`刚开始做机器人,实物图`
2013-11-25 11:36:20
第三章、双足机器人的硬件结构与框图一、双足机器人的硬件框图图1. 双足机器人结构框图
2013-11-25 11:30:18
描述平衡机器人护盾
2022-09-05 06:11:44
有没有机器人比较全的资料
2017-03-21 12:35:21
请各位大神指导,移动式机器人是怎么做EMC保护的,机器人是锂电池供电,所以就不能接大地了,那么对机器人的干扰是通过何种方式来释放或转移的?
2016-07-26 13:33:14
PID控制的优点有哪些?机器人控制技术有哪些重要性?
2021-06-18 08:02:56
PIC机器人初学指南:用PIC微控制器搭建机器人双足步行机器人制作指南双足步行机器人进化技术双足步行机器人仿真设计机器人制作轻松入门机器人技术创意设计玩机器人 学单片机Arduino 机器人权威指南学
2015-02-22 07:34:56
机器人的运动原理还是属于最基本的简单机械。机器人运动主要是依靠什么装置?有些什么装置是机器人用的比较多的?
2015-02-03 11:22:01
想弄一个vi可以动态显示机器人的姿态,但不知道有什么函数可以引入机器人的模型,帮帮忙,谢谢。
2012-02-11 17:25:22
机器人想法创意,不错过精彩内容素材来源:电路城机器人迅速发展,随之涌现出了一大堆创意机器人设计,魔方机器人,寻迹机器人,六足虫虫机器人……电路城给你十个创意机器人陪你玩耍,一起去看看吧...
2021-07-21 07:31:24
机器人有哪些类型?
2021-06-18 06:41:57
机器人的优缺点有哪些?机器人是由哪些部分组成的?
2021-10-11 07:51:29
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
、KUKA、Yaskawa Motoman、FANUC2.2.1 本体结构本体结构分类:不同机器人建模控制的本质区别关节型机械臂:串联垂直多关节6轴机器人SCARA机械臂:笛卡尔机械臂:Delta并联机械臂:双平行四边形机械臂(码垛机器人)其他类型机械臂:圆柱形、球坐标符号表示机器
2021-09-08 07:44:15
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
目前产业机器人仅能在严格定义的结构化环境中执行预定指令动作,缺乏对环境的感知与应变能力,这极大地限制了机器人的应用。利用机器人的视觉控制,不需要预先对产业机器人的运动轨迹进行示教或离线编程,可节约
2015-01-23 15:02:27
波士顿动力创始人Marc Raibert 1986年的书,足式(腿式)机器人开山之作,研究集中在平衡和动态控制的核心问题上
2017-12-11 10:22:52
ABB机器人伺服电机维修常见故障是什么?
2021-09-29 06:48:18
ABB焊接机器人伺服电机维修常见故障有哪些?
2021-09-30 07:02:58
去年 1 月份,瑞士公司 ANYbotics 放出来一款灵活的四足机器人——ANYmal,它可以对抗各种恶劣的现实环境,适用于在危险的工业场景中执行任务。在最近的世界机器人大会上,ANYbotics
2021-12-31 06:28:53
本帖最后由 colorsky 于 2016-4-21 14:05 编辑
大家好,我是ColorSky。这是我的双足机器人的开源项目。先发出视频给大家看看,后面陆续会把技术资料上传。机器人鞠躬动作机器人舞蹈1视频机器人跳机器舞视频
2016-04-21 10:51:28
`在本项目中,我将从头开始打造一个能够使用蓝牙进行控制的四足乌龟机器人。该机器人拥有两个自由度,采用的是爬行的方式进行运动,所以在不平坦的地面可能不能正常工作。第一步:3D打印组件本机器人的部分
2015-12-11 17:26:04
描述“迈尔斯”开源四足蜘蛛机器人它使用 8 个 SG90 / MG90 伺服电机 作为腿部的执行器,由一个定制的 PCB 组成,用于为伺服系统供电和控制,而 Arduino Nano.PCB 具有
2022-08-09 06:30:29
求大神指导怎么做多足机器人的行走的动画演示!!!
