大学老师要求做一个通用的12v机器人充电器设计方案,没有一点头绪,应该怎么写推荐课程:张飞硬件电路P1训练营(1-5部)http://t.elecfans.com/topic/33.html
2019-03-28 22:55:59
有什么机器人技术的资料?单片机开发的.
2011-06-21 10:42:25
20世纪以来随着电子技术的不断发展,以及人类对于自身的不断了解,机器人的研究也在不断的深入。现阶段能做出外表接近人类的机器人,走路接近人类的机器人……但这些都属于很前沿的领域,研究门槛高,实际的商业用途不是很广,所以大多还停留在样品阶段,走进市场的很少。
2019-10-16 08:27:30
有没有机器人比较全的资料
2017-03-21 12:35:21
请各位大神指导,移动式机器人是怎么做EMC保护的,机器人是锂电池供电,所以就不能接大地了,那么对机器人的干扰是通过何种方式来释放或转移的?
2016-07-26 13:33:14
机器人有哪些种类?大家来说说
2014-12-25 10:01:32
机器人有哪些类型?
2021-06-18 06:41:57
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
了。机器人:摔跤了吗?我:没摔。机器人:与前面矛盾了。你应该摔跤。我:……人工智能可以不断地从具体事例中归纳出道理或对规律的认识,道理积累多了,就可以形成一套系统的规则。大家看这样的思路有可行性吗?
2016-03-09 14:29:12
机器人的运动原理还是属于最基本的简单机械。机器人运动主要是依靠什么装置?有些什么装置是机器人用的比较多的?
2015-02-03 11:22:01
如题。机器人的这个备份系统问题。想求大神讲解一下哈。
2015-01-16 10:38:44
现在想做机器人图像识别方面的研究,有问题请教大家,比如说:现在有十种瓶子,机器人能识别我指定的瓶子,并把它从A位置移动到B位置,关键是如何识别呢,不是很清楚,求大神指点!在此感激不尽!
2019-11-04 09:02:57
想弄一个vi可以动态显示机器人的姿态,但不知道有什么函数可以引入机器人的模型,帮帮忙,谢谢。
2012-02-11 17:25:22
移动机器人有没有推荐的MCU,萌新求大佬帮助
2020-11-03 11:41:09
钢琴曲目的机器人,只需要它实现能弹奏曲目。因为现在刚刚接触机器人制作方面,只懂一些中断和舵机啥的,不知道做成的难度有多大,,,,希望各位前辈能够不舍赐教。如果能做成,都需要实现哪些模块呢?!
2017-05-22 17:09:06
钢琴曲目的机器人,只需要它实现能弹奏曲目。因为现在刚刚接触机器人制作方面,只懂一些中断和舵机啥的,不知道做成的难度有多大,,,,希望各位前辈能够不舍赐教。如果能做成,都需要实现哪些模块呢?!
2017-05-22 17:06:22
PID控制的优点有哪些?机器人控制技术有哪些重要性?
2021-06-18 08:02:56
ARM机械手臂有各种形状和大小。机械臂是机器人的一部分,用来定位末端执行器和传感器来完成编程任务。许多(但不是全部)类似于人类的手臂,有肩膀,肘部,手腕,甚至手指。这给了机器人很多方法来定位它自己在它
2022-03-31 10:31:31
机器人的优缺点有哪些?机器人是由哪些部分组成的?
