,代替人手进行抓取、转移工件或料理东西的机电一体化自动装置。仿生机械手一般用什么电机?超声电机作为一种新型的微电机,不像传统的电机那样,利用电磁的交叉力来获得其运动和力矩。超声电机则是利用压电陶瓷
2021-07-13 13:59:58
本帖最后由 narushin 于 2019-9-9 09:34 编辑
研究生刚入学,跟着一个师兄在做多电机智能控制,他让我写多电机的数学模型。建立多电机系统的目的是实现多电机的同步智能控制,当
2019-09-09 08:48:49
大家都使用什么型号的can控制器独立can控制器除了nxp和microchip两家,还有谁生产吗?与2440配合使用有没有什么较好的方案
2013-06-21 10:52:44
俺一牛X同学的一个系统未来需要几千轴的电机控制,这段时间一直在调研现在的电机控制方案,大致有了些眉目,说出来供看到这篇文的专家们提提意见,希望能更完美的实现。步进电机和伺服电机的控制,基本涉及到3
2021-09-03 08:10:08
最近在公司调试电机的时候,当电机从一个很高的速度急减速时会在母线电压上产生一个很高的电压波动。母线电压正常12V,急减速时候最高会达到45V左右。电机是永磁同步机,FOC控制。怎么能有效的使这个电压波动减低呢?当母线电压过高会给其他电路带来问题
2019-03-04 17:57:59
本资料是基于单片机AT89S52的直流电机PWM调速控制系统的设计方案。 本设计任务: 任务: 单片机为控制核心的直流电机PWM调速控制系统 设计的主要内容以及技术参数:功能主要包括:1
2012-07-26 22:29:28
实验名称:ATA-4051功率放大器在仿生水下声接收器设计中的应用
实验目的:通过实验验证仿生水下声接收器的接收灵敏度与接收指向性
实验内容:搭建了水下声学测量系统进行实验,探究仿生水下
2024-02-28 15:58:48
本公司寻求KVM切换器设计方案,有意者发邮件到2851282853@qq.com
2016-03-24 12:57:21
某司二条姐妹船采用SSP5 型 360º全回转电力推进器,左右两台中压永磁电机推进船舶行驶,另外两面分别由两台 P14S 金杯油泵驱动三台CA210 型赫格隆内曲线液压油马达 360º控制船舶回转
2021-07-06 06:35:51
基于FPGA的步进电机细分驱动控制设计一、基本要求:在理解步进电机的工作原理以及细分原理的基础上,利用FPGA实现四相步进电机的8细分驱动控制。二、评分标准:1、设计方案介绍 (共15分)要求:详细
2013-06-14 22:03:43
离子推进器是未来太空飞行器一种极具前景的推进设备,但它的工作寿命受限于上面携带的推进剂剂量,一旦推进剂消耗完毕,任务就宣告结束…… 不再只是纸上谈兵的理论!欧洲太空总署(ESA)团队现在开发
2018-03-23 15:05:06
项目名称:水面清理机器人试用计划:水面清理机器人的推进器已经选择好了,就是2个直流电机,现在缺少比较好的电机驱动部分。想尝试一下用NXP的方案。之前带学生参加恩智浦智能车比赛的时候也是用的NXP芯片。
2020-06-30 16:09:56
结果中,导致试验结果往往与预期的有可观的偏差。 ②新型直线电机推力波动测试解决方案新型波动测试解决方案是同一导轨上采用两个同型号直线电机互为负载,通过对合适条件下所采集的推力信号进行数据处理,最终得到
2017-07-10 10:09:40
本文提出了基于51单片机两路温度控制器的设计方案,该设计方案采用两个DS18B20温度传感器,采集两个不同地方的温度,通过AT89C51处理进行,由四位LED数码管显示所测量温度,前两位为第一个
2019-07-03 07:17:21
在数控行业,经常会用到运动控制器,下面介绍一种基于MCX514的四轴运动控制器设计方案,为其它技术开发人员提供一些参考,方案整体的架构如下图所示:四轴运动控器通过网络通信,可同时控制四个运动轴,运动
2017-09-22 16:24:58
本文介绍了一种集成的智能锁电机驱动器设计方案,具有动态过流检测功能,可以适应供电电压和负载的变化。
2021-02-22 06:12:51
