可利用 Artix-7 FPGA 和 Xilinx 机器视觉合作伙伴 Sensor to Image 的 IP 实现多标准的可扩展摄像机平台,与之前的工业摄像机设计相比,其具有最佳的功率性能、最低的功耗和更低的总体 BOM 成本。
2014-12-31 11:04:34 1402
1402 
摄像机标定是什么?如何对摄像机标定进行分类?传统摄像机标定方法分为哪些?摄像机自标定方法有哪些?
2021-04-13 06:10:19
在机器视觉中,怎么标定坐标原点啊,我用的图像匹配可以标定一个坐标原点,但是在不同的图像上会有偏移,怎么才能减小偏移呢。求大家指教一下
2013-01-18 15:53:54
本帖最后由 lilin0734 于 2017-11-15 20:09 编辑
机器视觉手眼标定
2017-11-06 10:45:41
、圆和椭圆3.9 摄像机标定3.9.1 面阵摄像机的摄像机模型3.9.2 线阵摄像机的摄像机模型3.9.3 标定过程3.9.4 从单幅图像中提取世界坐标3.9.5 摄像机参数的准确度3.10 立体
2016-06-29 13:48:38
是摄像机、转鼓等,它们都把三维的影像作为输入源,即输入计算机的就是三维管观世界的二维投影。如果把三维客观世界到二维投影像看作是一种正变换的话,则机器视觉系统所要做的是从这种二维投影图像到三维客观世界
2019-07-08 08:30:00
,相对于立体视觉中摄像机间的标定,这种方法只需对摄像机内参数进行标定,提高了系统的效率。4.定位算法基本过程:简单的算法过程,可基于OpenCV进行简单实现。输入通过摄像头获取的视频流(主要为灰度图像
2019-06-08 08:30:00
我现在搞试验机,标定速度。单片机驱动步进电机驱动器,控制油缸的速度,还有个油箱。现在有个问题,速度不成比例,标定出来一个系数。然后控制油缸速度,设定0.5mm/s,1mm/s,2mm/s速度,结果油缸的速度不成比例,不是1:2:4的比例。不知道为什么。请高手指教,谢谢!
2019-09-10 14:33:59
``【课程推荐】龙哥手把手教你学LabVIEW机器视觉设计教程请问哪位大神有Labview机器视觉相机标定的程序文件,麻烦分享一下?在下不甚感激!qq:599108466.``
2016-05-25 12:36:45
的USB摄像机主要就是高分辨率和高帧率的USB3.0以及低分辨率的USB2.0。USB摄像机的方案主要分为三类:FPGA架构,ARM架构,单片机架构。FPGA架构的USB摄像机是从机器视觉相机中发展而来,主要是由于FPGA的灵活性,能应对机器视觉对单一环境,获取较好的图像效果,同时...
2022-02-17 07:21:11
VISION控制器标定及网络分析工具
2021-01-19 07:25:37
最近在学习NI 视觉助手的标定训练,想请教一下:在标定时我们输入的一般是一个标定板1,如果图像有较大的畸变失真(这里有个问题1:这个失真是指我要检测的图像存在失真还是指拍摄的标定板图像的失真?)则需
2016-06-13 11:14:32
labview视觉九点标定程序分享下,感谢各位大佬
2021-01-25 18:08:29
最近在做视觉,需要用labview做相机的标定,通过空间转换确定空间位置。视觉助手的标定只能标定内参数,没有办法做内外参数的标定,哪位大神给指导指导如何做一个标准的标定程序。
2017-04-24 16:08:44
OpenMV项目旨在通过开发开源的低成本机器视觉摄像机,为业余爱好者和制造商提供机器视觉。第一代OpenMV摄像机基于STM32F ARM Cortex-M MCU和Omnivision
2020-09-29 14:49:30
双目视觉的原理:由于视差原理,左右两个ccd的位置固定,若能测量空间中同一个点P在左右两个ccd中图像的位置,则根据三角原理,可以求得P点在空间中的坐标位置。可用于摄像头实现空间点的距离测量。下图
2021-09-27 16:52:18