2017-04-23 11:36:56
自动或半自动机器人常常需要嵌入式控制系统,从而能够结合高度智能化的确定性控制,并且可以方便地连接到不同的传感器和执行器上。NI提供了多种嵌入式硬件平台,以满足复杂系统的需求。从尖端的机器人研究项目直至高级行业应用,NI平台被证实是高效的机器人解决方案。
2019-11-06 07:50:49
用labview如何编写六足机器人三足步态的程序?主要的依据和原理是什么呢?求指教!
2016-08-04 19:21:05
六足爬行机器人毕业时的作品,当时还处于入门状态,c程序写的比较菜(程序写的比较乱,仅作参考),一直想把这个六足机器人作品优化一下,可惜,一直在忙,现借助电路城这个平台开源给大家,希望大家能继续
2014-03-27 18:51:05
★★★DIY6足仿生蜘蛛机器人 51单片机 WIFI控制★★★网上的6足机器人都是用stm32或AVR单片机做的,可大多数单片机新手只会51单片机,所以就试着用51单片机做个,没想到还真成了,做的好不好大家看看吧。第一版比较粗糙!凑合着看吧!上图:等会上个视频看看效果!
2016-04-15 15:54:33
个可以在平坦地形快速移动的小型双足轮机器人,它能够通过跳跃来翻越障碍。本文给出了机械设计以及系统整体的结构,同样也给出了应对不同场景的多种控制器的开发。在最终的原型机进行了一系列实验,验证了这些行为在
2021-08-30 07:26:06
4实物机器人的结果在本章中,我将展示一下我(和我的同事)对实物机器人测试获得的结果。由于实验时间有限,我们在没有添加UKF的情况下实现了第三章中提出的控制系统。对控制器(主要是身体电机的PD调节器
2021-08-30 06:18:33
的芯片,一定会让六足机器人完成更多的创新!项目描述:开发项目:六足机器人。初步方案:六足机器人,模拟蜘蛛步态,六个足,每只足三个舵机,总共十八个舵机,全部用PWM波控制,前期确定整体结构的设计,然后组装舵机,用固定的动作组(开环)模拟蜘蛛步态。后期设计算法(闭环)使六足机器人更加智能化。
2015-11-25 15:35:26
,平衡小球运动学方程建模,拉格朗日动力学方程,状态控制方程,再到PID参数调解,将小球控制在杠杆的指定位置,当受到扰动后会快速回到平衡位置。4.intel Edison+matlab+3D打印机制作双足
2016-07-13 16:21:18
申请理由:我是在校大学生,大三,在学校的创新团队搞研发,今年5月份申请了省级项目---基于物联网的六足爬行机器人,并且已经审批通过了。正在设计制作此项目。我们发现,现在的机器人都收到空间的局限性
2015-08-09 17:12:20
申请理由:项目描述: 现有一个六足机器人平台,但是没有心仪的开发板来控制,之前有用过STM32F4的单片机。F412ZG的定时器丰富,IO口数量充足,具有各类通信外设,十分适合做六足机器人的控制开发
2016-11-14 18:54:33
申请理由:NanoPi2在体积和性能上非常适合我的项目,我相信有这开发板,我设计的项目一定如虎添翼项目描述:该机器人控制8个舵机模仿人行走,用红外线检测在前方有碍时,会自动转向
2015-12-02 16:10:52
申请理由:手头有个毕业设计是采用stm32的。。想试着换换主控。来作为六足机器人的主控板。。32虽然够用。但是毕竟烂大街。。正好试试学着用用其它款单片机。项目描述:使用申请的开发板做主控。用
2015-07-17 16:53:26
申请理由:我正在做这样一个机器人,遇到了很多问题,非常想学习一下这款板子!我相信利用它能帮我解决难题!项目描述:可利用四足机械结构仿生行进,也可利用车轮进行行进,集四足机器人越障能力强和轮式机器人行动迅速的特点于一身,具有良好的复杂环境地形适应性,可用于灾区侦查、救援。
2015-06-25 19:38:19
申请理由:我是在校大学生,大三,在学校的创新团队搞研发,今年5月份申请了省级项目---基于物联网的六足爬行机器人,并且已经审批通过了。正在设计制作此项目。我们发现,现在的机器人都收到空间的局限性