2021-10-11 07:51:29
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
笔记本电脑(Notebook)当作主控,撰写人机接口主控程序,以射频(RF)无线模块进行沟通,主控计算机可下达指令给机器人并接收机器人的状态回传数据。本文设计的主题是将此机器人群控系统应用于两种机器人队形变换,分别是横纵队形变换跟四角位置队形变换。
2019-06-27 07:02:14
`据传奥地利发生了一起机器人自杀事件,自杀的机器人叫Roomba 760。据说这位机器人自杀的原因是忍受不了繁重又无限重复的清洁工作,而选择了***。***之后是这个样子滴是不是渣都木有了`
2016-01-05 11:07:53
为主,尽管机器人开始有搭载摄像头的趋势,但对视觉的理解仍然较低,往往需要有明显的特征点作为辅助,同时抗干扰能力弱,对光照条件,部分遮挡等常见题目不能找到可靠的方法。 机器人技术对图像理解的要求是迫切
2015-01-23 15:02:27
机器人设计方案{:7:}分享
2014-06-30 13:12:48
解读ATmega32机器人系统电子电路
2019-09-19 08:33:59
传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或未知的环境中完成一定的作业功能,是因为它能够通过传感器感知外部环境信息和自身状态,获得反馈信息,实现系统的闭环控制。目前在仿人机器人
2019-09-18 06:17:46
家庭服务机器人是机器人的发展方向,是我国进一步加强机器人技术研究的突破口。家庭服务机器人旨在将家庭成员从家居的繁琐家务中解放出来,给家庭成员提供帮助、娱乐等。
2019-08-20 06:57:41
文中提出的TMS320DM6437+TMS320F28015的软硬件设计方案在新型球形机器人控制系统中得到初步应用,验证了理论设计的可行性和可靠性,实验结果表明接口数据读写高效可靠。本设计对以后其他双核控制系统接口的设计与研究工作具有很好的参考价值。
2021-05-27 06:46:44
自动或半自动机器人常常需要嵌入式控制系统,从而能够结合高度智能化的确定性控制,并且可以方便地连接到不同的传感器和执行器上。NI提供了多种嵌入式硬件平台,以满足复杂系统的需求。从尖端的机器人研究项目直至高级行业应用,NI平台被证实是高效的机器人解决方案。
2019-11-06 07:50:49
的共同作用下。中国服务机器人产业初具规模并在未来拥有极大的发展潜力。今天的机器人方案以电影院迎宾机器人为例功能介绍<section]迎宾接待:自动感应人体,主动播放欢迎语、欢送语主动避障
2020-09-21 11:41:20
申请理由:项目前期测试,需要硬件平台,而mBot机器人套件是一个很好的平台。相信通过mBot机器人套件的帮助,我们会更加了解智能平台。项目描述:清洁机器人功能丰富,其前期设计为带有机械臂,可以通过
2015-11-02 11:18:45
`清洁机器人是服务机器人的一种,所谓服务机器人是指自主或半自主的、从事非生产活动、能完成有益于人类健康的服务工作的机器人。家庭清洁机器人集机械、电子、传感器、计算机、控制、机器入技术、人工智能等诸多
2014-01-04 09:00:15
的高空作业危险,而且其操作简单、使用方便,应用价值高,市场前景广阔。 1 玻窗清洁机器人系统总体结构 该玻窗清洁机器人系统由手势识别和清洁机身两个部分组成,如图1所示。手势识别部分利用MXC6202
2011-09-08 15:51:03
的高空作业危险,而且其操作简单、使用方便,应用价值高,市场前景广阔。 1 玻窗清洁机器人系统总体结构 该玻窗清洁机器人系统由手势识别和清洁机身两个部分组成,如图1所示。手势识别部分利用MXC6202
2012-12-20 10:29:35
机器人驱动装置是什么?机器人驱动装置系统是由哪些部分组成的?
2021-07-05 07:05:10
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
清洁机器人是服务机器人的一种,所谓服务机器人是指自主或半自主的、从事非生产活动、能完成有益于人类健康的服务工作的机器人。家庭清洁机器人集机械、电子、传感器、计算机、控制、机器入技术、人工智能等诸多
2019-09-05 06:56:37
机械手之间有防护墙隔开,操作者可通过观察窗或闭路电视对从机械手操作机进行有效的监视,主从机械手系统的出现为机器人的产生为近代机器人的设计与制造作了铺垫。1954年美国戴沃尔最早提出了工业机器人的概念,并
2015-01-19 10:58:38
而已 这个很开源有必要买来学习吗?还有树莓派等。。。对我做机器人有帮助吗?或者说以后发展需求还有一点 听说很多机器人竞赛都用乐高机器人套装(嘻嘻这个是不是小儿科呢?还是另有缘由?) 现在很多东西
2016-01-19 13:44:49
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-07-05 07:08:47
工业机器人的四大特征是哪些?工业机器人是由哪些部分组成的?工业机器人是怎样进行划分的?
