今年以来,由中科院沈阳自动化所自主研制的深海自主水下机器人“潜龙二号”和自主遥控混合式水下机器人“海斗”号先后成功完成试验性应用,前者取得我国大洋热液探测的重大突破,后者在我国首次万米深渊科考航次中成功应用,最大下潜深度10767米。
2016-12-22 11:06:43 679
679 机器人技术不再是未来的幻想,它已经进入了我们的日常生活。但在这一领域,我们缺乏相应的法律法规。比如无人机,现在由美国联邦航空管理局( FAA)来管理,但很多人认为,这完全越权了;比如机器人
2015-01-13 16:39:57
比如说下面的文字模拟一下机器学习过程:我:昨天我喝醉了。机器人:原来,人可以喝醉。我:但我摔了一跤。机器人:摔跤是好事吗?我:是坏事。机器人:那么,人不可以喝醉。因为醉了会摔跤。……我:昨天我喝醉
2016-03-09 14:29:12
,就能依靠经验,学习到很多更好的作业方法,并且熟练掌握。 机器人传感器可分为机器人内部传感器和机器人外部传感器两种。机器人内部传感器的功能是测量运动学和动力学参数,其提供信息的目的是控制机器人按规定
2018-01-03 17:09:03
函数非常多,主要涉及到机器人建模、正运动学、逆运动学、动力学、逆动力学、雅克比、轨迹规划等。对于机器人建模,用到最重要的两个函数就是Link和Seriallink函数(1)Link 类Link包含了与机器人连杆相关的所有信息,例如运动学参数、刚体惯性参数、电机和传送参数等。使用方法:A :关
2021-09-15 09:04:23
`机器人的主要技术参数 机器人的技术参数反映了机器人可胜任的工作、具有的最高操作性能等情况,是设计、应用机器人必须考虑的问题。机器人的主要技术参数有自由度、分辨率、工作空间、工作速度、工作载荷等
2017-08-15 14:00:52
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
本帖最后由 eehome 于 2013-1-5 10:05 编辑
水下机器人水面控制台通常基于计算机平台,体积较为庞大,不便于移动。但在某些情况下,如水下机器人水面回收或者水面测试载体各种航行
2011-03-08 14:21:34
工程训练综合能力大赛——水下机器人管道巡检组赛后总结前言一、水下机器人管道巡检组内容简述二、功能实现1.巡检管道2.识别吸附物总结前言前段时间参加了工程训练综合能力大赛——水下机器人管道巡检组,非常
2022-01-11 06:51:45
:机器人动力学建模、参数辨识以及力矩控制。下面对这三个步骤进行简单介绍。第一步是建立机器人动力学模型,利用牛顿欧拉法或者拉格朗日法推导出机器人动力学的解析表达式。DeX-Platform中包含了用于计算
2018-03-02 14:42:06
,电机闭环控制,运动力学受力分析及部件受力分析,矩阵不等式实验,运动行走倒立摆实验、。4) 运动算法:路径规划,自主定位,运动导航,自建地图。5) 嵌入式实验:嵌入式软件运用及6) 人机交互:脑电波、视觉及肢体等对机器人控制,心理学研究,互联网、物联网实验及信息处理。`
2015-02-12 15:17:18
本书系统地介绍了工业机器人的基本组成、机械机构、运动学及动力学、控制系统、编程与调试、典型应用、管理与维护等内容。全书共7章,第1章介绍了工业机器人的发展与应用、机器人的组成与分类;第2章介绍了工业
2022-10-16 21:21:57
近来,在与客户工程师的沟通中了解了一些系留无人机和水下机器人等方面的系统应用,两种设备虽然完全属于不同的行业领域,但是供电的构架却有很多相似之处,这里粗略整理一下,分享给大家。系留无人机电源构架系留
2019-08-16 11:15:31
Dynamics)多柔体动力学分析技术,可以更加真实地分析柔性体的非线性问题如大变形、柔性体之间的接触、柔性体和刚性体之间的接触等;在RecurDyn仿真平台上,能够建立控制-机械-液压一体化完整
2009-03-24 15:12:31
世界的交互的学科分为三类:传感器和处理算法;多刚体系统动力学控制;机器人自主移动。 智能机器人会成为未来世界的灾难吗?对机器人或人工智能的研究会帮助我们更好的了解人类自己吗?人工智能将会怎...