2015-08-07 22:30:34
申请理由:我是在校大学生,大三,在学校的创新团队搞研发,今年5月份申请了省级项目---基于物联网的六足爬行机器人,并且已经审批通过了。正在设计制作此项目。我们发现,现在的机器人都收到空间的局限性
2015-09-09 17:03:59
申请理由:大学时期所学习的各种课程总是理论性较强,为了是同学们能够亲身体会所学习各科的实用性的必要性,我们选择了设计制作双足行走机器人,在制作过程中让理论与实际结合,让同学们体会到控制理论,代码编写
2015-11-30 15:57:04
摘要我们提出了一个新的开源机器人的腿部力矩控制系统,这个系统的特点是低成本及结构简单。这个系统由高力矩无刷直流舵机和适合阻抗调节和力矩控制的低传动结构组成。同时我们也设计了一个适应冲撞的新型足底
2021-09-13 06:33:53
多自由度人形双足舞蹈机器人套件检测教程——机器人开发系列配套资料:https://www.fengke.club/GeekMart/su_fV1WzKsGQ.jsp 配套视频:https
2022-04-22 14:14:08
多自由度人形双足舞蹈机器人——疯壳·机器人开发系列套件检测教程内容简介本文档主要介绍在如何验证多自由度人形双足街舞机器人套件正常,包括具体线路连接,实验现象验证。具体分为以下几个步奏。1、机器人
2022-08-12 15:55:14
【毕设】六足机器人的设计序这个项目是我本科毕业设计作品,可实现功能有常规控制(前后左右移动、左右自旋)、保持自平衡、三档变速及自主避障功能,历时三个月在家独立完成。应各位的请求写一篇项目技术总结
2021-08-18 07:05:57
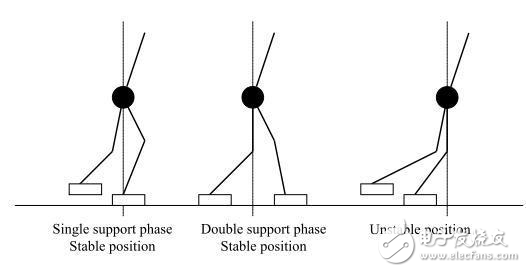
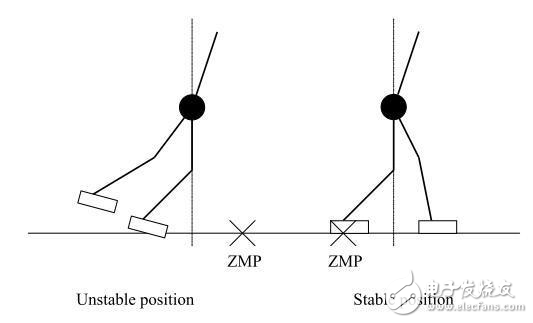
`(不太会用论坛的发帖来编辑,图片的位置都在最后面,附件里有技术报告)一、项目设计背景及概述双足步行机器人是机器人研究领域的热点,它集机械、电子、计算机、仿生学、自动控制、多传感器及人工智能等多门
2014-01-02 14:31:52
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
机器人不都是程序所控制的?所有的信号通过传感器集中到终端通过程序统一处理???
2016-09-20 21:11:47
清洁机器人是服务机器人的一种,所谓服务机器人是指自主或半自主的、从事非生产活动、能完成有益于人类健康的服务工作的机器人。家庭清洁机器人集机械、电子、传感器、计算机、控制、机器入技术、人工智能等诸多
2019-09-05 06:56:37
龙人四足机器人是一种仿生机器人,由Openduino控制板控制,有四条腿,每条腿两个自由度,由两个舵机驱动,能实现两种步态行走。配有三个超声波,实现大角度智能避障。标准演示程序有5个可爱的表演动作。重要技术点: 四足机器人的行走步态设计、舵机的梯形速度控制、多路舵机的协调控制
2016-03-24 16:17:53
近年来,我国机器人产业取得了良好的发展成果,不管是工业机器人、服务机器人还是特种机器人都获得了广泛的应用。这一方面与全球自动化生产需求的不断释放,以及人口红利的日渐式微密切相关,另一方面更是得益于各种智能技术的持续进步与完善。
2020-08-14 07:14:27
《先进机器人控制》从控制的角度系统地介绍了机器人学的基础知识和当前的发展状况。全书共分为12章,由基础篇、控制结构篇和先进控制篇构成。基础篇着重介绍串联关节机器人的运动学、运动规划和动力学。其中
2017-09-19 15:30:57
求大神上传一个六足机器人的骨架图纸
2014-07-28 10:32:54
谁会做六足机器人,求资料??大神们
2013-06-06 00:01:39
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-07-05 07:08:47
工业机器人的四大特征是哪些?工业机器人是由哪些部分组成的?工业机器人是怎样进行划分的?
