利用可编程器件CPLD/FPGA实现VGA彩色显示控制器在工业现场中有许多实际应用。以硬件描述语言VHDL对可编程器件进行功能模块设计、仿真综合,可实现VGA显示控制器显示各种图形、图像、文字,并实现了动画效果。
2020-08-30 12:03:59 883
883 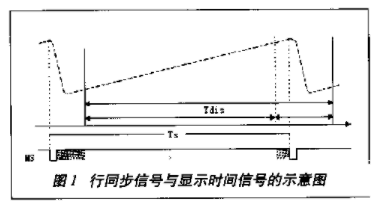
可编程器件的编程原理是什么?指令集对CPU的意义是什么?
2021-11-30 07:39:47
什么是可编程模拟器件?如何去实现相位检测器?实现可编程ADC有哪些方法?
2021-04-28 06:50:09
作者:Ron Wilson要点经济形势刺激了对可编程模拟元件的兴趣。不存在将可编程模拟芯片用于一个系统的设计流程。设计流取决于供应商为理解芯片而提供的隐喻(metaphor)。今后,这些设计流也许
2019-07-05 07:51:19
研发的PPEC OS实现各类型算法的纳秒级调度,依托PPEC Workbench图形化编程平台,为客户省去复杂的代码编写过程,低门槛,简单高效实现软件的开发。软硬件结合,让电源设计企业降低对人才层次和数量的依赖,降本且增效。请问,可编程电力电子控制器平台,可以做自激反激大功率开关电源吗
2022-07-30 17:20:20
可编程电源,顾名思义,就是可用计算机软件进行编程,利用编程来控制的电源。比如你要输出多少电压,多大的电流,这个电流要在什么样的区间内输出等等,这些功能,都可以通过计算机编程来实现。可编程电源
2021-12-30 07:06:28
可编程逻辑控制器PLC是什么?可编程逻辑控制器PLC的核心处理功能有哪些?
2021-09-18 06:15:22
可编程逻辑控制器具有哪些鲜明的特点?可编程逻辑控制器工作时主要分为哪几个阶段,有什么作用?
2021-07-05 07:59:32
可编程逻辑控制器具有哪些特点?可编程逻辑控制器有哪些应用领域?
2021-10-11 07:23:38
可编程逻辑器件是如何发展的?
2021-04-29 06:23:22
可编程序控制器(plc)应用综述phrem Ryan Alphonsusa, Mohammad Omar Abdullah摘要着自动化需求的显著增加,控制系统需要易于编程、灵活、可靠、健壮和成本效益
2021-07-12 06:31:22
可编程控制器的使用实验目的1. 了解可编程控制器(PLC)的基本原理及控制功能。2. 学习可编程控制器的接线、基本指令以及用基本指令编程的方法。3. 学习用可编程控制器控制交流异步电动机正反转的接线
2008-12-11 23:21:05
辅助触点, 完成联锁作用。2. 根据实验的体会, 试总结以可编程控制器实现应用控制一般须经过哪几个步骤?答: 以可编程控制器实现应用控制一般须经过:(1) 根据所定义的输入、输出口以及应用控制的要求编写梯形图。(2) 装接PLC控制线路。(3) 输入程序并调试。
2008-09-25 17:27:25
CEVA公司发布完全可编程的高清(HD)视频和成像平台CEVA-MM3000,该平台专为新一代联网便携式多媒体和家庭娱乐设备而设计。CEVA公司于日前在北京举办的媒体发布会上展示
2010-05-06 09:00:34
CPLD是什么?FPGA包含哪几类可编程资源呢?FPGA可编程器件和CPLD可编程器件有哪些相同点和不同点?