2021-07-28 08:07:50
宣传片。当然,该公司的业务范围自然也涵盖了自动动画和机器人领域。2. 机器人公司波士顿动力公司(Boston Dynamics)波士顿动力公司以生产动物外形的机械人闻名,在成功收购波士顿动力公司后,外界才
2014-12-30 16:31:19
请问一下机器人的计算工作是否用MATLAB在计算呢?能简单说明一下吗?
2014-05-30 16:58:20
,对工业机器人的运动学、动力学、基本控制系统等传统内容的介绍比较简洁,对机器视觉、机器听觉和移动机器人的自主定位等新技术介绍较多,并以可重现的若干实例对相应技术和方法进行了验证,相关程序代码附在书中,重点
2016-06-01 13:12:46
机器人学的核心问题是做好和物理世界的交互。现在主流的机器人学分支里,处理与物理世界的交互的学科分为三类:传感器和处理算法;多刚体系统动力学控制;机器人自主移动。 智能机器人会成为...
2021-07-28 08:03:48
项目名称:水下智能机器人试用计划:1.对BeagleBone Black硬件资源进行测评2.通过烧写ubuntu系统 结合硬件资源进行软硬件测试3.基于ubuntu,stm32,电力猫三个硬件构建水下机器人4.项目开阵。按时间完成计划5项目调试 资源分享。预计成果:发表帖子分享项目开展过程,结果,经验。
2017-07-04 16:55:05
摘要:本文主要介绍如何根据国外开源项目(OpenROV)开始自己DIY一个水下机器人。关键词:水下机器人 DIY背景水下无人机在近两年大热,经常出现在各种众筹平台,在大学生的挑战杯等比赛上也能见到其
2017-07-25 20:23:28
项目名称:渔业卫士-基于图像识别的多自由度水下机器人试用计划:1、申请理由希望早日接触、应用国产的鸿蒙系统。2、项目名称渔业卫士-基于图像识别的多自由度水下机器人3、计划(1)约三个月时间,应用该款
2020-09-25 10:11:50
项目名称:水下机器人探测项目试用计划:1、我是广东海洋大学嵌入式工作组的成员 丘子枫,现在是大三的学生。从大一开始就从单片机开始慢慢接触嵌入式的东西。参与设计的了我校首个水下机器人,并且从大二的时候
2017-06-01 09:45:11
智能机器人项目实战(免费)本课程着眼于实际应用,循序渐进的进行机器人实战;并在实战中提升基础能力,从结构设计基础、三维设计软件的应用、运动学和动力学仿真、C语言基础、单片机的应用、嵌入式开发、高级
2014-02-23 14:42:46
Ⅲ 建模为了使用基于模型的控制策略以及现代状态估计技术,需要一个描述机器人刚体动力学的系统模型。A. 坐标和符号规定旋转规定:a˙\dot aa˙ 表示对时间的导数, ̂a^{\hat a}a^表示
2021-09-15 08:12:14
传感器数据如何为机器人技术中的人工智能提供动力
2020-10-10 18:19:22
《先进机器人控制》从控制的角度系统地介绍了机器人学的基础知识和当前的发展状况。全书共分为12章,由基础篇、控制结构篇和先进控制篇构成。基础篇着重介绍串联关节机器人的运动学、运动规划和动力学。其中
2017-09-19 15:30:57
系统的管理、通讯、运动学和动力学计算,并向下级微机发送指令信息;作为下级从机,各关节分别对应一个CPU,进行插补运算和伺服控制处理,实现给定的运动,并向主机反馈信息。根据作业任务要求的不同,机器人的控制方式又可分为点位控制、连续轨迹控制和力控制。`
2017-08-09 16:30:09
分享一下水下机器人的电机控制(针对的是直流无刷电机+双向电调的模式)。其实一句话就说明白了,频率50hz的方波,1.5毫秒占空比是初始化;假如1~1.5毫秒正转,1.5~2毫秒反转,反之亦然。1.5
2021-09-16 08:43:15
分布式驱动电动汽车动力学控制问题车辆动力学控制的控制目标是改善车辆的安全性、转向特性、操控性、乘坐舒适性,并且减轻驾驶员的工作负担,尤其是在紧急行驶工况下,可以控制车辆的动力学性能,包括纵向、侧向
2021-08-30 07:23:04
分析ANSYS的基本功能介绍超弹性材料柔性手指的形变分析硅胶材料柔性机器人的形变分析五、静、动力学分析实例软体机器人运动学分析软体机器人静力学分析软体机器人动力学分析与实例六、软体爬行机器人设计仿真
