.rarUSB接口设计.rar毕业设计(论文)OFDM通信系统基带数据.rar仓库温湿度的监测系统.rar单片机串行通信发射机.rar单片机课程设计__电子密码锁报告.rar单片机控制交通灯.rar电动
2011-10-14 13:51:26
交通灯=====看看
2016-06-24 16:47:14
C语言交通灯~~~~
2013-08-05 14:53:55
bbs.elecfans.com交通灯
2014-03-08 18:58:30
关于交通灯的资料
2013-11-21 22:52:43
AT89C51单片机交通灯控制器的设计 (1)加强对单片机控制的基础理论知识,理论运用于实际,掌握单片机设计的基本方法、步骤。(2)掌握MSC51系列单片机芯片各个端口功能、运用。(3)研究交通
2013-04-16 10:48:50
交通灯控制电路的设计分析了现代城市交通控制与管理问题的现状,结合实验阐述了交通灯控制系统的工作原理,设计出一种简单实用的城市交通灯控制系统的硬件电路设计方案。  
2008-07-21 11:20:25
请问如何使用Vhdl进行交通灯控制电路设计
2022-03-07 08:20:21
交通灯控制系统 毕业设计,求破。求程序和仿真
2016-04-07 01:28:54
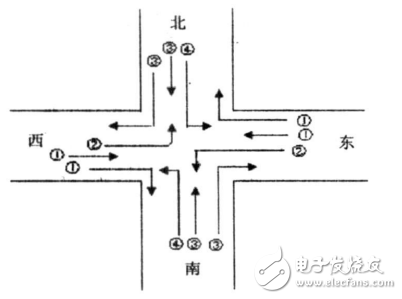
`交通灯控制系统模拟设计一、实验目的设计一个交通信号灯模拟控制系统,使其能模拟城市“十字”路***通信号灯的功能,并能进行某些特殊控制。二、实验内容与步骤1、在十字路口上,交通信号灯的变化是固定
2015-06-06 22:05:23
图3:十字路***通指示灯示意图 图4:交通灯控制系统硬件框图 3、硬件设计 本系统硬件上采用AT89C52单片机和可编程并行接口芯片8155,分别控制图2所示的四个组合
2020-07-16 10:54:09
FPGA交通灯verilog
2013-06-11 14:09:01
求大神指导关于MAX7219驱动模块的程序如何编写设计遥控交通灯控制系统,系统能够实现交通指示灯的功能,通过数码管指示剩余时间,其相关信息同时在LCD上显示,且兼有时钟日历功能。装置可通过遥控器实现
2017-03-26 12:05:33
不错的交通灯仿真,与大家分享
2016-07-10 17:18:26
大家快来看看这设计的交通灯系统
2015-09-12 21:42:14
交通灯中红灯和绿灯时间控制.红灯和绿灯的时间不同分别是20s和25s.
2012-12-10 21:16:13
交通灯设计论文资料
2013-08-22 09:57:21
怎么设计交通灯设计
2013-12-26 19:45:50
交通灯如何焊接
2019-04-03 07:56:08
`交通灯控制系统实现红绿灯、人行道以及左转弯和右转弯控制,并且根据检测的车辆流量自动调整通行时间`
2014-06-06 17:50:48
智能交通灯控制系统要求能根据车流量调整红绿灯时间,这里需要用到传感器吗?如果经过简单的处理,好像可以不用传感器,但是要用到比较复杂的算术运算程序,请问有没有人有这方面的资料啊?谢谢!
2013-03-26 12:20:07
基于51单片机的智能交通灯控制系统仿真,含有程序和PROTEUSW仿真文件!