人工智能强化学习在汽车标定领域的方案,随着国六标准的实施,RDE测试提高不断要求,通过强化学习算法,构建机器学习模型,设定更严格的参数寻找更优的目标,在虚拟环境中推演RDE测试下的排放情况,提升标定效果,大幅度压缩实验室标定周期,降低标定成本。
2021-09-09 15:01:39
不断涌入,这又是为什么?首先,我们来分析一下机器视觉的前景:1)人才需求巨强烈,高端人才特稀缺 中国正在成长为继美国、日本之后的全球第三大机器视觉市场,其应用领域几乎要涵盖了国民经济发展的各个行业,而
2019-07-02 10:23:22
表面的三维信息和由摄像机成像的几何模型;(3)获取和发送目标点的坐标视觉定位系统的目标就是为了找出目标物在工业机器人的基础坐标系上的坐标,然后把摄像机获得的标定与图像在工业机器人的基础坐标系上的坐标联系起来
2021-11-17 11:27:44
不依赖于标定参照物,仅利用摄像机在运动过程中周围环境图像与图像之间的对应关系来对摄像机进行的标定的方法称为摄像机自标定方法。目前已有的自标定技术大致可以分为基于主动视觉的摄像机自标定技术、直接求解
2019-06-04 08:00:00
本系统搭建了基于单目视觉的SCARA机器人硬件平台,并使用圆形供料盘混合投放多种颜色的保险片,利用CCD摄像机获取保险片的图像信息,从图像中提取其轮廓形状及坐标信息,并利用摄像机参数标定,通过坐标变换得到保险片在机器人坐标系的空间坐标,然后控制SCARA机器人夹爪对保险片工件进行精确定位和抓取。
2019-06-19 06:30:00
参数在计算机标定的时候计算出来即可,其矩阵表示如下: 以上就是整个摄像机标定的基本原理和相关概念,在机器3D视觉计算中,先要通过标定确定这些参数,通常的做法是通过一些包含了非常明显的图案样本(棋盘
2018-09-28 10:32:24
`针对工业生产中某些精密零件需要机器视觉检测来检验合格性的要求,介绍了一种基于STM8S单片机的机器视觉检测平台的设计方案,阐述了对伺服电机的控制原理与控制方案,实现了梯形加减速的效果,可准确到达
2021-01-06 18:07:24
利用LABVIEW视觉模块完成摄像机标定,一般需要哪些vi?相关参数怎么设置?
2015-05-17 17:24:58
概述在新能源汽车测试领域中,新能源汽车的驱动电机控制电流需要进行台架标定,目前电机台架标定中控制电流的标定是通过手动方式进行的,手动标定电机控制电流,对匹配工程师的技术要求高、工作强度大、标定周期长
2021-08-27 06:01:41
现在有一款相机配合远心镜头使用,产品比较小,比较精密,视野也很小,差不多也就1厘米吧,像这种情况一般怎么进行标定,是用那种比较精密的标定板吗?还有别的办法吗?论坛有视觉大神答疑解惑吗?
2020-01-03 16:58:31
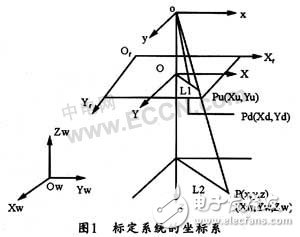
cO 1 为摄像机的焦距f 。 图1 移动机器人视觉系统的坐标关系 不考虑透镜畸变, 则由透视投影成像模型为: 式中, Z′= [u, v ]T 为目标特征点P 在图像坐标系的二维
2019-06-01 08:00:00
在机器视觉应用中,标定板的使用非常必要,因为对于精度测量来讲,镜头本身的畸变不可避免,同时又需要达到客户满意的精度,因此要求本身的图像就非常真实、准确,否则软件水平再高,那也是基于有误差的图像
2022-02-25 09:55:55
不断涌入,这又是为什么?首先,我们来分析一下机器视觉的前景:1)人才需求巨强烈,高端人才特稀缺中国正在成长为继美国、日本之后的全球第三大机器视觉市场,其应用领域几乎要涵盖了国民经济发展的各个行业,而工业
2019-07-02 13:55:12
有个项目要用视觉定位,视觉拍好产品之后,把产品的坐标发送到PLC,PLC再执行定位指令。现在查到的资料都没有涉及这一块,都是讲相机标定,而不是手眼标定。哪位有这方面的资料,怎么用labview实现手眼标定?