2021-09-02 11:17:25
`华南机器人应用培训中心拥有各种设备,开展各种不同的机器人培训班。打造各种工业现场常见的机器人工作站,现开展KUKA、发那科、三菱、ABB、爱普生工业机器人培训对外招生。 一、认识机器人技术:工业
2015-09-02 14:03:18
跑。它的体型与一只大狗或小驴差不多大,也是由DARPA提供资金。[/url]这个巨大的水下机器人叫做「螃蟹龙虾机器人」(Crabster),样子很像螃蟹和龙虾的结合体。它能够在湍急的水流中开展工作
2016-08-24 10:33:05
四旋翼飞行器的动力学建模及PID控制
2015-06-20 17:05:05
目的 本文手把手教你在 Mathematica 科学计算软件中搭建机器人的仿真环境,具体包括以下内容: 1 导入机械臂的三维模型 2 正\逆运动学仿真 3 碰撞检测 4 轨迹规划 5 正\逆动力学仿真 6 运动控制 文中的代码和模型文件点击此处下载,
2021-09-07 07:38:54
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。 实验结果表明
2023-09-20 06:24:09
基于多体系统动力学的空气悬架大客车平顺性试验仿真研究本文以空气悬架大客车为研究对象,采用多体系统动力学的理论方法,应用ADAMS 软件建立了DD6115H 型空气悬架大客车八十五自由度整车动力学模型
2009-12-02 12:38:55
智能水下机器人在海洋石油开发、矿物资源开采、打捞和军事等方面都有广泛的应用前景[1][2][3]。水下机器人已经开始取代过去由载人潜器和潜水员所承担的工作,尤其是在大深度和危险区域发挥了更大的优势。
2019-10-29 07:22:16
小型四轴飞行器动力学参数是多少?
2013-10-15 18:56:20
随着中国制造业转型步伐的加快,机器人的使用越来越频繁,作为工厂里的技术工程师必需了解机器人的相关技术,那么通用机器人由什么部件组成呢?
2020-05-13 07:45:10
、机器人专用语言、机器人运动学、动力学软件、机器人控制软件、机器人自诊断、白保护功能软件等,它处理机器人工作过程中的全部信息和控制其全部动作。示教系统是机器人与人的交互接口,在示教过程中它将控制机器人
2017-12-15 10:25:19
的作用。 根据工业机器人的发展趋势,本书在编写内容上略有偏重。对工业机器人的运动学、动力学、基本控制系统等传统内容的介绍比较简洁;对机器视觉、机器听觉和移动机器人的自主定位等新技术介绍较多,并以可重现
2015-02-03 10:51:09
机器人视觉传感器详解一种新型的工业机器人已经走到行业的前沿, 他们的主要特点是能够安全地协助人类工作。在网上有很多人谈论它们,但你认真了解过它吗?
2020-08-14 07:24:17
期,发展至今,机器人已能广泛应用于制造业、非制造业以及服务人类,产品种类包括:水下机器人、娱乐机器人、军用机器人、扫地机器人等等。目前,家庭清洁机器人是使用数量最多、应用范围最广的一类家务服务机器人
2017-05-27 13:31:20
有什么机器人技术的资料?单片机开发的.
2011-06-21 10:42:25
气体动力学在流量测量电子技术中的应用
2021-04-01 06:45:46
汽车系统动力学 喜欢的小伙伴可以下载
2017-11-01 10:40:51
瑞士联邦理工学院 Pascal Buholzer 和他的学生设计的Sepios水下仿生机器人,解决螺旋桨推进器的水草缠绕和噪音问题。
2015-01-13 15:52:06
电力拖动系统的动力学课件电力拖动系统的动力学Dynamics of Electric Drive Systems1.了解电力拖动基本概念;2.熟悉电力拖动系统运动方程式;3.掌握拖动转矩和负载转矩
2008-11-19 22:14:17
。能够携载着装备物资跟随士兵不间断地行进20英里这款机器人还可以进行伪装,使它能很容易地溶入所在环境之中大狗机器人是波士顿动力学公司设计的一系列机器人之一,它能够直身站立,负重400磅不间断地行走20
2015-01-16 14:31:06
请问各位在labview MathScript节点中 以下这个机器人的动力学公式应该怎么编写呢?谢谢大家了!!