2021-11-10 07:42:51
PLC可编程控制器教材第一章 可编程控制器概况 可编程控制器(PROGRAMMABLE CONTROLLER,简称PC)。与个人计算机的PC相区别,用PLC表示。 PLC是在传统的顺序控制器的基础上
2012-08-12 15:49:35
PLC可编程控制器教材第一章 可编程控制器概况 可编程控制器(PROGRAMMABLE CONTROLLER,简称PC)。与个人计算机的PC相区别,用PLC表示。 PLC是在传统的顺序控制器的基础上
2012-08-12 15:52:09
S9227如何实现可编程控制需要加上什么样子的转换电路以及转换电路接到什么样子的可编程芯片能连接到LED数码管上,求大神详解并给出相应电路图
2019-06-14 15:26:35
赛灵思介绍了在系统平台的闪存系列可编程配置PROM的可编程逻辑芯片XCF08P,1至32兆位(Mbit)密度,这些PROM提供了一个易于使用,低成本高效益的可编程逻辑芯片,以及用于存储大型赛灵思
2010-04-07 13:37:44
处理程序或视频游戏。逻辑器件提供特定的功能,包括器件与器件间的接口、数据通信、信号处理、数据显示、定时和控制操作、以及系统运行所需要的所有其它功能。 固定逻辑与可编程逻辑??逻辑器件可分类两大类
2009-05-29 11:36:21
什么是可编程逻辑控制器?可编程逻辑控制器主要有哪些特点?可编程逻辑控制器主要有哪些应用领域?
2021-07-05 06:00:06
传统的嵌入式产品只能实现某种特定的功能,不能满足用户可变的丰富多彩的应用需求。为解决这个问题,本文设计并实现了一种使用Java作为软件平台的基于FPGA的可编程嵌入式系统,以实现系统对多种本地应用和网络的支持。
2020-03-25 06:30:05
基于VxWorks的MB系列智能可编程控制器设计MB系列智能可编程控制器特点是什么MB系列智能可编程控制器的软件设计的关键技术
2021-04-27 06:26:16
各位大神 求led可编程风火轮电路图(不可编程叶可以) 急... 可以求发网盘地址或865641213@qq.com
2014-10-08 16:25:13
1 引 言 在系统可编程模拟电路(In System ProgrammabilityProgrammable Analog Circuits,ispPAC)是可编程模拟器件的一种,其内部有可编程
2019-07-02 07:06:27
总结 本 文用一种全新的思路,对传统的嵌入式系统进行了改进,实现了一种能够支持多种应用的嵌入式系统平台。利用FPGA的可编程性和Java平台良好的移植性 能,该平台完全能够满足我们的设计要求。当然
2018-11-21 15:53:42
可编程电源指某些功能或参数可以通过计算机软件编程进行控制的电源。可编程电源的实现方法有很多种。其中,现场可编程门阵列(Field ProgrammableGate Array,FPGA)具有
2019-08-07 08:03:09
本文将主要介绍如何利用Lattice公司的可编程器件设计车用显示系统。
2021-05-17 06:09:40
介绍了利用现场可编程逻辑门阵列FPGA实现直接数字频率合成(DDS)的原理、电路结构和优化方法。重点介绍了DDS技术在FPGA中的实现方法,给出了采用ALTERA公司的ACEX系列FPGA芯片EP1K30TC进行直接数字频率合成的VHDL源程序。
2021-04-30 06:29:00
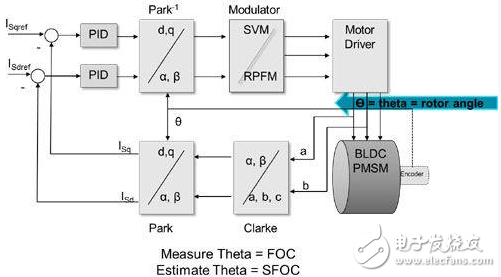
马达,因此设计人员不是应该而是必须采用更加高效的马达控制与设计。电动马达的作用就是把电能转换成为机械能,而效率则是指产生的机械能与所用的电能之比。马达的振动、发热、噪声和谐波属于各种形式的损耗,要实现高效率,就应减少这些能耗。那么有哪些设计技巧可供设计人员使用,以帮助他们实现高效率呢?
2019-09-03 06:15:33
如何利用可编程逻辑实现灵活高效的多媒体信号处理?
2021-06-02 07:25:47
设计了一个基于DSP+DDS结构的可编程调制器的硬件平台,并在此硬件平台上实现了各种模拟调制和数字调制的通用软件算法。当改变调制制式时,无需再次程序,而且调制制式、比特速率、输出中频均可调。
2021-04-23 07:04:59
可编程电源指某些功能或参数可以通过计算机软件编程进行控制的电源。可编程电源的实现方法有很多种。其中,现场可编程门阵列(Field ProgrammableGate Array,FPGA)具有性能好,规模大,可重复编程,开发投资小等优点。
2019-11-04 06:26:07
请问大佬们该如何输入并实现自己的可编程模拟电路?
