相较传统的超外差接收机,零中频接收机具有体积小,功耗和成本低,以及易于集成化的特点,正受到越来越广泛关注,本文结合德州仪器(TI)的零中频接收方案(TRF3711),详细分析介绍了零中频接收机的技术挑战以及解决方案。
2013-09-25 14:02:14 6707
6707 
GNSS 卫星准确轨道位置的 误差•整个卫星设备相对于其他卫星的一般性能漂移,也就是所谓的卫星偏移•信号在通过电离层和对流层时发生失真和延迟。•多路径反射和接收器中的可变性能和漂移目前,设计者可以采用各种
2022-06-28 13:33:32
受到国内外各大集群设备生产厂商的高度重视。因此,文中提出一种专门针对DMR系统的接收机设计,对射频信号采用两次下变频,先后得到45.05 MHz和455 kHz的两个中频信号,最后再由鉴频芯片TA31
2019-06-20 07:16:07
。所以,在原有的单模接收机的基础 上研发更高精度、更加稳定耐用的双模接收机成为研究的核心。本文提出了一种GPS/Galileo双频双模接收机射频前端系统的设计方案,该方案结合现有资源,展示出了该种接收机设
2019-07-09 07:55:43
首先简介GNSS数字接收机的一般架构,然后介绍HD-GR接收机的硬件架构,包括它的接收机底板(HD-GR-1)和它的射频前端模块(HD-2769-2RF-2)。
2022-01-13 06:54:45
TD-SCDMA接收机。这种灵巧的设计支持多载波、分集接收机系统中的各种应用。仿真和实验结果表明,这种紧凑型接收机具有杰出的线性度和相位-噪声性能。 2000年5月,由中国电信科学技术研究院(CATT
2019-07-15 08:20:26
C6748核心板模式进行,利用核心板及DSP开发板进行前期算法验证工作。故申请TMS320C6748 DSP开发板免费试用。项目描述:项目用于实现GNSS组合惯导接收机,GNSS卫星信号的解算提供长稳的精度,利用高精度惯导器件提供短稳精度,两者组合采用捷联式惯导进行组合运算,得到高精度的惯导信息。
2015-09-10 11:13:56
美国GPS、中国北斗、欧洲伽利略等系统的多模多频软件接收机。采用的主控芯片为TI的一款OMAP双核芯片,配合外部的FPGA及其他需要的芯片实现。项目完成后可以配合上位机软件的丰富图形用户界面实现定位、授时、导航等功能。
2015-11-06 09:54:13
C674x 项目描述:板卡可通过McBSP接口直接读取AD采样的中频数据,或利用其它外设接口读取存储在其它设备上的数据记录。在DSP内部实现中频数据的解调解算。同时可利用C6748的丰富外设资源,读取惯导数据,实现灵活的紧耦合接收机。
2015-09-09 17:04:00
析软件组成,安装方便快捷。接收机采用高精度多模多频板卡,根据不同的需求配置不同的北斗/GNSS板卡,数据通信方式采用无线电或网络方式,可以作为基准站或移动站使用。二、工作原理GNSS的基本原理是测量出已知
2023-04-02 14:08:46
本文比较三种常用接收机架构的优势和挑战:外差接收机、直接采样接收机和直接变频接收机。还会讨论关于杂散,系统噪声和动态范围的额外考虑。本文的意图并非要褒扬某种方案而贬抑其他方案,相反,本文旨在说明这些方案的优点和缺点,并鼓励设计人员按照工程准则选择最适合特定应用的架构。
2019-09-19 07:30:32
关于创新高精度数据采集SoC的设计方案
2021-04-07 06:19:32
本文提出了一种能够很好地反映卫星通信中星地链路特性的模拟系统设计方案。在确定硬件设计方案之前,搭建了合理的信道仿真模型,并对仿真结果进行了分析。
2021-04-08 06:09:33
利用可编程片上系统(SOPC)技术,设计了一种基于FPGA的GPS接收机。提出了基于多普勒频域移位的捕获策略,并分析了捕获时间。基于延迟锁定环与Costas 环跟踪方法,给出接收机的SOPC实现
2023-09-19 06:34:35
作者:杨霏一、 引言我们独立自主开发了数据广播编码器和微型低功耗调频数据广播接收机,整套系统采用连续相位频移键控(CPFSK)调制方式,副载波频率为72KHz,占用带宽约16Khz,数据传输速率
2019-07-18 06:28:46
`<p><font face="Verdana"><strong>对讲机设计方案
2009-11-25 14:38:51
方便快捷。接收机采用高精度多模多频板卡,根据不同的需求配置不同的北斗/GNSS板卡,数据通信方式采用无线电或网络方式,可以作为基准站或移动站使用。二、 工作原理GNSS的基本原理是测量出已知位置的卫星
2023-03-21 09:38:44
怎么实现汽车中的红外遥控发射器和接收机设计?