2017-11-16 19:22:42
飞行器动力学参数在线辨识EKF算法实验流程飞行器俯仰通道动力学方程线性化飞行器俯仰通道动力学方程离散化线性卡尔曼滤波过程实验流程 飞行器俯仰通道动力学微分方程是连续非线性方程,要进行扩展卡尔曼滤波
2021-08-27 06:06:16
,得到颗粒在不同初始位置的运动轨迹。将计算结果和现有的解析解对比分析,初步验证了所建数学模型的正确性,为进一步的数值计算和试验研究提供理论基础。【关键词】:高梯度磁场;;磁分离;;动力学模型【DOI
2010-05-13 09:11:32
热分析动力学:本分析以热分析动力学议程为主线,本书内容共分为三部分:第一部分包括热分析动力学理论,方法和技术的回顾。两类动力学议程和三类温度积分式的数学的推导。
2009-12-01 14:46:30 0
0 提出一种分层路径规划算法来解决大范围海洋环境下的智能水下机器人(AUV)的全局路径规划问题。该算法将
2010-03-03 14:52:0118 空间柔性机器人动力学分析的快速积分算法:以空间柔性机器人为研究对象,分析了机器人柔性多体系统动力学建模过程,研究了根据广义动力学方法所建立的大型微分-代数方程的
2010-03-18 16:24:1821 。 BEAR-H系列 外骨骼机器人是全球首款采用了柔性驱动器作为动力输出的外骨骼机器人。 BEAR-H1 拥有带动力的6关节(双侧髋、膝、踝),和髋
2023-09-20 17:25:48
分析了跨越式高压输电线路巡线作业机器人的结构特征,采用D-H法构建巡线机器人空间坐标,用Lagrange方法建立了机器人机械臂的动力学模型。基于此动力学模型,对一种典型工况进行了机械臂各关节动力学
2016-01-04 15:10:4921 水下机器人是建设海洋强国、捍卫国家安全和实现可持续发展必需的利器。我国水下机器人研制经过多年追赶,部分技术已与国外看齐,亟待进一步整合产业链条资源,积极推动水下机器人成果转化,应对新一代全海深、全海域、组合化水下机器人研发。
2016-12-22 09:40:121167 自治水下机器人自适应滑膜控制_吴宝举
2017-01-30 23:17:315 依靠NI myRIO控制的4块鳍,敏捷的水下机器人Sepios能够向6个方向移动 这个方案将向您演示一个采用NI MyRIO控制的4鳍水下机器人方案,这个由学生制造的Sepios水下机器人依靠
2017-02-08 20:24:38475 机器人学:运动学、动力学与控制 -宋伟刚
全书共分10章。第1章介绍了机器人技术的发展及其种类、工作原理,机器人设计、控制与编程的基本方法。第2章和第3章介绍机器人机械 系统分析的数学、力学
2017-07-19 09:53:310 无人机来源于航模,航模有很多开源的项目,而水下机器人开源的项目非常少,如果要从事水下机器人的创业,很多设计都需要从零开始。
2017-09-22 07:29:2614016 随着人工智能大潮的逐渐渗透,近年来各个国家对海洋资源越来越看重,纷纷加大了水下机器人的研发投入。美国、日本、法国作为最早一批研制水下机器人的国家,如今早已掌握了先进的水下机器人技术。
2017-09-27 15:10:42876 的动力学方程。使用序贯滤波和光滑化最优估计理论方法对广义质量矩阵进行了分解与求逆,实现了0(n) 次高效率计算。在Mathematica 6.0 中编制了程序对2 个平面3 自由度机械臂闭环系统进行仿真验证。仿真结果与ADAMS 结果进行的对
2017-10-17 17:28:0916 自主式水下机器人(Autonomous Underwater Vehicles,AUV)代表了未来水下机器人技术的发展方向,是当前世界各国研究工作的热点。对AUV的实时监测和控制是AUV能否安全高效
2017-10-25 11:46:351 针对传统的机器人控制器设计容易受到水流冲击压力不定的因素干扰,导致控制器稳定性差、工作效率低下的问题。提出一种6 自由度下的水下机器人控制器抗干扰设计方法,通过水下机器人 自由度空间动力学方程,及其