2021-04-12 06:15:29
通过ARM对可编程器件进行配置的的设计和实现
2021-04-13 06:20:21
可编程电源指某些功能或参数可以通过计算机软件编程进行控制的电源。可编程电源的实现方法有很多种。其中,现场可编程门阵列(Field ProgrammableGate Array,FPGA)具有
2019-08-19 06:54:51
什么是可编程序控制器?可编程序控制器有哪些特点以及应用领域?可编程序控制器的结构是由哪些部分组成的?
2021-08-09 08:08:50
为什么要设计一种可编程嵌入式系统?基于Java的可编程嵌入式系统是如何实现的?
2021-04-27 07:20:32
本文提出一种利用复杂可编程逻辑器件(Complex Programmable Logic Device,CPLD)设计技术[3]实现专用键盘接口芯片的方案。
2021-04-15 06:55:36
新人请问:FPGA即现场可编程门阵列,其中的“现场”是什么意思?指的是什么?
2015-03-13 09:10:04
现场可编程门阵列(FPGA)是一种可编程逻辑器件,由成千上万个完全相同的可编程逻辑单元组成,周围是输入/输出单元构成的外设。制造完成后,FPGA可以在工作现场编程,以便实现特定的设计功能。典型设计工
2019-08-06 08:27:36
程控电源被广泛用于测试和测量各种电子产品,并且也正在扩展到其他行业。可编程电源用于传统电镀行业,可大大提高电镀产品的质量和自动化程度。减少开支。另外,由于可编程电源的高效率,可以大大降低许多传统
2021-12-30 07:45:49
网络型PLC可编程控制器具有哪些特点性能?
2021-10-15 08:33:41
请问各位高手,如何实现51单片机对步进电机的可编程控制?我做了实验发现直接用I/O口做频率输出端,频率输出根本不成线性。比如我要转1转/M和2转/M时,在程序里面无法控制。请问有没有好的方法?
2019-10-18 09:10:48
可编程控制器概述 第一节 可编程控制器概述 第二节 可编程控制器的特点与应用 第三节 可编程控制器的组成 第四节 可编程控制器的基本工作原理 &
2008-11-20 17:02:15 0
0 可编程控制器(PLC) PPT课件 11.1 可编程控制器的结构和工作原理11.2 可编程控制器的程序编制11.3 可编程控制器应用举例本章要求:1. 了解可编程控制器的结构和工作原
2008-12-04 14:23:220 可编程控制器原理及应用第1章 概论第2章 可编程控制器构成原理 第3章 S7-200可编程控制器 第4章 SIMATIC S7-200编程软件 第5章 S7-200 PLC基本指令 5.2 算术、逻
2008-12-30 15:35:0574 利用PSD8XXF的特性实现现场可编程门阵列的配置
2009-05-13 13:45:0817 可编程序控制器技术及应用 电子教案:第一章 可编程控制器概述第二章可编程控制器系统构成与工作原理 第三章可编程控制器基本指令 第四章可编程控制器程序设计 第
2010-03-30 17:42:460 可编程控制器控制系统设计 可编程控制器控制系统,包括电气控制线路(硬件部分)和程序(软件部分)两部分。电气控制线路是以可编程控制器为核心的系统电气原理图
2010-03-30 17:50:380 可编程定时控制器电路
2008-08-11 08:24:052992 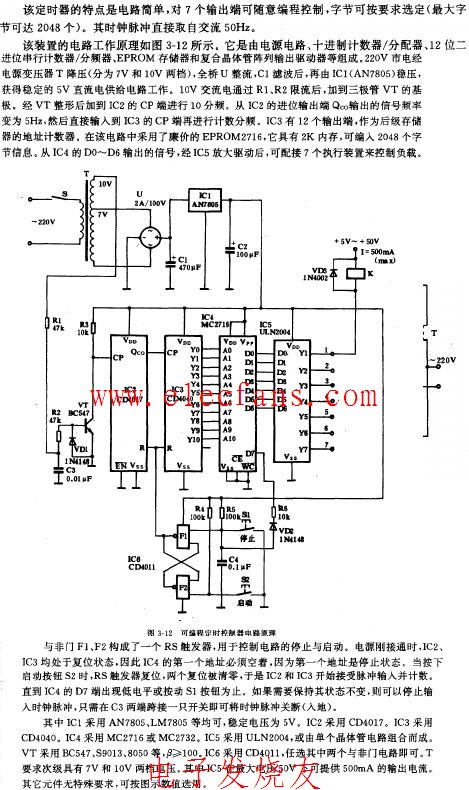
PLC可编程序控制器基础知识
PLC可编程序控制器:PLC英文全称Programmable Logic
2009-06-16 15:25:5613456 设计可编程控制系统时的故障防范
在现代化的工业生产中,大量采用了可编程序控制系统, 可编程序控制器能在恶劣的工作环境下正常
2009-06-17 14:43:01412 可编程自动化控制器PAC
近年来,可编程逻辑控制器(PLC)为OEM厂商和最终用户提供了高可靠性控制系统。然而,为实现越来越多的功能和不