2021-05-18 06:15:40
本文将介绍数字音频广播(DAB)接收机的样机设计。
2021-05-27 07:11:13
高速信号仿真在定位接收机设计中的应用是什么?
2021-05-25 06:09:26
针对差分跳频技术提出了一种G函数的非二进制卷积编码的等效模型,给出了差分跳频信号的最佳接收机设计方法,研究了维特比硬判决和维特比软判决两种最大似然检测算法,并
2009-02-28 16:39:03 25
25 依据GSM协议,结合GSM数字移动通信系统信号传输的特点,给出了基于GSM系统的带软输出结构的MLSE接收机的设计方案,阐述了MLSE接收机的实现算法。实际环境的试验结果表明:工程实
2009-05-24 11:47:0917 本文提出了一种基于射频采样的短波侦察接收机设计方案。该方案利用软件无线电技术,可以更好的实现对多路不同频率、不同调制类型的短波信号的接收和侦察;有更好的灵活
2009-06-18 08:56:0034 多任务处理是北斗导航接收机设计的关键环节,本文采用μC/OS-Ⅱ实时操作系统,完成了在北斗导航接收机中的多任务处理及任务间的通信,解决了实时性、稳定性的问题。研究并设
2009-08-06 11:15:2963 文章分析了短波数字接收机模拟前端的总体设计方案,包括前端各部分增益的分配与计算、AGC 起控点与饱和点的选取以及整个前端噪声系数的计算,讨论了各部分模块的具体实现
2009-09-03 08:53:2553 本文主要介绍一种以Centrality 公司AT642 为控制芯片的低成本、低功耗的便携式GPS接收机的设计,并给出了该接收机的硬、软件设计方案。详细介绍了影响GPS 接收机接收灵敏度的硬
2009-12-31 16:31:3521 GNSS 接收机之从理论到实践Merako GNSS 研发平台最佳实战-零成本获取 GPS 研发经验-两周实现自有算法的下载和运行-开放式通用 GNSS 研发平台导航定位作为一
2010-02-08 09:06:4767 针对雷达侦察接收机带宽较大,处理速度成为后续数字信号处理的瓶颈,提出一种基于多相结构的宽带数字信道化接收机设计方案,通过信道化降低后续信号处理速度,提高信号的
2010-12-28 10:25:1628 针对目前国内RFIC发展比较滞后的现状,设计了3款应用于GNSS接收机的基于0.5μm SiGe HBT工艺的混频器(Ⅰ、Ⅱ、Ⅲ),并采用针对混频器的优良指数FOM(figure-of-merit)对这3个混频器进
2011-01-04 16:34:4531 本文介绍的调频接收机利用超再生调频接收原理,因采用了高增益微型集成电路,故电路简单新颖
2006-04-16 19:25:34622 
差分跳频信号最佳接收机设计
2.1 差分跳频信号最佳接收机实现方法根据差分跳频的原理可以将接收机划为差分跳频信号解跳器和最大似
2009-03-01 17:05:32857 
基于AD608芯片的对数中频低功耗接收机设计
在移动通信系统中,由于信号传输过程存在多径衰落和传输衰减等因数,使得系统中的移动终端接收信号的动态范围较
2009-11-17 17:30:161795 模块化FPGA设计在某雷达接收机中的应用
0 引言 目前基于FPGA和DSP结构的软件无线电技术被广泛应用在数字接收机设计中,雷达接收机领域的数字化技术
2009-11-24 17:15:39835 
模块化FPGA设计在某雷达接收机中的应用