2020-05-28 14:42:35
光学标定板应用领域宏诚光学玻璃系列标定板和陶瓷系列标定板是专为高校实验、研究单位项目研发和机器视觉集成商产品标定等等客户群体使用的常用标定工具,能够方便获得相机的标定数据。标定板作用:为校正镜头畸变
2022-09-20 08:14:32
在计算机视觉中,二维计算机坐标和三维物体空间坐标的关系可通过摄像机模型来建立。模型中的参数包括:摄像机几何、光学特性参数(内参数)及摄像机空间位置参数(外参
2009-08-05 15:29:16 41
41 本文给出了robocup 中型组足球比赛机器人在全维视觉情况下,对足球比赛中目标定位的一种方法。文中推导了一种针对全向摄像机镜面投影的变换关系,该方法简单有效,为全维
2009-08-14 09:37:3921 本文给出了robocup 中型组足球比赛机器人在全维视觉情况下,对足球比赛中目标定位的一种方法。文中推导了一种针对全向摄像机镜面投影的变换关系,该方法简单有效,为全维
2009-08-14 09:38:448 天津机器视觉非标定制,天津计算机视觉,芯片分选检测机全自动上下料、分选芯片
2023-02-21 10:26:40
基于视觉系统的移动机器人导航技术是近年来移动机器人研究领域的一个热点,而摄像机标定是视觉系统的基础,它建立了摄像机系统尺寸(像素)和已知的三维世界坐标系系统
2010-01-20 14:08:3738 视觉传感器的标定技术
双目视觉传感器由两台性能相同的面阵CCD摄像机组成,基于立体视差的原理,可完
2009-11-07 11:42:011723 利用机器视觉的摄像机标定方法研究
机器视觉的基本任务之一是从摄像机获取图像信息并计算三维空间中物体的几何信息,以由此重建和识别物体。而空间物体表面某
2010-03-04 10:04:541006 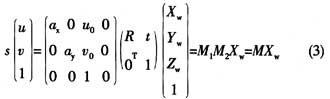
以简化以往的摄像机标定技术为研究目的,分析了标定算法对于前期图像处理的要求,给出了基于MATLAB 的简易 摄像机 标定方法。该方法借助于常用软件完成了以往摄像机的标定算法中的
2011-06-13 15:52:4039 采用直线对应法和基于最小二乘的标定方法对摄像机和光刀进行标定,设计并实现了三维扫描仪系统的标定,经试验表明,此方法简单易行,计算结果精度高,对数据测量的精确性和可
2011-10-10 10:38:4818 提出了基于平面单应性矩阵的摄像机标定算法,通过摄像机标定对检测区域进行网格划分,从而进行车辆速度的检测。经实验测试,该方法易于实现,且具有较高的检测精度,平均测速准确率
2011-11-10 14:35:3651 首先介绍了B-dual-space的概念和基本性质;并将B-dual-space与张正友的平板标定法相结合,提出了改进型的平面标定算法,这一方法继承了张的方法中二阶畸变模型的使用,相较Tsai的方法畸变模
2011-11-30 17:17:3618 提出了一种改进标定法.该方法采用分步标定的思想,以创建的平面模板为标定物,利用共面点便可线性求解出摄像机的内外参数.建立的摄像机模型考虑了径向畸变,有利于提高标定精度
2012-04-26 15:29:2328 介绍了一种线性模型下的摄像机标定方法。在获取交通视频的基础上,利用实际路面上的参照物和图像处理的基本知识抽象出交通视频中的像素行和路面实际距离之间的几何模型,对几
2012-05-28 16:26:4743 本文介绍了一种线性模型下的摄像机标定方法。在获取交通视频的基础上,利用实际路面上的参照物和图像处理的基本知识抽象出交通视频中的像素行和路面实际距离之间的几何模型,
2012-05-29 16:58:1283 基于B-dual-space的摄像机标定
2015-11-18 16:40:220 本文CameraCalibrator类源代码来自于OpenCV2 计算机视觉编程手册(Robert Laganiere 著 张静 译) 强烈建议阅读机器视觉学习笔记(4)——单目摄像机标定参数
2017-02-08 03:36:38523 (4)——单目摄像机标定参数说明 机器视觉学习笔记(5)——基于OpenCV的单目摄像机标定 机器视觉学习笔记(6)——双目摄像机标定参数说明 1.双目摄像机标定目的 双目摄像机标定最主要的目的就是要得出左右两个摄像机的相对位置关系,但是在OpenCV中,计算表示左右摄像机位置的矩阵R和T的同时,也可