2021-10-11 09:10:17
领域中。 二、专业建设及人才需求前景机器人制造厂商:需求机器人组装、销售、售后支持的技术和营销人才。机器人系统集成商:需求机器人工作站的开发、安装调试、技术支持等专业人才;机器人的应用企业:需求机器人
2015-09-02 14:03:18
感知外部环境信息和自身状态,获得反馈信息,实现系统的闭环控制。目前在仿人机器人中应用的传感器种类繁多,例如视觉传感器、电子罗盘、加速度计和超声波传感器等都是仿人机器人中常用的传感器。DF-1机器人
2019-06-21 07:04:37
研究的前沿,它在一定程度上代表了一个国家的高科技发展水平。运动控制系统是机器人控制技术的核心,也是机器人研究领域的关键技术之一,在机器人控制中具有举足轻重的地位,因此,各研究机构都把对机器人运动控制系统的研究作为首要任务。
2020-08-19 06:57:09
了一种轮式移动机器人的设计方案。该机器人系统应用超声传感器、光敏传感器、碰撞传感器采集外部环境信息,采用PTR2000实现移动机器人与计算机通信,从而实现现场信息的反馈和计算机控制命令的发送。
2020-05-11 06:39:04
基于TRIZ轮式机器人驱动轮的研究 根据亚太机器人大赛规则,要求机器人车轮与地面有较大的摩擦力,以保证机器人在规定的时间内完成比赛任务。文中以TRIZ为理论基础,应用CREAX Innovation
2021-09-13 07:12:21
制造出像人一样具有智能的能替代人类劳动的机器人,一直是人类的梦想,人类获取的信息80%以上是通过视觉。因此,在智能机器人的研究中,具有视觉的机器人的研究也就成了第一位的。对机器人视觉伺服系统的研究是机器人领域中的重要内容之一,其研究成果可应用在机器人自动避障、轨迹跟踪和运动目标跟踪等问题中。
2019-09-27 08:07:35
`如何系统性地学习工业机器人技术?对于一个还没入门的想学机器人的小白而言,想快速见到成效的的话,找一所对自己胃口的机器人培训机构是很关键的,当然自己本身的决心和毅力离也很重要。工业机器人系统组成详解
2016-03-06 12:56:19
树莓派和其他机器人的控制器有何不同?如何使用树莓派开发智能机器人控制系统?
2021-12-23 06:55:02
各位大神,现在小弟想用LabVIEW控制安川机器人,可是通过调用motocom32的DLL不能和机器人通信,听说LabVIEW不能二次开发安川机器人,请问有熟悉安川机器人的高手指点一二,不胜感激!
2014-11-10 12:29:06
应用对象相结合后的系统,其是硬件和软件紧密捆绑在一起的系统。将嵌入式系统应用于灭火机器人的设计中,对机器人的性能智能化、网络化、小型化都有了明显提高。比赛用灭火机器人需要机器人有智能较高的自动控制
2019-07-31 06:23:18
今天,机器人正被应用于那些先前不曾使用机器人的生产领域。针对不同的情况,必须始终分别考虑各个安全方面并针对每种应用实施合适的安全解决方案。安全的传感器技术举足轻重:为了满足所有安全相关的应用,需要采用满足传感器需要的模块化方法。
2020-05-07 08:16:08
本帖最后由 我爱方案网 于 2022-11-4 15:36 编辑
YOGO ROBOT在近期正式宣布了完成数亿元C1轮融资的消息。在今年3月份,大钲资本便以战略投资高仙机器人的方式,出手商用
2022-11-04 15:34:10
如题。在论坛有看到家用机器人的2014年度十大款类型。比较感兴趣,不知道有没有大神了解比较全面的家用机器人知识?
2015-02-11 11:16:00
嵌入式系统在机器人系统中的作用几十年前,机器人的应用主要限于工业和研究环境,甚至限于科幻小说领域。如今,机器人技术已渗透到几乎每个领域。它们是日常生活的一部分,通常人类没有意识到它们的影响。随着技术
2021-11-09 07:46:00
随着人口老龄化进程的加快,更多老年人,尤其是地震和疾病致残的残疾人,都需要照顾。基于此,这里提出一种基于ARM的嵌入式服务机器人控制系统设计。该服务机器人的控制系统是机器人的神经中枢,因而其设计是机器人研究的核心。该控制系统通常以MCU、 DSP等为核心,采用上、下位机二级分布式结构。
2019-10-15 08:03:16
工业机器人的定义是什么?有哪些特点?工业机器人有哪几个子系统组成?各自的作用是什么?工业机器人的主要技术参数有哪些?