0 引言 目前基于FPGA和DSP结构的软件无线电技术被广泛应用在数字接收机设计中,雷达接收机领域的数字化技术
2009-11-24 17:17:41831 
MSP430单片机在微型低功耗数据广播接收机中的应用
一、 引言我们独立自主开发了数据广播编码器和微型低功耗调频数据广播接收机,整套系统采用连续相位频移键
2009-11-26 17:57:49547 
DMR终端锁相调频接收机设计
2004年,欧洲电信标准协会(ETSI)提出新型数字集群通信系统DMR(Digital Mobile Radio),DMR系统与TETRA和iDEN系统相比具有易于实现、成本低廉等优势,已经
2009-12-05 18:02:151581 基于AD9640的无线接收机设计
在无线接收机射频前端硬件的实际制作中,中频频率的选择、带通滤波器的中心频率与3dB带宽、外部无源器件的使用等设计考虑,都需要随
2010-02-06 10:30:241093 
GPS接收机性能验证测试设计方案
如今从手机到个人导航设备(PND),再到照相机和带有RFID标签的其他同类产品,电子世界到处都有GPS的身影。尽管G
2010-03-08 16:32:081065 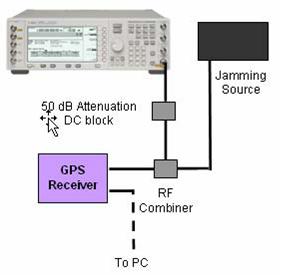
直接变频接收机可实现多标准/多频带运行的设计方案
现代直接变频技术可为现场可编程无线
2010-04-15 11:57:483237 
高性能TD-SCDMA接收机设计方案
在中国,时分同步码分多址(TD-SCDMA) 作为宽带
2010-04-16 14:41:22623 
本文将介绍数字音频广播(DAB)接收机的样机设计。
系统的性能要求
欧洲DAB系统规定了4种模式,本设计采用的是第1种模式,具体参数如表1所示。
2010-09-12 09:23:426361 
本书系统地阐述了卫星广播接收机的原理及整机设计所必备的基础知识、整机的设计方法以及设计所用基本共识的推导过程
2011-09-02 14:50:10161 MAX2769B是下一代全球导航卫星系统(GNSS)接收机,用于GPS,GLONASS,伽利略和北斗导航卫星系统在单一芯片上的。这种单转换GNSS接收机是专为工业和汽车应用提供高性能。
2011-09-05 18:13:262202 本文提供了一种数字扫描控制器设计新方法。采用该方法,成功开发了一种新型微波毫米波接收机,其扫描控制精度、扫描速度等指标较以前的接收机产品有了很大的提高。
2011-09-27 10:31:281188 
本内容提供了全数字扩频接收机的设计方案
2011-10-11 15:10:0839 本文介绍了一种GPS接收机的整体设计方案,该方案采用Atmel公司生产的ATR0600和ATR0620芯片。其中ATR0600芯片作为接收机的射频前端,内嵌ARM7TDMI处理器核的ATR0620芯片作为接收机的数字基带处
2011-12-15 10:09:112431 
位于瑞士的定位和无线模块及芯片公司u-blox宣布推出最新业界公认的封装形式多模GNSS接收机模块MAX-7、NEO-7和LEA-7。
2012-10-17 15:03:091671 随着GPS、GALILEO、GLONASS以及我国北斗导航定位系统的不断发展,基于多星座下的GNSS接收机自主完好性监测算法也已被国内外学者广泛研究。本文首先介绍了接收机自主完好性监测(RAI
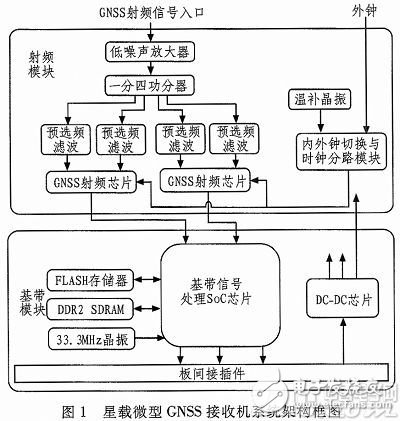
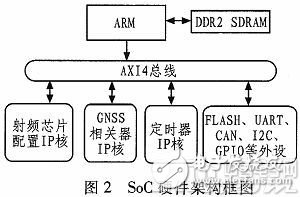