2014-05-07 15:32:33
小弟要做智能交通灯的FPGA实现,哪位大哥能提供点参考代码啊要求实现1、初始状态下水平方向1、2号路口绿灯5s,数码管显示秒数变化。5秒后两路口垂直方向绿灯,5秒。 2、通过车辆数由实验箱上键盘输入
2009-01-16 13:01:11
智能交通灯设计 Pretus仿真 keil编程
2013-09-16 16:07:05
智能交通灯毕业设计
2014-05-21 22:24:33
本帖最后由 eehome 于 2013-1-5 09:50 编辑
毕业论文——基于单片机在智能交通灯中的应用
2012-08-16 14:01:40
本人想做毕业设计,学信息工程的,想做单片机方面的毕业设计,各位大神有啥好推荐的吗?什么交通灯、万年历感觉有点土了~所以想找个实用型的毕业设计题目,但千万不要太难喔{:19:}
2013-10-16 20:14:59
AVR单片机——交通灯控制系统(程序+原理图)
2012-08-17 16:13:15
时长与周期时长之比),不能满足交叉路口车辆的时变性要求。模糊控制技术作为智能控制的重要分支之一,它的最大特点是针对各类具有非线性、强耦合、不确定性、时变的多变量复杂系统,在各个控制领域中得到广泛的应用,并取得良好的控制效果。
2019-09-03 08:01:18
项目名称:幼儿教具--智能交通灯(人体红外检测+模拟交通等)试用计划:申请理由:基于人体红外检测检测,进行智能控制交通灯,通过演示对幼儿进行交通安全知识的进行教学培训项目名称:幼儿教具--智能交通灯
2020-10-29 14:34:57
继续通行;红灯亮时,禁止车辆通行。设计目的:设计这款交通灯模拟系统可以真实直观的反映出十字路口红绿灯亮灭情况,有利于驾驶员学习相关的交通规则,连接上相应的硬件设备还可以作为一款十字路口的交通灯控制系统
2011-12-31 11:17:20
分享一款不粗的一种基于CPLD的交通灯控制系统设计
2021-05-07 06:51:29
单片机控制交通灯单片机控制交通灯
2013-05-05 18:10:34
单片机模拟交通灯控制系统设计
2012-08-17 15:21:54
基于51单片机的交通灯 可以实现交通灯的控制时间 紧急停止按钮等。。。。本人毕业设计的成功过哦附带程序
2013-07-18 18:38:42
基于51单片机的交通灯控制系统设计,单片机自主学习项目*设计分析 —模拟LED交通灯**一、开发背景与需求1 开发背景交通事业蓬勃发展,交通流量年年增长,道路交通繁忙,经常有严重堵车现象,特别是在
2021-07-15 06:16:30
用51完成东西走向的一组交通灯的控制,用数码管显示时间
2017-01-11 07:57:40
本帖最后由 eehome 于 2013-1-5 09:45 编辑
基于FPGA技术的交通灯控制系统设计
2012-08-19 23:19:17
十字路口的交通灯有紧急暂停可以用4*4矩阵键盘输入
2019-04-28 20:20:18
应用VHDL语言设计数字系统,大部分设计工作可在计算机上完成,从而缩短系统开发时间,提高工作效率。下面介绍基于VHDL设计交通灯控制器的一种方案,并给出源程序和仿真结果。
2019-10-18 07:21:51
`求用labview做十字路口的交通灯要有倒计时能改时间能手动控制交通灯 类似于这个`
2015-06-01 10:00:09
的交通灯控制电路设计,一起来了解下吧。城市道路错综复杂,相互交错,交通灯是城市交通的重要指挥系统。交通信号灯作为管制交通流量、提高道路通行能力的有效手段,对减少交通事故有明显效果。但是车流量是随时变化的,...
2022-02-18 06:55:23
基于单片机控制的交通灯毕业设计资料
2012-08-20 12:02:55
简介本此课程设计交通灯系统利用单片机AT89C51作为核心元件,实现了通过信号灯对路面状况的智能控制。系统具有结构简单、可靠性高、成本低、实时性好、安装维护方便等优点,有广泛的应用前景。交通灯控制
2021-07-15 07:23:54
基于单片机的交通灯控制系统设计摘 要当你路过一个十字路口时,你是否注意到各个方向车辆和行人有有条不紊的通过十字路口。这样井然有序的情境靠什么来实现的呢?靠的是交通灯控制系统。在论文中我使用单片机
2021-07-19 09:37:31
单片机交通灯课程设计单片机交通灯设计(含箭头指示)大家好,我是Alex,这篇文章是我做课程设计总结后想拿出来跟大家分享。我在完成交通灯的基本显示后,我对任务提出了更高的要求,增加了交通灯箭头显示
2021-12-02 06:57:08
基于单片机的交通灯设计近年来随着科技的飞速发展,单片机的应用正在不断深入,同时带动传统控制检测技术日益更新。在实时检测和自动控制的单片机应用系统中,单片机往往作为一个核心部件来使用,仅单片机方面知识
2009-11-26 16:47:17
基于单片机的控制交通灯
2020-02-23 15:56:35
基于单片机的智能交通灯系统的设计
2013-04-20 08:35:09
本帖最后由 mr.pengyongche 于 2013-4-30 03:22 编辑
基于实时图像处理的智能交通灯控制
2013-03-18 15:12:33
如何去实现一种基于STM32的智能交通灯控制器的设计呢?有哪几种方案呢?