能够为基于工业的客户提供完整的集成式解决方案,并在实现规格要求的同时帮助他们满足最新、最苛刻的能源法规。今天就为各位介绍一款电机控制系统解决方案——伺服控制。欲下载该解决方案完整资源包请点击链接
2018-10-25 10:19:00
八路彩灯控制器的设计方案本设计采用谦价的数字集成电路定时器、计数器和译码器,产生循环控制信号,控制可控硅驱动的电路,从而控制彩灯循环闪动,本电路简单、易调试。
2009-12-17 10:39:38
转速的应用。电机电压支持为 8V 到 32V,且最大电流为 2.5A。PWM 方案可实现速度控制和电流调节。电流衰减期间的 H 桥 FET 支持、电流衰减的时间间隔以及电流抗尖峰脉冲时间。电机驱动平台整合了针对
2018-12-12 11:51:24
转速的应用。电机电压支持为 8V 到 32V,且最大电流为 2.5A。PWM 方案可实现速度控制和电流调节。电流衰减期间的 H 桥 FET 支持、电流衰减的时间间隔以及电流抗尖峰脉冲时间。电机驱动平台整合了
2015-04-29 16:44:59
手是模仿人类自然手的机械假手。它可以做人手可以做的事情。这只手是用塑料作为原材料进行 3D 打印的。对于 PCB,将边框直接放置在具有精确尺寸的仿生手上,它有一个 arduino nano 作为控制器
2022-07-04 08:01:01
因为专注才更专业,快快关注吧!正文开始一、前言某司二条姐妹船采用SSP5型360º全回转电力推进器,左右两台中压永磁电机推进船舶行驶,另外两面分别由两台P14S金杯油泵驱动三台CA210型赫格隆内
2021-07-06 06:27:04
了非常广泛的应用。本文为大家介绍几种变频器的设计方案,包含完整软硬件方案。基于Simulink的数字下变频器设计及其FPGA实现
2019-08-28 07:42:25
想请问一下,在国内外如此多的变频器厂商中,变频器在控制电机有速度传感器矢量运行时,在电机额定频率输出下,分为空载和满载运行,编码器反馈的频率一般波动在多少?
在多少HZ以下的波动认为是比较好的,在
2024-02-01 16:58:54
采集和处理,该流程图如图4所示,然后经数字PI调节器运算后产生PWM脉冲输出,经驱动电路隔离放大后驱动MOSFET,实现整个逆变电源系统的闭环控制。 逆变器采用全数字控制,所有参数均能通过显示面板
2018-11-29 11:13:17
基于CH365和MCX314As运动控制器实现运动控制卡的设计方案
2021-01-07 07:28:55
此提供了新的解决方案。IP核(IP Core)是具有特定电路功能的硬件描述语言程序,可较方便地进行修改和定制,以提高设计效率[3]。本文研究了基于FPGA的数据采集控制器IP 核的设计方案和实现方法,该IP核既可以应用在独立IC芯片上,还可作为合成系统的子模块直接调用,实现IP核的复用。
2019-07-09 07:23:09
一种STM32微控制器电机控制方案设计与实现嵌入式设计:以STM32为控制核心的数码相框设计方案基于STM32的多路电压测量设计方案图文解说:如何将STM32的标准库编译成lib库基于STM32
2014-03-25 15:21:54
基于STM32的便携体检装置的设计与实现基于STM32的电能质量检测技术研究基于STM32的EMS液晶显示触摸屏设计方案STM32的曼彻斯特编译码系统设计STM32微控制器中采用DMA实现方波的产生和捕获
2018-09-05 16:41:46
一种STM32微控制器电机控制方案设计与实现嵌入式设计:以STM32为控制核心的数码相框设计方案基于STM32的多路电压测量设计方案图文解说:如何将STM32的标准库编译成lib库基于STM32单片机和EM310的无线终端设计方案资料未完待续,每天都会整理更新,希望大家多来论坛查找资料
2018-09-04 16:56:13
基于语音控制的智能家居设计方案分享
2022-01-19 07:25:19
在现代机器人设计中,头部、颈部、四肢的任何活动都需要各种各样电机的支持,如传统的旋转电机、步进电机、直线电机和其它特殊电机,但这些电机的驱动和控制要求各有不同,如何实现各种电机的精确控制解决方案?如何以...