2021-10-11 09:10:17
我在 Arduino Nano 的帮助下制作了一个四足机器人。但我经常遇到 HC-05 蓝牙模块的问题。所以现在我正在考虑用 ESP8266 替换 Arduino。谁能帮我这个?
2023-06-02 08:12:06
描述迷你平衡机器人大家好。我知道互联网上已经有很多平衡机器人项目,但我也想做一个。实际上,我想制作一些特别的东西并制作一个迷你平衡机器人,但我的步进电机有点失败,我将在下面的视频中解释这个问题。所以
2022-07-07 07:17:03
`华南机器人应用培训中心拥有各种设备,开展各种不同的机器人培训班。打造各种工业现场常见的机器人工作站,现开展KUKA、发那科、三菱、ABB、爱普生工业机器人培训对外招生。 一、认识机器人技术:工业
2015-09-02 14:03:18
`这是创客集结号的作品四足机器人身体和四足都是通过3D打印技术打印出来的,通过自己安装连接上超声波传感器,制作成功的四足机器人完全就很了。`
2018-09-29 09:55:09
四足机器人属于复杂机电系统,需要综合生物、机械、电子、控制等学科内容,具体涉及仿生机构设计、灵巧运动机构设计、高性能驱动器制造,行走稳定性控制、强化学习等在内的多个研究方向。其中,机构设计是保障四足
2021-09-15 06:54:01
本帖最后由 红尘。破 于 2016-8-19 14:59 编辑
今天整理资料时发现了一年前做的四足仿生机器人,当时买了一个四足仿生机器人的骨架,画了个板子,写了个测试代码,能完成简单的行走,后面加了避障、显示功能啥的,不过视频资料没了,只有简单行走的视频,优酷链接在下面评论
2016-08-19 14:59:33
本帖最后由 eehome 于 2013-1-5 10:08 编辑
四足步行机器人的弯道行走
2012-08-12 09:53:57
一。引言 机器人研究是自动化领域最复杂。最具挑战性的课题,它集机械。电子。计算机。材料。传感器。控制技术等多门学科于一体,是多学科高技术成果的集中体现。而仿人步行机器人技术的研究更是处于机器人课题
2020-08-19 06:57:09
通过安芯一号控制双足机器人腿部关节六个舵机的角度以及转动角速度,使机器人完成行走,翻滚,原地360等动作。机器人在规定区域内向前走,通过传感器找到动作区,完成一系列动作;并且可以通过串口与PC机时时通信,传回机器人的参数
2013-09-28 18:58:35
摘要: 介绍了一种由气动人工肌肉构建的双足机器人关节,该关节利用气动人工肌肉的柔性特性,可以有效控制双足机器人快速行走或跑步时的落地脚冲击问题。详细给出了气动人工肌肉的工作原理以及由其构成
2012-12-06 15:32:52
树莓派和其他机器人的控制器有何不同?如何使用树莓派开发智能机器人控制系统?
2021-12-23 06:55:02
如何完整的组装四足机器人?
2021-09-24 07:00:54
手撸六足机器人(三)----------确定控制方式“摇杆模块+LCD屏幕显示+蓝牙通讯”及源码示例[STM32实现]关于这一块,本来是想用0.96寸的OLED实现的(小巧便宜),可惜快递停运。手头
2022-03-02 06:32:31
各位大神,现在小弟想用LabVIEW控制安川机器人,可是通过调用motocom32的DLL不能和机器人通信,听说LabVIEW不能二次开发安川机器人,请问有熟悉安川机器人的高手指点一二,不胜感激!
2014-11-10 12:29:06
如何设计一款球上自平衡机器人?
2022-02-22 07:39:46
席文姣,陈帝伊,马孝义(西北农林科技大学 水利与建筑工程学院,陕西 西安712100)0引言如何设计智能灭火机器人控制器?控制器是智能机器人处理和控制信息的主体,它直接决定了机器人的行为和性能
2019-07-31 06:23:18
工业机器人控制器功能多任务功能一台机器人可进行多个任务的操作;
2019-09-12 09:10:22
库卡机器人伺服电机维修常见故障现象有什么?怎么维修?