2021-11-26 06:50:19
基于单片机的交通灯控制实验要求有哪些?如何去实现一种基于单片机的交通灯控制实验?其实验代码该如何去编写?
2021-08-04 06:37:48
交通信号灯是城市交通安全、有序、快速运行的重要保障。本文提出一种基于单片机的交通信号灯控制系统的设计方案。该系统模拟现实中十字路口的通行指示,倒计时、紧急车辆通行、强制东西/南北通行、夜间模式灯
2021-11-09 08:46:53
设计交通灯实现如现实交通灯的功能,及用数码管显示红黄绿灯的倒计时读秒。
2019-10-10 03:32:42
怎么实现基于51单片机的交通灯的控制设计?
2021-09-23 08:03:07
课程设计任务书及成绩学生姓名 于凤明班级学号1606030113课程名称单片机课程设计题目交通灯控制设计课程设计目标与任务、计划与进度安排:实践教学要求与任务:1、了解交通灯的基本工作原理;2、用
2021-07-13 07:01:58
探究交通灯基于虚拟仪器技术labview的交通灯设计序言范文.doc
2015-06-16 18:13:13
基于FPGA的交通灯智能控制十字路口的交通灯有紧急暂停功能可以用4*4矩阵键盘输入联系QQ1227450190
2019-04-28 23:37:25
求问大神,怎么实现ATME48的交通灯系统,要求有倒计时显示,而且能够改变倒计时{:11:}{:11:}{:11:}
2014-07-03 17:06:12
`求交通灯multisim仿真`
2015-07-22 12:07:34
求一个交通灯的设计,电路图+程序。谢谢各位大神
2012-12-24 22:33:50
哪位大神给我一个单片机的交通灯毕业设计啊。先感谢了
2013-12-19 20:41:46
求一份基于labview交通灯毕业设计论文~PCB打样找华强 http://www.hqpcb.com 样板2天出货
2012-12-02 20:15:11
本人是刚入门的,做了一个交通灯,有车流检测,想通过串口,实现PC对交通灯状态的控制,以及读取交通灯状态、车流检测数量,用的是TTL,直连引脚,不懂得怎么做,求高人指点
2016-05-28 23:57:10
求基于LABview的交通灯设计十字路口的 显示倒计时能手动控制交通灯在前置面板能改时间
2015-05-31 22:39:21
描述Calliopapel交通灯,用于Calliope Mini改进版的明亮交通灯。改进的Fu?使鳄鱼夹更好地保持对称的交通灯边缘。
2022-09-09 07:54:59
有点简单,但是还想做完整点,各位拜托了!!!现在交通灯能达到的要求:1、基本的交通灯循环显示2、状态切换(正常工作和暂停工作)3、对时间进行设置4、车流量模拟检测,电脑上用按键模拟,实际用红外线做5
2014-04-24 17:20:17
经典交通灯0013、非常形象的交通灯控制设计.zip 2016-5-19 14:31 上传 点击文件名下载附件 145.09 KB, 下载次数: 29
2018-07-19 05:20:56
自己写的交通灯程序(led倒计时)另附有设计说明,功能丰富,可拿来当毕业设计。
2019-02-10 13:07:55
`新手在论坛学习了一段时间,看见有好多大侠做的交通灯的控制,也学着做了一个配合交通灯倒计时的数码显示时间,请多多指教`
2013-06-04 14:11:06