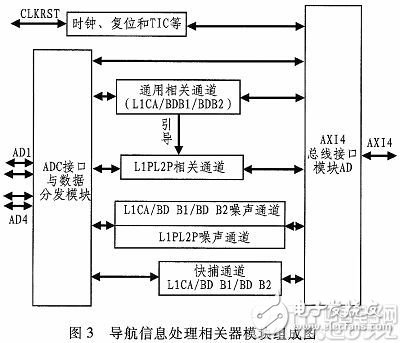
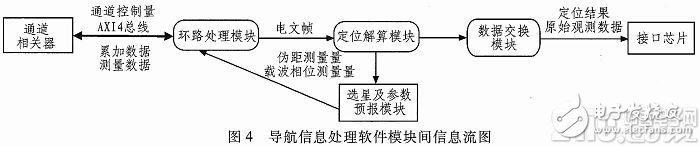
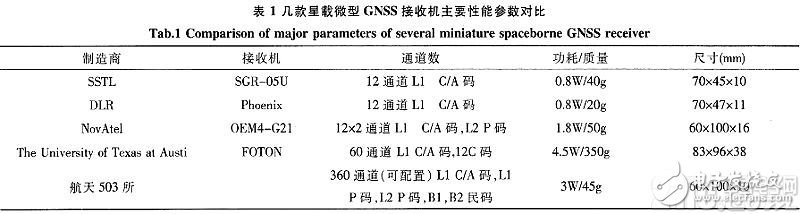
2013-02-22 15:43:2530 针对皮纳型卫星对星载GNSS接收机小型化、低功耗以及低成本的要求,提出采用片上系统(SoC)技术完成星载微型GNSS接收机的设计。在该设计中,基带信号的捕获、跟踪与定位解算等全部在SoC内完成,具有
2016-01-04 14:51:280 Xilinx FPGA工程例子源码:扩频接收机设计实例
2016-06-07 15:07:458 一种用于低功耗GNSS接收机的新型正交LMV电路_熊智慧
2017-01-07 22:23:130 基于CBOC信号的导航接收机设计与实现
2017-01-14 11:26:486 基于AVR单片机的一体化GPS接收机设计
2017-02-07 16:14:5617 射频前端模块性能关系到整个接收机的性能。本文通过对接收机进行研究,分析了超外差接收机的特点,提出了一种采用PLL技术的接收机的射频前端方案,及对射频前端的关键技术指标进行了分析。并通过软硬件平台进行
2019-03-14 16:47:361696 
频谱搬移的混频器,是十分重要的模块。本文研究的最终目的是得到一个宽带应用的低噪声混频器,适用于GNSS接收机。
2017-11-24 10:44:43703 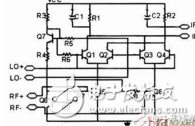
本设计混频器应用于GNSS接收机,它要求接收的射频信号频率范围在1~1.6GHz之间,本混频器也要求在这范围内拥有较高的增益和较低的噪声系数。图3为这一变化范围内的增益和噪声,这是经过多点测试,然后用描点法描出来的。
2018-07-10 07:11:001476 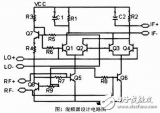
在磁共振成像(MRI)系统中,信号接收链路需要将MRI模拟信号数字化,其数字化部分的设计方案和性能,直接影响磁共振图像质量,最初的接收机设计思路是首先进行模拟正交检波,然后再使用模数转换器(ADC
2018-02-01 10:33:220 针对皮纳型卫星对星载GNSS接收机小型化、低功耗以及低成本的要求,提出采用片上系统(SoC)技术完成星载微型GNSS接收机的设计。在该设计中,基带信号的捕获、跟踪与定位解算等全部在SoC内完成,具有集成度高与系统灵活性高等优势。
2018-02-07 16:18:281776 
作为雷达系统的重要组成,传统的天气雷达接收机主要采用瞬时自动增益控制扩展动态范围,利用模拟I、Q解调器对信号进行模拟解调,对接收机硬件依赖性强,信号适应能力差,而软件无线电技术的出现导致了无线电接收机的革新。
2018-05-23 14:38:006727 
本文档的主要内容详细介绍的是GNSS接收机管理软件V1.4.0应用程序免费下载。
2018-09-18 17:48:503 本文介绍的调频接收机利用超再生调频接收原理,因采用了高增益微型集成电路,故电路简单新颖。接收效果达到一般调频接收机的水平,同时克服了超再生接收机选择性差、噪声大等缺点,又保持了灵敏度高、耗电少、线路简单和成本低(元件费用不足5元)等优点。适合电子爱好者制作。
2018-09-27 11:54:0016265 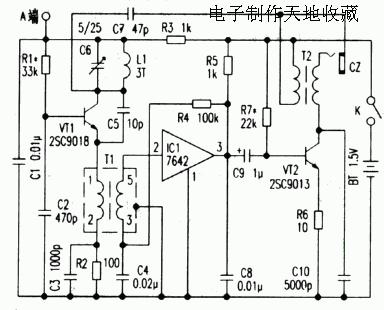