2021-09-17 06:16:24
如何去实现两个步进电机独立控制互不干扰呢?怎样用数码管去显示步进电机的状态呢?
2021-10-15 08:26:52
研究目标设计一款基于STM32的仿生机械手:(1)基于STM32的仿生机械手实现无线控制和有线控制。 (2)实现串口指令控制仿生机械手动作。(3)实现仿生机械手具有多种工作模式。(4)实现数据手套
2022-01-07 06:55:18
电机是许多电器的主要组成部分之一,而控制电机运转的电机驱动器则是电机的灵魂所在。本文将为您介绍由安森美半导体新推出电机驱动器模组方案,并了解其如何搭配Arduino MICRO一起运作,来简化电机驱动设计方案。
2019-07-18 08:45:44
安全运行,对电机控制系统的性能要求很高,对电机的效率也有较大的要求。同时作为一种实用型的交通工具,要求电机控制系统能承受震动、耐受恶劣环境、可靠性高。常规的滑板车控制系统硬件设计方案如下图所示,主要包括
2021-11-10 07:24:31
本文介绍在分级Ad Hoc网络中多协议路由器的地位及功能,在此基础上提出一种多协议路由器设计方案。结合设计方案,介绍实现方案中所采用的Motorola公司的ColdFire嵌入式处理器MCF5272、uClinux操作系统,以及在该平台上运行的路由协议A0DV。
2021-06-07 06:12:10
控制对电机进行了测试,高达 1.2kHz 电气频率(12kRPM,6 极对电机)。我们的无人机 ESC 高速无传感器 FOC 参考设计拥有一流的 FOC 算法实施,可实现更长的飞行时间、更佳的动态性能
2019-10-22 16:29:56
(EMF) 幅度测量(限无传感器电机)。目前有三种电子换向控制方案:梯形、正弦和磁场定向控制 (FOC)。 FOC 实现成本高,专用于高端应用,因此本文不做讨论。对于许多应用,梯形控制的 BLDC 电机
2019-10-29 07:00:00
希望温度控制器设计方案中所设计的温度控制器,方案功能达到通过循环扫描实现了两路温度的采集与显示。 而且要尽量缩减成本,减少功耗,温度测量的准确性和多路温度的同时显示;当然实用性还是要保障的
2021-03-05 07:23:56
本文提出的DSP控制多片DDC芯片的接口设计方案,对于4路A/D转换后的高速信号,分别通过DDC进行下变频和多级抽取滤波。
2021-04-20 06:20:27
一种基于FPGA技术的多按键状态识别系统的设计方案
2021-05-06 08:44:59
求一种多通道同步数据采集及压缩系统的设计方案。
2021-04-28 06:13:04
求一种基于FPGA的HDLC协议控制器设计方案
2021-04-30 06:53:06
求一种基于FPGA的永磁同步电机控制器的设计方案。
2021-05-08 07:02:07
求大佬分享一种多光谱可见光遥感图像压缩系统的设计方案
2021-06-02 06:39:48
瑞士联邦理工学院 Pascal Buholzer 和他的学生设计的Sepios水下仿生机器人,解决螺旋桨推进器的水草缠绕和噪音问题。
2015-01-13 15:52:06
一、设计方案比较与分析:1、电机调速控制模块:方案一:采用电阻网络或数字电位器调整电动机的分压,从而达到调速的目的。但是电阻网络只能实现有级调速,而数字电阻的元器件价格比较昂贵。更主要的问题在于一般
2021-12-07 13:18:34
MOSFET驱动保护电路设计方案常用的功率元器件大全,防爆变频机的设计你能从这本书中学到什么这本书介绍了电机控制的设计与相关功率器件的选择等重要内容。其中包括:电动机控制器的模块和工作原理三大电机控制
2019-03-27 16:56:11
电磁推进仿真系统是以仿真电磁推进系统的工作特性和特点,对电磁推进的供电系统、连接系统和控制系统进行相应的输出性能测试。适用行业:电机系统(电动汽车、高铁、地铁、船舶),电磁推进(电磁炮、卫星推进器
2018-12-27 14:59:48
文章目录摘要引言1. 硬件设计2. 控制算法3. 软件设计及Proteus仿真摘要本文介绍了直流电机PWM恒转速闭环调节系统的一种设计方案。系统以单片机AT89C51为控制核心,由液晶显示模块、按键控制
2021-09-07 09:31:34
最近在搞一个水下推进器,这东西的控制其实跟四旋翼的螺旋桨控制差不多。但我也是第一次用STM32板子来控制电调驱动桨叶旋转,因此踩了很多坑。网上找了很多资料,但是很多都写的不是很清楚,这边稍微记录一下
2022-02-16 06:19:28
选型推进器的时候一般要注意哪些事项?