2009-06-19 13:22:482448 设计可编程控制系统时的故障防范
在现代化的工业生产中,大量采用了可编程序控制系统,可编程序控制器能在恶劣的工作环 境下正常
2009-06-20 11:40:39383 全新架构PSoC扩充可编程嵌入式系统设计平台
PSoC器件采用高度集成可编程片上系统架构,将可编程模拟和数字块与微控制器合二为一的独特组合,用于嵌入式控制设计
2009-11-16 10:06:41628 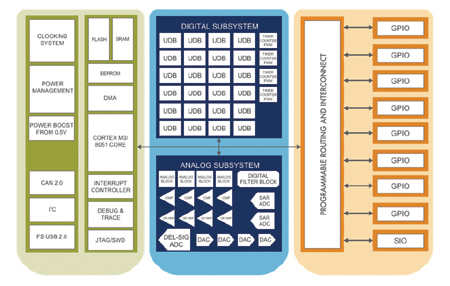
赛灵思推出DTV可编程平台
赛灵思公司日前在美国国际消费电子展 (CES) 上宣布推出首款为开发最先进数字电视 (DTV) 解决方案而优化的可编程平台。该款赛灵思消费DTV目
2010-01-09 10:38:42742 用可编程模拟器件实现直流伺服电机的速度控制
摘 要:介绍了可编程模拟器件在模拟调速系统中的应用,结合一个具体实例,给出了如何用ispPAC10实现直
2010-01-15 10:55:361021 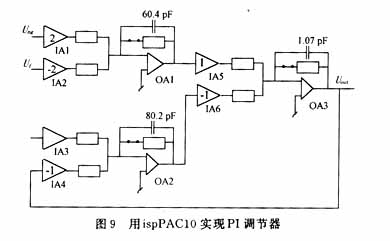
现场可编程门阵列的供电原理及应用
FPGA概述现场可编程门阵列(FPGA)是一种可编程逻辑器件,由成千上万个完全相同的可编程逻辑单元组
2010-03-17 10:44:161377 
CEVA-MM3000可编程高清视频和图像处理平台
CEVA公司发布完全可编程的高清(HD)视频和成像平台CEVA-MM3000,该平台专为新一代联网便携式多媒体和家庭娱
2010-03-22 10:05:36553 采用FPGA的可编程电压源系统原理及设计计
概述:介绍一种基于FPGA的可编程电压源系统的设计与实现。采用FPGA为控制芯片,应用Quartus
2010-03-22 14:31:442096 
可编程振荡器,什么是可编程振荡器
可编程振荡器是20世纪90年代早期为克服常规振荡器制造时间长的缺点而推出的。如图1所示,任意频率的常规
2010-03-22 14:40:142426 可编程的高清(HD)视频和成像平台CEVA-MM3000(CEVA)
CEVA公司发布完全可编程的高清(HD)视频和成像平台CEVA-MM3000,该平台专为新一代联网便携式多媒体和家
2010-03-24 12:01:411337 可编程SoC(SoPC),什么是可编程SoC(SoPC)
SOPC ( System on a Programmable Chip,片上可编程系统)是以PLD(可编程逻辑器件)取代ASIC(专用集成电路),更
2010-03-26 17:01:352336 Quicklogic ArcticLink可编程连接平台设计方案
ArcticLink可编程连接解决方案平台采用0.18um六层金属CMOS工艺制造,内核电压为1.8V,I/O电压可设定为1.8V,2.5V和3.3
2010-04-22 18:12:38815 
本项目利用LEON3的高性能、易编程、开源等优点,开发了AHB总线接口和DMA控制器,实现了Speed专用信号处理器的软件可编程,大大简化了Speed用户的开发过程
2011-06-08 10:31:311374 
可编程有源晶振的制造方式及其优点: 可编程有源晶振是由两颗芯片;一为全硅MEMS谐振器,一为具有温补功能之启动电路锁相环CMOS芯片;利用标准半导体芯片MCM封装方式完成。 可编程有
2011-06-08 18:04:421689 曾经给大家介绍过利用IPad玩的光绘。没有IPad的朋友,利用Arduino这类可编程的控制器,也可以玩出同样精彩的光绘来的。
2012-04-17 11:15:429211 电子发烧友网讯 :赛灵思(Xilinx)28nm完全可编程(All Programmable)逻辑元件将大举压境通讯与网通市场。挟高度整合设计环境(IDE)Vivado,将助力突显赛灵思完全可编程逻辑元件的系统
2012-04-18 12:09:001103 第6章 FX2系列可编程序控制器及指令系统
第7章 S7-200系列可编程序控制器.