2021-07-05 07:20:36
最近在看工业机器人的资料,想知道现在的一些市面上的工业机器人上用的控制控制系统都有哪些厂商呀?
2015-01-23 12:04:01
,从而最大限度地提高运输过程中的负载稳定性。码垛有三种主要类型:内联或层成型,卸垛或卸载,混合箱体。切割:由于其危险性,激光,等离子和水射流切割机经常与机器人一起使用。数百个不同的切割路径可以编程到
2017-09-07 17:20:32
工业机器人控制器功能多任务功能一台机器人可进行多个任务的操作;
2019-09-12 09:10:22
机器人对于医疗保健行业并不陌生。我们知道,已经有大量的机器人被用于各种物理治疗中,还有一些机器人被用于帮助训练医生进行一系列治疗和手术。下面这10个机器人是当前最实用的医用机器人,它们有潜力为医疗
2015-03-02 15:05:49
机器人听觉系统主要是对人的声音进行语音识别并做出判断,然后输出相应的动作指令控制头部和手臂的动作,传统的机器人听觉系统一般是以PC机为平台对机器人进行控制,其特点是用一台计算机作为机器人的信息处理
2019-08-21 07:51:24
机器人听觉系统主要是对人的声音进行语音识别并做出判断,然后输出相应的动作指令控制头部和手臂的动作,传统的机器人听觉系统一般是以PC机为平台对机器人进行控制,其特点是用一台计算机作为机器人的信息处理
2019-08-30 08:23:42
200-230平米的房子。扫地机器人工作时噪音为47分贝,噪音极小,可舒适睡眠。一次充电最大清洁面积高达300平米,充电只需要3-5小时即可,具有自动回充功能。扫地机器人真正做到不弯腰、省时省力、方便快捷
2015-05-18 17:08:21
关于ros智能机器人,就是一个写智能机器人代码的一个虚拟机,
2021-10-13 19:20:16
一种新型的工业机器人已经走到行业的前沿, 他们的主要特点是能够安全地协助人类工作。在网上有很多人谈论它们,但你认真了解过它吗?在2008年,很多人爱它们只是处于好奇心。在2012年,机器人被视为时尚
2020-08-17 06:00:49
自动蔽障,自动清扫的功能。清洁机器人是实现智能清扫的主题部分,我们将要做到的是:完成机械结构的设计与制作、硬件电路的设计及实现、底层软件的编写以及系统调试、智能手机蓝牙通讯技术的研究及实现、清洁机器人
2013-11-08 22:30:10
吸尘机器人作为服务机器人领域的一个新产品,结合了机器人和吸尘器技术,能在无人看守情况下轻松地完成室内环境的吸尘等清洁工作,越来越受到人们的欢迎。
2020-03-18 06:18:37
组成部分,在生活中的作用越来越重要。基于STM32的机器人保姆系统的设计方案,该方案模拟智能家居环境,简化了定位方式,有效地利用了ZigBee技术低成本、低功耗的特点[3],设计出一个合适大小的轮式机器人
2020-09-04 16:10:50
。大致上分为两种:1.中央集尘盒2.置于后端集尘盒。遥控器:控制机器人吸尘器用,也可由机身上控制。分类清洁系统分类第一种:单吸口式单吸入式的清洁方式对地面的浮灰有用,但对桌子下面久积的灰及静电吸附的灰尘
2018-10-12 10:11:44
。2. 方案功能(1)手机远程控制。用户可以通过手机微信对扫地机器人进行远程操控。(2)智能语音系统。可以通过语音控制扫地机器人。(3)智能指令控制系统。用户可以通过手机微信向扫地机器人发送控制指令,如
2017-05-27 13:31:20
智能监控机器人是近年来机器人应用工程中一项前沿性的题目,智能化探测小车是智能行走机器人的一种。智能监控机器小车就是针对上述情况,在参考了目前大多数智能机器人的基础上,以降低成本为原则设计的。小车具备
2019-10-14 07:37:52