2017-02-08 03:41:12578 Dragoboard410c开发板为平台进行简单的3D视觉实验,这里我们将涉及到3D视觉中的摄像机标定、姿势估计、对极集合和3D图像中的深度地图等内容。
2017-02-15 10:11:221695 混合摄像机视觉伺服机器人研究与应用_陈丹
2017-03-19 19:07:040 一、哪些情况需要标定零点 零点是机器人坐标系的基准,没有零点,机器人就没有办法判断自身的位置。 机器人在如下情况下要重新标定零点: 1.进行更换电机、机械系统零部件之后。 2.超越机械极限
2017-09-19 18:31:0815 摄像机标定是机器视觉和摄像测量领域相对基础的工作,同时也是最复杂、困难的T作。摄像机标定的意义是得到立体空间中对象的几何信息,其中所使用的图像信息由双目摄像机所得。定后的双目摄像机得到的图像目标信息
2017-11-06 14:41:0530 问题,、提出一种基于双目视觉的投影仪标定算法,将投影仪视为逆向相机,利用一个辅助相机捕获投影于不同位置标定平面,确立摄像机图像与标定平面之间的对应关系,然后利用极线原理得到摄像机图像与投影仪图像之间的对应关
2017-11-06 15:30:2120 使用LabVIEW和用于DENSO的ImagingLab Robotics库,机器视觉和机器人系统可以集成在一个应用程序中。本文介绍了使用相同坐标系统在机器视觉系统和机器人系统之间进行标定的方法
2017-11-17 17:03:2512639 摄像机标定是三维重建时的必要步骤。传统的标定方法对设备要求高、操作繁琐,而自标定方法虽然简便,但精度不高,会严重影响三维重建的效果。因此,越来越需要一种操作简便并且精度高的自标定方法。采用SIFT
2017-11-21 15:01:163 针对自由双目立体视觉中由于摄像机旋转导致的摄像机外参数变化的问题,提出一种基于旋转轴标定的动态外参数获取方法。在多个不同位置,立体标定得到多组旋转平移矩阵,利用最小二乘法求解旋转轴参数;结合初始位置
2017-11-25 11:27:150 针对目前基于视频的车辆测速方法均需通过手工标定而造成的低效和可操作性差的问题,提出了一种对典型配置的道路监控摄像机的焦距、俯仰角、离地距离等重要参数进行自动标定的方法。首选利用自然场景中两组正交
2017-11-29 16:47:580 针对无人车(UGV)自主跟随目标车辆检测过程中需要对激光雷达(LiDAR)数据和摄像机图像进行信息融合的问题,提出了一种基于梯形棋盘格标定板对激光雷达和摄像机进行联合标定的方法。首先,利用激光雷达
2017-11-30 16:23:127 我们首先介绍下计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系。以及他们之间的关系。然后介绍如何使用张正友相机标定法标定相机。摄像机标定(Camera calibration)简单来说是从世界坐标系换到图像坐标系的过程,也就是求最终的投影矩阵的过程。
2017-12-04 16:56:3517861 
可选参数进行摄像机标定的程序。calibration_artificial.cpp 是程序模拟模拟摄像机标定的过程,即程序创建棋盘然后自主标定。
2017-12-04 17:23:263427 
为提高场景摄像机的标定精度和标定效率,本文利用摄像机透镜成像原理,基于针孔成像模型,提出了一种基于单幅二维图像的摄像机标定方法。该方法利用最小二乘法直接计算世界坐标系与计算机图像坐标系之间的数学模型
2017-12-15 11:04:185 针对现有的线结构光视觉测量系统现场标定方法存在效率低、操作复杂等不足,提出了一种基于自由移动平面靶标的标定方法。该方法以平面靶标作为标定对象,首先采用张正友的方法标定出了摄像机内部参数,然后引入
2018-03-15 11:22:314 双目立体视觉中在对物体进行三维测量或精准定位时,需要对摄像机进行标定以获得其内外参数。研究径向畸变摄像机模型,构造了基于一阶径向畸变( RAC)算法的双目摄像机内外参数线性求解公式。考虑侧倾角、旋转