2017-10-28 13:04:499 类比已经趋于成熟的空中无人机市场,水中机器人未来消费级市场规模可达百亿级。在2015年,商业嗅觉敏锐的黄俊平看中了水下机器人这片蓝海,组建了一个研发能力强、能根据市场反馈快速迭代的技术驱动型团队
2017-11-30 15:57:206564 为了实现对水下机器人周围环境的监测,提出了一种基于PC104与C8051F120的水下机器人环境监测系统设计方案,并完成系统的软硬件设计。
2018-03-21 09:23:002013 
针对Delta机器人运动过程中因弹性变形导致的误差问题,基于有限元理论对其弹性动力学问题建立了数学模型并进行了研究。根据机构特点,将机器人的各构件分别划分为刚性体与弹性体,形成了一个刚柔结合的系统
2018-03-08 11:44:581 针对水下机器人进行水下检测时的实时控制和监控问题,对水下机器人的推进器结构、运动方式、通讯方式、机体状态显示方式、运动控制方法等方面进行了研究,对水下机器人实现高效水下检测所需的各功能需求进行了归纳
2018-03-14 15:36:246 随着海洋资源的不断开发,水下机器人作为一种先进的探索被不断应用到该领域,得到了快速的发展以及高度的重视。
2018-07-25 17:11:008306 从“上天”到“下海”,水下机器人作为机器人新形态的出现也为人工智能的发展拓宽了领域,而作为发展的新方向,其也应“大有可为”。
2018-05-26 10:35:0020912 水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。由于水下环境恶劣危险,人的潜水深度有限,所以水下机器人成为开发海洋的重要工具。水下机器人都有哪些鲜为人知的“十八般武艺”?一起来看看吧。
2018-07-07 09:28:3014474 8月6日,第21届国际水下机器人竞赛在美国圣迭戈落幕,哈尔滨工程大学E唯代表队夺得冠军。这是我国高校首次在世界顶级水下机器人大赛中夺冠。
2018-08-08 16:43:405215 水下机器人的工作环境是不同的水域,水下状况多变,对机器人的技术要求提出了更高的挑战。水下机器人制造技术密集性高,主要包括仿真、智能控制、水下目标探测与识别、水下定位、通信、能源系统六大技术。与发达国家相比,我国水下机器人制造的一些关键材料与技术研究领域仍有一定的差距,还需不断发展突破。
2018-09-08 09:44:131395 本文结合水下机器人(ROV)在阳江核电厂取水口海生物监测中的应用实例,介绍了ROV的原理、系统组成、主要功能、作业流程,总结出国产水下机器人( ROV)用于核电厂冷源取水口海生物监测的优势,同时展望水下机器人在我国核电行业应用的广阔前景。
2019-05-08 09:38:425969 随着人工智能的快速发展,在恶劣的工作环境下,用机器人替代人工的做法越来越广泛,在2019数博会人工智能全球大赛武汉分赛区比赛中脱颖而出的大智若鱼——子母型多功能水下机器人便是其中之一。
2019-05-16 10:32:11962 利用人工智能帮助水下机器人适应各种极端环境,以完成勘察水中建筑安全状况的任务。
2019-07-11 15:52:18913 水下机器人是高技术的集成,虽然水下机器人本体的各种材料及相关技术已基本成熟,但随着水下机器人向大范围、大深度、长续航、多功能的发展,一些关键技术还需研究解决
2019-07-17 16:15:2512531 中车株洲所旗下的SMD公司,在英国阿伯丁举行的SPE Offshore Europe展会上,发布了一款具有超强作业能力、绿色环保工作级电驱动水下机器人(简称ROV)——QUANTUM/EV。
2019-09-05 09:36:26716 由于水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。20世纪后半叶诞生的水下机器人,在机器人学领域属于服务机器人中的特种机器人类别。