2021-09-23 07:55:45
您知道我们手指和拇指的运动需要超过25块肌肉共同工作吗?这对于诸如3D打印机器手等仿生手可能并不相同,但其功能可能是一样的。凭借我们的电机驱动器方案套件应用在机器手中,我们能够模拟人类手部的动作
2018-10-29 08:54:49
的一拖多电机控制解决方案N32G455系列芯片为已发布的通用增强型处理器,支持FPU及DSP高速的处理能力、集成4个独立的12bitADC、内置4个独立的运算放大器和7个高速模拟比较器,适用于单芯片
2020-03-17 10:30:42
UG设计应用案例-推进器的设计装配
上图是推进器模型图。
2009-02-06 11:48:00 50
50 本文以水下滑翔机器人为研究对象,首先简要介绍了水下滑翔机器人的总体结构,然后重点研究了其控制系统的设计方案,阐述了控制系统软、硬件的设计与实现,通过水下滑翔机
2009-06-20 10:17:0011 提出了一种基于PLC的四相步进电机控制的方法,介绍了控制系统的设计方案及其软硬件的实现方法。实现对四相步进电机的转速控制、正反转控制、以及步数控制。提出设计总体方
2009-08-11 11:14:5089 电机控制设计方案手册 Motor Control Design Solutions
Microchip Technology offers a broad product portfolio
2010-04-26 16:26:1833 本文以水下滑翔机器人为研究对象,首先简要介绍了水下滑翔机器人的总体结构,然后重点研究了其控制系统的设计方案,阐述了控制系统软、硬件的设计与实现,通过水下滑翔机
2010-07-20 17:19:3424 提出了一种基于PLC的四相步进电机控制的方法,介绍了控制系统的设计方案及其软硬件的实现方法。实现对四相步进电机的转速控制、正反转控制、以及步数控制。提出设计总体方案
2010-07-21 09:31:1761 ARM LPC2101的无刷直流电机控制设计方案
阐述使用低成本的ARM7 LPC2101微处理器设计无刷直流电机的控制方案;详细地介绍微处理器、MOSFET驱动和MOSFET的
2009-03-29 15:13:00 1544
1544 
利用DSP实现的无差拍控制逆变器设计方案
美国著名控制理论专家卡尔曼于60年代初提出了数字控制的无差拍控制思想。随着电力电子技术的发展,80
2010-03-04 17:49:311884 
基于Infineon的起动/停止交流发电机控制设计方案
英飞凌提供各种产品,从微控制器、传感器和收发器到智能功率驱动器。通过整合技术和系统专业
2010-04-10 11:37:33604 
本文以仿生机器蟹为设计对象,提出了基于DSP的机器蟹多层多目标递阶控制系统方案,并对单步行足的软、硬件设计做了详细的阐述,为进一步实现自主式的仿生步行机构奠定了基
2011-08-09 11:26:27663 
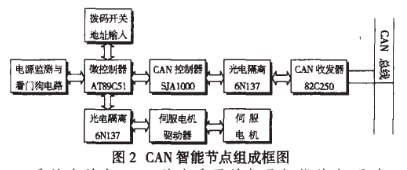