2018-12-27 17:04:5211 在机器视觉的测量中,我们得到的尺寸并不是我们真实的物体尺寸,而是像素值,那么如何将像素值转成我们需要表示的实际物体尺寸,此时,需要进行坐标的标定。
2018-12-29 13:56:334012 相机标定可以说是计算机视觉/机器视觉的基础,但是初学者不易上手,本文将给读者整理一遍相机标定的逻辑,并在文末回答评论区提出的问题。分为以下内容:
2019-06-01 09:54:153971 
建立摄像机的模型,在Tsai方法基础上,改进算法,对摄像机的内、外部参数进行了标定。试验结果表明,该方法明显好于传统的Tsai方法,可以准确得到水平方向不确定比例因素s。再结合Tsai方法,可以准确获得其余的标定参数。
2019-10-31 16:20:055 摄像机通过成像透镜将三维场景投影到摄像机二维像平面上,这个投影可用成像变换(即摄像机成像模型)来描述。摄像机成像模型分为线形模型和非线性模型。针孔成像模型就属于线形摄像机模型,本文就讨论在这种模型
2020-07-31 09:49:281278 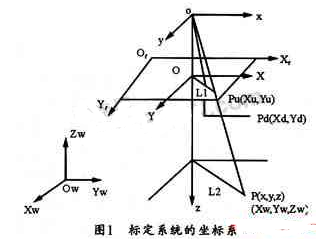
采用张正友提出的基于2D平面棋盘格的摄像机标定方法,利用Matlab摄像头标定工具完成相机参数的标定。
2020-08-31 10:04:124715 
常见的机器人视觉伺服中要实现像素坐标与实际坐标的转换,首先就要进行标定,对于实现视觉伺服控制,这里的标定不仅包括摄像机标定,也包括机器人系统的手眼标定。
2020-09-10 16:40:233704 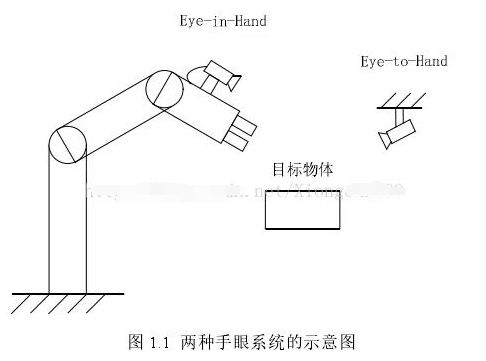
但是在实际应用中并非如此,我们无法严格控制像平面和被测平面的位置,所用的镜头也不是严格的小孔模型。如果直接使用【1】式计算将会产生极大的误差。因此,为了获取更高的测量精度,我们需要通过标定来实现坐标平面的转换以及图像的校正。
2020-11-03 09:42:2815106 
法需要的高精度标定物的缺点,而仅需使用一个打印出来的棋盘格就可以。同时也相对于自标定而言,提高了精度,便于操作。因此张氏标定法被广泛应用于计算机视觉方面。 张正友标定法的标定板 今天,我们就来讲解一下张
2020-12-31 10:06:195420 
组成的多轴系统、Scara四轴机器、六轴机器人(在运行过程中保证几个自由度不动,运行即可) 一、 标定介绍 1. 标定模型A:相机固定(夹具不旋转) 夹具夹取产品或者标定块,选取一个特征,开始进行标定 X轴、Y轴移动一个位置,记录轴的物理坐标
2021-05-08 10:05:1834068 
相机固定不动, 上往下看引导机器人移动 机器人与视觉标定理论详解 1.相机非线性校正使用标定板做非线性校正2.相机与机器人做9点标定可以使用机器人扎9个点,或者机器人抓住工件摆放9个位置,得到
2021-05-27 14:15:533251 
在大多数条件下,这些参数必须通过实验与计算才能得到。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。
2022-06-21 11:12:347612 文中提出的方法介于传统标定法和自标定法之间,但克服了传统标定法需要的高精度标定物的缺点,而仅需使用一个打印出来的棋盘格就可以。同时也相对于自标定而言,提高了精度,便于操作。因此张氏标定法被广泛应用于计算机视觉方面。
2022-08-22 10:07:232538 首先,激光器投射结构光平面到平面棋盘格上形成激光条纹,并通过CCD 摄像机采集激光条纹图像。然后,对图像进行处理,提取激光条纹上的两个特征点。控制机器人按照一定的约束进行运动,从一个标定位置移动
2022-11-09 10:26:091439 结构光视觉传感器参数的标定包括:摄像机参数标定、结构光平面参数标定。
2022-11-09 10:05:561039 法需要的高精度标定物的缺点,而仅需使用一个打印出来的棋盘格就可以。同时也相对于自标定而言,提高了精度,便于操作。因此张氏标定法被广泛应用于计算机视觉方面。
2022-11-14 10:14:402382 背景介绍 准确标定像机对于所有的机器/计算机视觉的成功应用都是非常重要的。然而,对于标定板,有不同的模式可供选择。为了方便进行选择,本文将解释每种方法的主要好处。 标定板的选择,有CharuCo