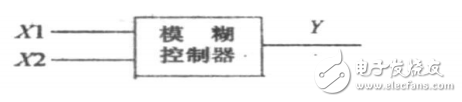
本文提出一种将模糊控制方法对单路口交通灯的实时控制系统。该系统以PLC为智能交通控制器的核心,系统编程简单、灵活,具有较高的可靠性。应用实践表明,本系统设计的模糊
2010-07-20 15:39:54 44
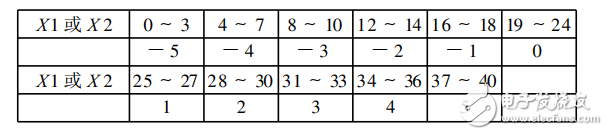
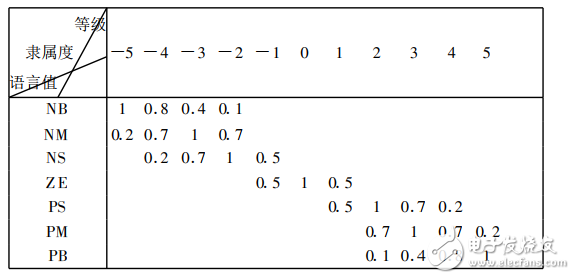
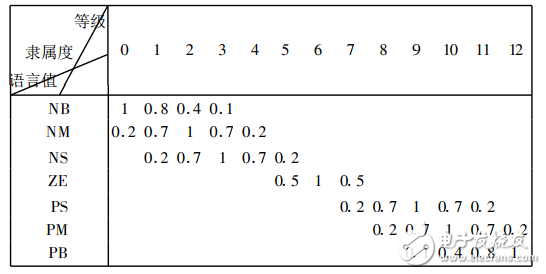
44 提出了一种基于模糊控制的交叉路口交通灯控制系统。该模糊控制系统以单交叉路车长、车长之差为输入,以绿灯延时为输出。并简单介绍了基于单片机的智能交通控制系统的实现。验
2011-12-14 11:52:54107 本文提出一种智能交通灯模糊控制的方法,利用FPGA的优势以及其软硬件协同工作带来的便利,将智能交通灯控制在FPGA上实现。由硬件实现可以看出,它能根据采集到的当前相位车流量和
2012-12-28 11:34:11 4060
4060 基于单片机控制的交通灯毕业设计资料基于单片机控制的交通灯毕业设计资料
2015-11-20 16:29:3633 基于FPGA控制的交通灯课程设计的毕业论文
2015-12-21 11:00:5427 基于单片机的交通灯设计毕业论文,基于单片机的交通灯设计毕业论文,
2016-05-10 15:12:34111 智能交通的设计,缓解城市压力,加强城市交通安全,基于plc交通灯控制系统设计。
2016-05-19 17:19:0717 摘要
本系统由单片机系统、键盘、LED 显示、交通灯演示系统组成。系统包括人行道、左转、右转、以及基本的交通灯的功能。系统除基本交通灯功能外,还具有倒计时、时间设置、紧急情况处理、分时段调整信号灯的点亮时间以及根据具体情况手动控制等功能。
2016-07-01 17:35:3815 基于单片机控制的交通灯毕业设计
2016-12-17 15:58:1415 基于PLC交通灯监控控制系统,用GX-DEVELOPER软件进行编写,用simulation模块仿真。
2017-03-21 20:31:320 交通灯控制系统设计
2017-09-21 14:36:3452 为了解决城市交通拥挤的问题,需要从供求两个方面来采取措施:一是加强城市道路的基础建设,二是要充分利用、提高现有路网的利用效率。本文提出一种智能交通灯模糊控制的方法,利用FPGA的优势以及其软硬件协同
2017-11-23 08:42:251755 本文主要介绍了自适应模糊神经网络的交通灯控制系统的设计。针对我国城市交通的现状,机动车辆数量越来越多,而传统的交通信号灯控制模式采用的是定时控制,本文将模糊控制技术引入交通信号控制,实现交通灯的自适应控制,通过大量的模糊数据输入,对神经网络进行训练,以达到全局优化的调度。
2018-01-09 13:49:042747 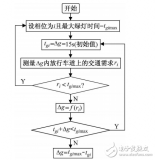
像交通灯系统一样监控您的机器
2023-03-09 15:16:32361 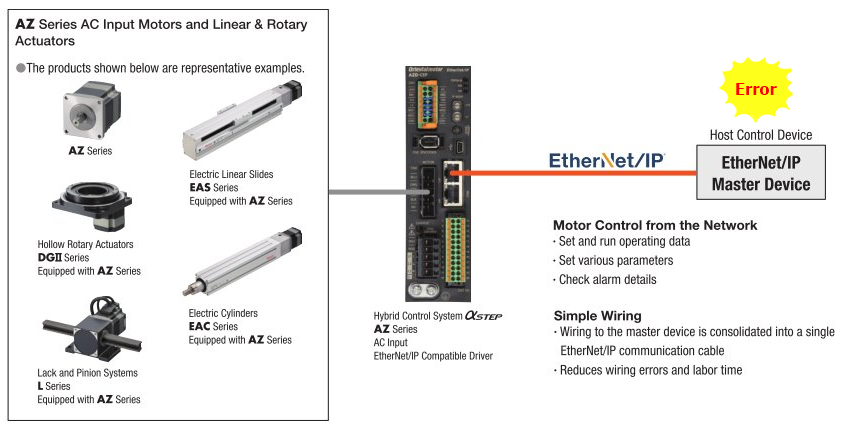
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论