提出了一种基于CAN总线的分布式水下航行器控制器的设计方法,主要描述了其硬件总体设计方案和实现办法。控制器作为分布式控制系统的一个节点,与其他节点之间以CAN总线连接并形
2013-06-08 17:54:5531 喜欢游泳或水上运动朋友,你们的福利来了。炎炎夏日,这款名为“Bixpy Jet”手持水下推进器不仅能够帮助你秀出强健的体魄,还能够让你以一种更为放松的状态享受游泳或各种水上运动。
2016-09-18 10:23:292168 一种小型直流电机控制系统硬件设计方案_林家泉
2017-01-16 14:04:300 依靠NI myRIO控制的4块鳍,敏捷的水下机器人Sepios能够向6个方向移动 这个方案将向您演示一个采用NI MyRIO控制的4鳍水下机器人方案,这个由学生制造的Sepios水下机器人依靠
2017-02-08 20:24:38475 7月12日消息 BIKI是世界上第一个仿生水下无人机,也是唯一一款具有自动平衡,避障和回归的水下机器人。通过支持4K摄像头,BIKI向您呈现水下的最佳视野。
2017-07-12 15:45:232311 机器人的实现成为可能,于 是出现了一种鱼形机器人,也称为仿生机器鱼[1-2]。 仿生机器鱼是参考鱼类游动的推进机理,利用机械、电子和智能材料实现水下推进的一种运动装置。 仿生机器鱼的研究始于 19 世纪前期,Breder 和 Gray 等
2017-10-19 16:02:111 ) 为基础, 对其航行控制和定位控制方法进行了较详细的分析。 同时介绍了它的推进器布置、控制系统结构、推力分配等方法。最后展示了它的运行实验结果。 近年来国外水下机器人技术发展迅速,技术水平较高。其中,具有代表性的
2017-11-12 09:43:1710 为了实现对水下机器人周围环境的监测,提出了一种基于PC104与C8051F120的水下机器人环境监测系统设计方案,并完成系统的软硬件设计。
2018-03-21 09:23:002012 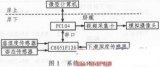
针对水下机器人进行水下检测时的实时控制和监控问题,对水下机器人的推进器结构、运动方式、通讯方式、机体状态显示方式、运动控制方法等方面进行了研究,对水下机器人实现高效水下检测所需的各功能需求进行了归纳
2018-03-14 15:36:246 搭载3000流明的高亮度LED灯使得无人机泰坦在深海、浑浊的湖底都能轻松应对,装配6个强劲的推进器(4个水平,2个垂直),下潜深度达到150米,智能跟踪目标,在水下实现360°自由移动拍摄,再配合 VR 眼镜,使用者可以通过手柄操控泰坦的操控,通过第一视角,体验沉浸式海底观察体验。
2018-07-14 10:56:394249 据外媒New Atlas报道,中国智能水下无人机生产商吉影(Geneinno)宣布,其Titan水下无人机将配备动力机械臂。Titan水下无人机去年在Kickstarer成功众筹。配备六个推进器的Titan最大下潜深度为150米,支持4K/30Fps视频拍摄。
2019-01-26 11:58:001963 、特种作战等军事领域的水下推进装置。 水下推进器最核心的部件就是其动力系统水下特种推进电机,该电机是技术含量很高的一种电力推进装置,其技术含量包括了流体设计,电机设计和材料选择。水下推进器电机的结构新颖独特,