2023-01-17 15:13:59598 常见的机器人视觉伺服中要实现像素坐标与实际坐标的转换,首先就要进行标定,对于实现视觉伺服控制,这里的标定不仅包括摄像机标定,也包括机器人系统的手眼标定。 以常见的焊接机器人系统为例,有两种构型。
2023-02-06 15:24:211136 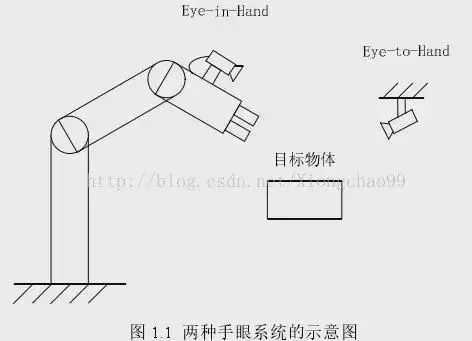
由于OpenCV中cvStereoCalibrate总是会得到很夸张的结果(见下文5.1问题描述),所以最后还是决定用Bouguet的Matlab标定工具箱立体标定,再将标定的结果读入OpenCV,来进行后续图像校准和匹配。
2023-03-21 10:17:28714 一、为什么要进行摄像机标定 随着机器视觉的迅猛发展,我们已经不满足于使用摄像机进行监控、抓拍这种较为简单的功能。更多的用户青睐于它在非接触三维尺寸测量上的应用。我们所谓的三维测量是广义的三维测量
2023-06-19 10:57:04975 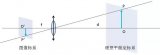
一、为什么要进行摄像机标定 随着机器视觉的迅猛发展,我们已经不满足于使用摄像机进行监控、抓拍这种较为简单的功能。更多的用户青睐于它在非接触三维尺寸测量上的应用。我们所谓的三维测量是广义的三维测量
2023-06-20 11:00:03913 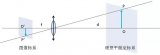
张正友标定方法是一种经典的相机标定方法,目前是最受欢迎的方法之一。该方法通过一种机器学习的方法,利用大量匹配的数据点像素坐标、世界坐标,基于极大似然估计拟合得到一个最优解。
2023-08-03 10:59:12641 
常见的机器人视觉伺服中要实现像素坐标与实际坐标的转换,首先就要进行标定,对于实现视觉伺服控制,这里的标定不仅包括摄像机标定,也包括机器人系统的手眼标定。
2023-08-04 11:48:47579 
对于摄像机标定问题已提出了很多方法,摄像机标定的理论问题已得到较好的解决,对摄像机标定的研究来说,当前的研究工作应该集中在如何针对具体的实际应用问题,采用特定的简便、实用、快速、准确的标定方法。
2023-08-04 12:54:171387 
机器人标定技术是提高机器人末端绝对定位精度的重要方法。可分为三个层次:一是关节级标定,二是机器人运动学标定,三是机器人动力学标定。
2023-09-15 09:49:521225 
利用本质矩阵和基本矩阵的摄像机标定方法;利用主动系统控制摄像机作特定运动的自标定方法(主动视觉标定方法)。
2023-10-16 11:42:11253 
这个逼近的过程就是「相机标定」,我们用简单的数学模型来表达复杂的成像过程,并且求出成像的反过程。标定之后的相机,可以进行三维场景的重建,即深度的感知,这是计算机视觉的一大分支。
2023-10-18 17:00:07476 
空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系是由摄像机成像的几何模型决定的,这些几何模型参数就是摄像机参数,为了得到这些参数而进行的实验与计算的过程称为摄像机标定。
2023-10-19 17:31:56544 
空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系是由摄像机成像的几何模型决定的,这些几何模型参数就是摄像机参数,为了得到这些参数而进行的实验与计算的过程称为摄像机标定。
2023-11-03 11:07:58479 
那么什么是标定呢?标定(calibration)包含两方面的意思:一是指使用标准的计量仪器对所使用仪器或设备的准确度(精度)进行检测,确认是否符合标准;二是校准,消除误差。
2023-11-10 10:09:03961 
作为无人车以及智能机器人而言,在装配过程中各个传感器之间的外参标定一直是比较头疼的问题。这里作者也系统的学习了一下,传感器的外参标定和在线标定问题。
2023-11-20 15:45:05302 
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论