2019-12-26 10:36:552414 水下机器人是一种技术密集性高、系统性强的工程,随着应用领域的不断扩大,水下机器人会向着体积更小、兼容性更强、智能化程度更高的方向发展。
2020-01-24 16:59:00752 相对于陆地,人类在水下环境工作的困难程度和危险程度都要更高。特别是海洋环境更为复杂,也更容易遇到意外风险,所以一些水下作业用水下机器人取得人类来进行是必要的。
2020-05-10 15:14:55554 地球约有71%的面积覆盖着水,在水下蕴藏着丰富的资源。但全球海洋的平均深度超过3000米,人类难以在此环境下长期生存,使用机器人来探索、开发这些水下资源成为一个更好的选择。遥控水下机器人ROV是一种
2020-07-09 18:04:37651 随着国内海洋石油工程、海洋科考、海洋打捞等领域对水下机器人使用需求的不断扩大,相关政府部门在项目立项与实施方面水下机器人的产业化发展给予政策倾斜,未来我国水下机器人产业化、规模化进程将会进一步加快。
2020-08-18 10:04:343245 音圈模组水下机器人为生命护航。大家都知道海洋底有很多奇妙的神武等着我们去探索和发现,而且一些水底救援工作要开展,人们潜入到水底是很危险的事情,因此水下机器人就横空出世了。是能代替人类作业的水下救援及巡检机器人。
2021-03-24 14:49:00748 门槽及门叶水下检查和尾水管检修闸门及门叶水下检查。 在现场,武汉长江航道救助打捞局技术人员操作水下机器人下潜80米,圆满完成坝前某机组检修闸门和事故闸门检查的任务。 据悉,本次任务圆满完成,得到了业主的一致认可,水下机器
2021-04-09 17:06:302164 机器人原理与应用之机器人动力学教程免费下载。
2021-05-19 17:48:2028 Matlab_Simulink动力学系统建模与仿真01.pdf
2021-09-30 17:09:240 Matlab_Simulink动力学系统建模与仿真02.pdf
2021-09-30 17:10:190 水下机器人行业主要集中在北美、欧洲、中国、日本等国家和地区。目前,中国是最大的生产地区。从消费端来看,2018年中国水下机器人行业占全球销量的25.07%,中国巨大的市场需求和增长潜力,吸引了几乎所有国际巨头在中国开展相关业务。
2022-06-08 11:35:226619 以多体动力学分析为例。机器人一般都包含多个可动的关节。为了让机器人的工作表现达到预期目标,在设计阶段就需要建立机器人的多体动力学数字样机,来评估机器人的动力学、运动学特性。
2023-03-01 10:45:37686 电子发烧友网站提供《水下机器人开源构建.zip》资料免费下载
2023-07-11 10:45:521 这个“长着三个触角”的水下机器人看上去是不是很萌?它使用的是一种新型的由三个球形磁耦合矢量推进器组成的推进系统。与传统的水下机器人使用多个固定推进器来实现多自由度(DOF)推进相比,矢量推进器具有多自由度、寄生推力小,以及效率高等优势。
2023-08-24 11:21:41913 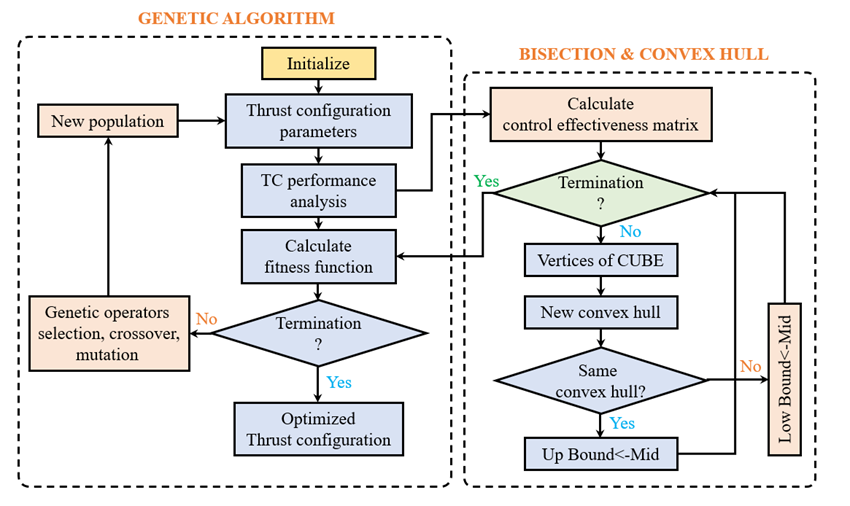
基于车辆运动学模型的方法忽略了车辆的动力学特性,因此在 车速过快 或者 曲率变化率过大 的情况下该算法无法满足车辆的稳定性控制要求。 这里介绍一种典型的基于车辆动力学模型的横向控制方法,包括: 车辆
2023-11-15 16:47:48246 
机器人具有高度非线性,强时变以及强耦合等动力学特性,为了提高机器人控制的性能,研究人员提出了基于模型的控制(Model Based Control)方法。 在机器人研究领域,多种常见的高性能机器人
2023-11-17 17:43:55361
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论