第8章 可编程序控制器的程序设计
第9章 可编程序控制器的应用系统设计
2016-04-29 11:28:5913 第6章 FX2系列可编程序控制器及指令系统
第7章 S7-200系列可编程序控制器.
第8章 可编程序控制器的程序设计
第9章 可编程序控制器的应用系统设计
2016-04-29 11:28:5925 第6章 FX2系列可编程序控制器及指令系统
第7章 S7-200系列可编程序控制器.
第8章 可编程序控制器的程序设计
第9章 可编程序控制器的应用系统设计
2016-04-29 11:28:5927 EDA技术与可编程ASIC的设计实现,下来看看。
2016-05-19 15:16:150 用可编程控制器PLC实现模糊控制的方法研究_刘晓霞
2017-02-07 18:37:163 宣布推出全新的完全可编程多标准SoC系列,适用于包括5G演进在内的多址接入技术。Layerscape Access系列针对企业和运营商有线和无线网络、家庭网关市场的可扩展解决方案需求。该系列利用完全可编程技术,可实现下一代平台在这些市场上的快速部署。
2017-02-27 17:44:081005 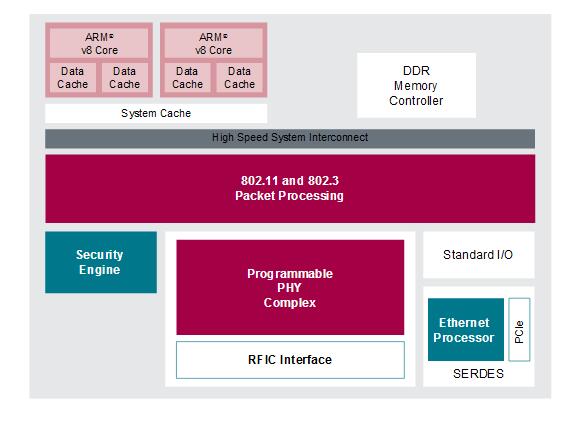
GOLD码相关性及可编程实现_蒋强
2017-03-19 11:26:541 可编程序控制器基础与编程技巧
2017-09-19 15:14:087 可编程控制器基础及编程技巧
2017-09-19 16:14:0915 PLC的发展也是与计算机技术、控制技术、数字技术、通信网络技术等高新技术的发展息息相关,正是这些高新技术的发展推动了可编程控制器的发展。本文主要介绍的就是可编程控制器的基础知识,首先介绍了可编程控制器的发展历程及特点、其次介绍了可编程控制器的原理、最后阐述了可编程控制器的应用。
2018-04-25 09:43:1856183 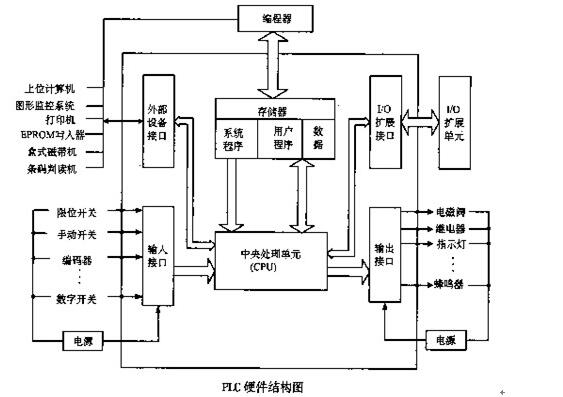
可编程控制器有两种基本的工作状态,即运行(RUN)状态与停止(STOP)状态。在运行状态,可编程序控制器通过执行反映控制要求的用户程序来实现控制功能。为了使可编程序控制器的输出及时地响应随时可能
2019-07-26 14:25:4611779 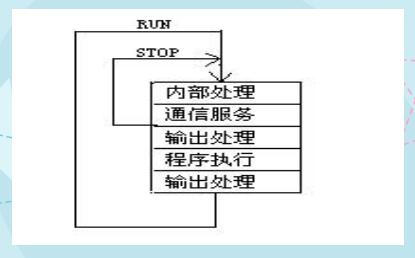
在之前的草案中,可编程控制器的定义是:“可编程控制器是一个数字操作的电子系统,设计用于工业环境。它使用可编程存储器来存储和执行逻辑操作、顺序控制、定时、计数和算术操作等操作命令,并通过数字和模拟输入和输出控制各种类型的机械或生产过程。