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-06-30 06:37:34
随着计算机科学和自动控制技术的发展,越来越多的不同种类的智能机器人出现在工厂、生活当中,机器人视觉系统作为智能机器人系统中一个重要的子系统,也越来越受到人们的重视。它涉及了图像处理、模式识别和视觉
2020-04-07 07:27:24
未来家庭的监控机器人应该要具备以下特征:1.拟人化设计,具有可爱的操作接口让人很容易从远 端监控.2.监控机器人可以储存所看到的影像,并通过远程传给家庭主人.3.监控机器人本身要有基本的感知
2019-10-30 02:25:39
`机器人搭载在四旋翼飞行器上抓握动作完全符合惯性定律有木有`
2016-09-28 14:44:39
第七届工训赛水中机器人电控方案设计
2021-11-12 07:00:21
接力机器人机械部分采用遥控汽车,造型时尚,色彩华丽,车上装配的火炬有“2008奥运”标志,内部七彩电子火焰舞动闪烁,令人赏心悦目。比赛开始,人工启动第一辆机器人小车,车上火炬同时点亮,当遇到下一
2021-07-13 09:31:59
上看过很多预测,关于这个球的预测大家也是众说纷纭。那么现在就根据预测的最多的一种情况--球形机器人,来进行简单的设计方案分析。准备材料 三个直流电机,一个舵机,飞轮一片,空心透明亚克力球(直径在20~30cm),TB6612电机驱动模块两片,STM32F1最小系统板一块,杜邦线若...
2021-09-01 06:33:20
`中国快递小哥快没饭吃了!!有木有!!美国Starship Technologies公司正准备明年在伦敦和美国部分地区对机器人送货进行测试。研发者称,机器人具有体型小、安全和无污染等优点。它们可搬运
2015-12-31 11:32:10
自主飞行空中机器人设计方案
2013-09-26 13:29:52
萌新求助,求ABB机器人驱动模块温度警告及保养方案
2021-11-12 07:05:25
什么是移动机器人软硬件系统问题?移动机器人软硬件系统有哪些问题呢?
2021-11-11 06:07:42
请问机器人用的是Linux系统还是单片机呀?单片机里是什么系统啊?我想写机器人的程序。
2011-04-07 14:12:52
请问工业机器人有什么优劣势?
2021-06-18 06:04:14
怎么设计一种室外移动机器人组合导航定位系统?如何实现室外移动机器人组合导航定位系统的硬件设计?如何实现室外移动机器人组合导航定位系统的软件设计?
2021-04-19 10:50:33
我是新人,求帮助啊,明天需要提交轮式机器人应用的报告,求大神给点建议,可用轮式机器人应用于那些方面,要求实际可行,应用于生活,农业,军事都可以,谢谢啦
2013-04-17 16:32:16
智能音箱痛点的迷你语音助手小机器人
2021-01-14 07:39:15
江智党建机器人是经过多年的市场沉淀 ;现已可以提供系统 全方位的党建机器人服务
2022-06-21 07:59:59
清洁机器人是服务机器人的一种,可以代替人进行清扫房间、车间、墙壁等。提出一种应用于室内的移动清洁机器人的设计方案。其具有实用价值。室内清洁机器人的主要任务是能够代替人进行清扫工作,因此需要有一定的智能。
2020-03-14 16:51:00 3013
3013 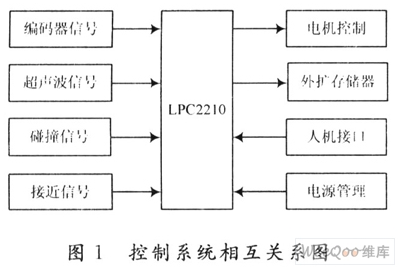
在光伏发电系统中,光伏组件表面积聚灰尘、异物,会很大程度上影响光电转换效率。为此,设计了一种光伏组件智能清洁机器人,包括对其硬件系统和清洁方案的设计,能够实现对光伏组件的自动清扫。同时,针对智能清洁
2023-08-08 14:27:251653 
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论