论的书籍是敬喜1973 年的《卡尔曼滤波器及其应用基础》 。此外, Gelb , Grewa , Lew is, Jacobs 等也分别对卡尔曼滤波作出了进一步深入的研究,至今,各类改进型卡尔曼滤波方法,如 :内模自适应卡尔曼滤波、带随机遗忘因子的自适应卡尔曼滤波、与各类传感器信息融合相结合的卡尔曼滤波方法都是控制理论的研究热点 。
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 卡尔曼滤波器及其应用基础.敬喜编 0次下载
- 多旋翼飞行器设计与控制的卡尔曼滤波器 0次下载
- 使用FPGA实现自适应卡尔曼滤波器的设计论文说明 22次下载
- 使用FPGA实现自适应卡尔曼滤波器的设计论文说明 13次下载
- 卡尔曼滤波器及其应用基础PDF电子书免费下载 37次下载
- 单片机有哪些常用滤波算法详细资料说明 4次下载
- 卡尔曼滤波在单片机上的使用资料和程序详细说明 40次下载
- 有源滤波器的仿真详细资料免费下载 59次下载
- RC有源滤波器EWB电路仿真的详细资料免费下载 14次下载
- 856139 1575.42MHz声表面波滤波器原理数据和应用的详细资料免费下载 9次下载
- 880365 1380MHz BAW滤波器的详细资料免费下载 3次下载
- 856794 751.5MHz声表面滤波器的详细资料免费下载 1次下载
- 880374 1090MHz IFF BAW滤波器详细资料免费下载 1次下载
- 856815 1650.75MHz声表面(SAW)滤波器的详细资料免费下载 11次下载
- 880368 1280MHz BAW滤波器的详细资料免费下载 2次下载
- 卡尔曼滤波家族 436次阅读
- 卡尔曼滤波器原理分析 597次阅读
- 扩展卡尔曼滤波的原理 4596次阅读
- 卡尔曼滤波器的基本原理 5301次阅读
- 详解卡尔曼滤波器的工作原理 3137次阅读
- 如何进行PLC控制程序的设计详细资料PPT说明 5285次阅读
- 电磁干扰滤波器的详细资料概述 1.3w次阅读
- PPT教程之伺服电机及其驱动技术的详细资料讲解 6124次阅读
- 基于matlab的各类滤波器设计 2w次阅读
- 卡尔曼滤波器:通过位置数据得出速度值 1w次阅读
- 什么是卡尔曼滤波? 浅谈卡尔曼滤波眼里的机器人问题 7895次阅读
- PLC常用基本环节梯形图和详细文字说明详细资料概述 7773次阅读
- 巴特沃斯滤波器的原理_巴特沃斯滤波器优点介绍 5w次阅读
- 详细解析滤波器的定义,滤波器的特性,滤波器的工作原理,滤波器的分类,滤波器的典型电路原理图 1.4w次阅读
- 无源滤波器的原理,和无源滤波器电路设计详细解析 1.7w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1电子电路原理第七版PDF电子教材免费下载
- 0.00 MB | 1489次下载 | 免费
- 2单片机典型实例介绍
- 18.19 MB | 91次下载 | 1 积分
- 3S7-200PLC编程实例详细资料
- 1.17 MB | 27次下载 | 1 积分
- 4笔记本电脑主板的元件识别和讲解说明
- 4.28 MB | 18次下载 | 4 积分
- 5开关电源原理及各功能电路详解
- 0.38 MB | 9次下载 | 免费
- 6基于AT89C2051/4051单片机编程器的实验
- 0.11 MB | 4次下载 | 免费
- 7基于单片机和 SG3525的程控开关电源设计
- 0.23 MB | 3次下载 | 免费
- 8基于单片机的红外风扇遥控
- 0.23 MB | 3次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 2PADS 9.0 2009最新版 -下载
- 0.00 MB | 66304次下载 | 免费
- 3protel99下载protel99软件下载(中文版)
- 0.00 MB | 51209次下载 | 免费
- 4LabView 8.0 专业版下载 (3CD完整版)
- 0.00 MB | 51043次下载 | 免费
- 5555集成电路应用800例(新编版)
- 0.00 MB | 33562次下载 | 免费
- 6接口电路图大全
- 未知 | 30319次下载 | 免费
- 7Multisim 10下载Multisim 10 中文版
- 0.00 MB | 28588次下载 | 免费
- 8开关电源设计实例指南
- 未知 | 21539次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935053次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537791次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420026次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233045次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191183次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183277次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138039次下载 | 免费





 工商网监
工商网监
评论