2020-06-08 17:28:078160 可编程控制器也即PLC,在控制系统中广泛使用。缺少可编程控制器,控制系统如同缺少灵魂。对于可编程控制器,小编曾带来部分介绍。为增进大家对可编程控制器的了解,本文将探讨为何可编程控制器可取代继电器控制技术。如果你对可编程控制器具有兴趣,不妨继续往下阅读哦。
2020-06-13 11:39:534516 可编程控制器也即PLC,在自动化行业,可编程控制器占据着重要地位。对于可编程控制器,小编在往期文章中对它的理论知识有所介绍。为增进大家对可编程控制器的认识,本文将对基于AT89C51的微型可编程控制器予以讲解。如果你对可编程控制器具有兴趣,不妨继续往下阅读哦。
2020-10-06 17:35:002333 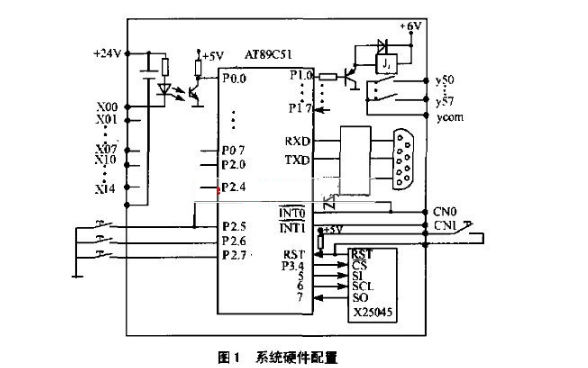
可编程控制器使用较多,因此可编程控制器具有很强的现实意义。对于可编程控制器,大家或多或少有所耳闻,但大家未必知晓可编程控制器的几大特点。本文中,小编将对可编程控制器的四大特点予以介绍。如果你对可编程控制器具有兴趣,不妨继续往下阅读哦。
2020-10-06 17:42:007650 可编程控制器可接收计数脉冲,频率可高达几k到几十k赫兹。可用多种方式接收这脉冲,还可多路接收。有的可编程控制器还有脉冲输出功能,脉冲频率也可达几十k。有了这两种功能,加上可编程控制器有数据处理及运算
2020-10-06 17:43:006205 可编程控制器原理及应用资料免费下载。
2021-04-25 11:20:1419 基于可编程逻辑的SDRAM控制方法设计
2021-06-30 10:16:148 片上可编程系统SOPC是一种灵活、高效的SoC解决方案,而FPGA 是可编程再设计的“万能”芯片,FPGA是作为专用集成电路(ASIC)领域中的一种半定制电路而出现的,在硅片上预先设计实现的具有可编程特性的集成电路,未来的FPGA芯片密度不断提高。
2021-10-01 09:07:001614 可编程逻辑控制继电器 可编程逻辑控制继电器是一种“可编程序”、“通用”、“智能化”控制继电器,不同厂商的产品有不同的名称,如,德国金钟-默勒公司的“easy”控制继电器;西门子公司的“LOGO
2022-11-01 13:16:20818 早期的可编程控制器称作可编程逻辑控制器(Programmable Logic Controller),简称PLC,它主要用来代替继电器实现逻辑控制。随着技术的发展,这种装置的功能已经大大超过了逻辑
2023-04-19 09:59:101 可编程控制器(Programmable Logic Controller,PLC)是一种使用数字计算机技术和专用外设实现工业过程自动化控制的设备。它在工业生产中起到了非常重要的作用。本文将详细介绍
2024-01-18 11:18:51376
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论