2020-06-06 11:25:273342 据外媒报道,NASA正在为未来的月球着陆器测试着一些新一代推进器,并且它们正在发光。今年3月,NASA和推进器开发公司Frontier Aerospace在真空舱内对两个推进器原型进行了60次高温测试。
2020-03-26 15:33:101549 此控制板本来控制遥控船桨角度用的 ,里面的功能可以实现直流有刷电机正反转,PID恒速,还有转舵角度控制,带电流保护功能。 责任编辑:xj 原文标题:直流有刷电机角度和速度控制方案设计方案(原理图+源码) 文章出处:【微信公众号:电路设计技能】欢迎添加关注!文章转载请注明出处。
2020-12-07 11:25:583427 美国能源部普林斯顿等离子体物理实验室一位名叫法蒂玛-易卜拉希米的研究人员开发出一种新型推进器,可以帮助人类在未来探索太空。这种新型推进器利用磁场使等离子体粒子从火箭背面射出,推动航天器前进。等离子体是物质的第四态,是一种带电的气体。
2021-02-02 15:04:043107 六足仿生巡检机器人的设计方案
2021-06-23 17:13:4143 变电站开关电机电源远程控制的设计方案
2021-06-28 15:55:597 水下航行器通用的数据处理软件设计方案
2021-06-30 15:29:055 ADIDAuM隔离DCDC控制器参考设计方案(ups电源技术方案)-ADIDAuM隔离DCDC控制器参考设计方案
2021-09-17 17:10:3227 这个“长着三个触角”的水下机器人看上去是不是很萌?它使用的是一种新型的由三个球形磁耦合矢量推进器组成的推进系统。与传统的水下机器人使用多个固定推进器来实现多自由度(DOF)推进相比,矢量推进器具有多自由度、寄生推力小,以及效率高等优势。
2023-08-24 11:21:41909 
用于燃烧室仅1毫米的微型卫星推进器的火箭发动机需通过MEMS工艺制造而成。该类卫星只使用冰和电就能产生所需推力。 随着电子器件的不断小型化,轨道发射能力的不断提高,小型卫星正在迅猛发展。然而,在小型
2023-10-10 09:14:53601 从水下偏振光场、生物的地磁导航机理以及生物的光磁复合导航机理入手,介绍了水下仿生偏振光导航、仿生地磁导航以及仿生光磁复合导航的基本原理和研究现状;通过分析现有仿生导航方法的优势与限制,主要从提升复杂环境适应性的层面阐述了目前需要解决的关键问题
2023-12-25 14:26:48266 
实验名称:ATA-4051功率放大器在仿生水下声接收器设计中的应用 实验目的:通过实验验证仿生水下声接收器的接收灵敏度与接收指向性 实验内容:搭建了水下声学测量系统进行实验,探究仿生水下声接收器
2024-03-05 15:40:57105 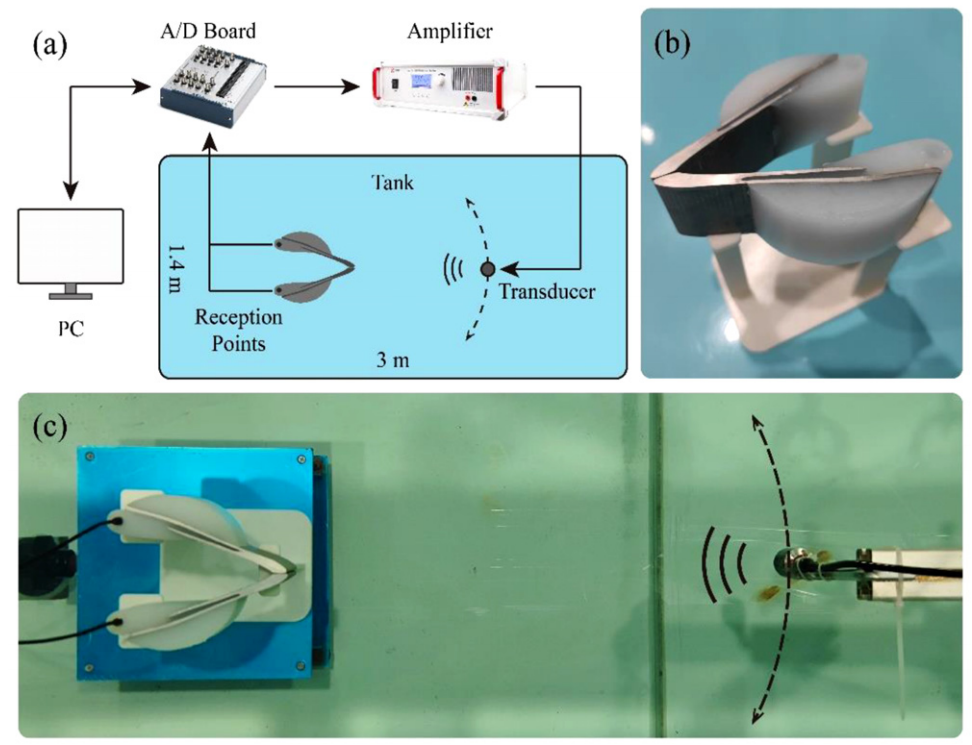
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论