2021-11-12 07:27:24
有很多小伙伴喜欢在没事的时候鼓捣一些机器人什么的,现在给大家分享一个仿生机器人开源资料,喜欢的小伙伴可以看看。六足机器人系统基于仿生学原理,采用六足昆虫的机械结构,通过控制18个舵机,采用三角步态
2020-10-10 09:57:11
怎么实现六足机器人的设计?
2021-11-22 08:02:22
怎么实现对机甲大师机器人的控制?
2021-11-19 06:33:45
基于STC15/LPC845的四足机器人是由哪些部分组成的?怎样去制作一款基于STC15/LPC845的四足机器人?
2021-09-26 08:46:16
Ⅳ. 问题讨论1) 设计选择:设计一个低重量的四足机器人,同时保持有效的阻抗和力控制能力需要我们将这些功能相互协调地设计。我们设计一个新型足式机器人,使用无刷直流电机进行驱动,因为它们是一种高性能
2021-09-15 06:04:41
大家应该都知道天津博诺移动机器人的比赛请问手柄控制机器人的程序框图是什么包括子vi可否分享一下求大佬。
2017-12-17 10:27:34
关于ros智能机器人,就是一个写智能机器人代码的一个虚拟机,
2021-10-13 19:20:16
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-06-30 06:37:34
国内首屈一指的机器人公司招聘算法专家,(导航、视觉、控制算法都有需求)控制算法需要有双足机器人的项目经验。硕士生要求5年以上工作经验,博士生3年以上工作经验即可。无论是企业内的专家,还是在高校搞研究
2020-07-03 18:15:17
机械昆虫-六足爬行机器人
2014-08-30 15:38:26
`业余,想想做一做六足机器人。但是苦于无大致图纸,卡在建模的问题上。求六足机器人的图纸,有清晰的尺寸就行(主要是腿)。`
2019-03-26 18:43:17
求契贝谢夫四足机器人的各部件尺寸
2013-11-27 15:42:51
机器人的长期稳定运行。对于控制算法的实现,可以采用PID控制器或者模糊控制器,以达到更加精准的控制效果。
最常见的是TB67S249FTG芯片,它是一种适用于双极性步进电机的驱动芯片,采用了先进
2023-05-11 15:12:45
本人新手,最近在准备制作一个六足机器人,如果利用舵机控制器+遥控手柄套件的话,可以很容易就实现简单的功能。为了能让六足机器人实现更加复杂的功能,我想利用arduino+树莓派+舵机控制器的方式。这样
2015-11-10 15:33:17
六足虫虫机器人概述:新版虫虫用3个微型舵机的协调摆动来行走,通过红外测距来感知环境,还能够感知周围的光线亮度。另外,新版虫虫的中枢依旧是一颗强大的Beetle控制器和扩展板,而且是利用简单易用
2016-08-02 14:43:18
我是新人,求帮助啊,明天需要提交轮式机器人应用的报告,求大神给点建议,可用轮式机器人应用于那些方面,要求实际可行,应用于生活,农业,军事都可以,谢谢啦
2013-04-17 16:32:16
龙人六足机器人是有六条腿的仿生机器人,每条腿有两个自由度,由两个角度舵机控制。控制器采用Stm32机器人控制器,通过编程控制实现12个电机协调的控制行走,实现对六足昆虫的仿生模拟。头部有三个超声波,实现大角度范围的避障。重要技术点:六条腿协调前进 、后退、转弯的算法,超声波导航和避障
2016-03-23 17:49:48
龙人六足机器人龙人六足机器人是有六条腿的仿生机器人,每条腿有两个自由度,由两个角度舵机控制。控制器采用Stm32机器人控制器,通过编程控制实现12个电机协调的控制行走,实现对六足昆虫的仿生模拟。头部有三个超声波,实现大角度范围的避障。重要技术点:六条腿协调前进、后退、转弯的算法,超声波导航和避障
2016-03-24 16:25:46
江智党建机器人是经过多年的市场沉淀 ;现已可以提供系统 全方位的党建机器人服务
2022-06-21 07:59:59
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论