关键词:u-blox7 , GNSS接收机 , M2M , u-blox , GPS 2012-10-12 16:28:54 上传 下载附件 (30.54 KB) 2012年10月11日, 中国北京
2018-11-28 22:27:02298 专家面对面石家庄站-秦宇-RF接收机设计及发展前瞻(4)
2019-08-07 06:19:001446 专家面对面石家庄站-秦宇-RF接收机设计及发展前瞻(3)
2019-08-07 06:18:001513 专家面对面石家庄站-秦宇-RF接收机设计及发展前瞻(2)
2019-08-07 06:10:002218 专家面对面石家庄站-秦宇-RF接收机设计及发展前瞻(1)
2019-08-07 06:07:001943 AT6558R 是一款高性能 BDS/GNSS 多模卫星导航接收机 SOC 单芯片,片上集成射频前端,数字基带处理器,32 位的 RISC CPU,电源管理功能。芯片支持多种卫星导航系统,包括中国的北斗卫星导航系统 BDS,美国的 GPS,俄罗斯的 GLONASS,并实现多系统联合定位。
2019-05-27 08:00:0015 产品介绍 G950是合众思壮基于Android平台开发的一款高精度小型化GNSS接收机,搭载骁龙4核处理器,内置大容量电 池,支持45瓦PD快充,兼容4G全网通网络,上网快、不挑卡。 产品特点
2020-04-28 11:42:011271 。所以,在原有的单模接收机的基础 上研发更高精度、更加稳定耐用的双模接收机成为研究的核心。本文提出了一种GPS/Galileo双频双模接收机射频前端系统的设计方案,该方案结合现有资源,展示出了该种接收机设计的实例。重点分析了混频部分、本振部分及控制部分的功能及实现。最后利用
2020-09-17 10:45:003 以分为硬件接收机和软件接收机。GPS接收机在设计时会根据不同的使用目标选择不同的设计方案,GPS软件接收机的解决方案具有可配置性,根据不同的应用环境配置不同的解决算法。本文对基于FPGA-DSP平台的C/A码单频GPS软件接收机的算法设计进行研究。
2020-08-14 17:00:381710 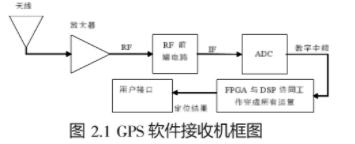
一种WiMax双下变频IF采样接收机设计方案
2021-03-19 11:16:216 AT6558 是一款高性能BDS/GNSS 多模卫星导航接收机SOC 单芯片,片上集成射频前端,数字基带处理器,32 位的RISC CPU,电源管理功能。
2021-03-31 16:52:0331 单片机设计方案简介(stc单片机)-该文档为单片机设计方案简介资料,讲解的还不错,感兴趣的可以下载看看…………………………
2021-07-22 15:51:0110 MAX2769C 的 IF 滤波器可调频率使设计人员不仅可以访问天空中的一个,还可以访问所有四个星座。MAX2769C GNSS 接收器可以灵活地接收来自 GPS、GLONASS、Galileo 和北斗卫星系统的信号,同时提供高水平的集成性能。
2022-06-24 10:18:161425 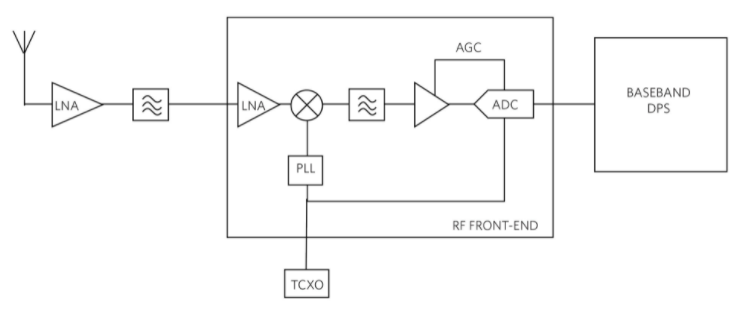
(BD-RAGG)款GNSS接收机举例。功能主要是针对地表位移监测和各建筑结构物的形变监测,包括各类边坡、水库大坝以及尾矿库。
2022-11-29 15:45:521621 全球导航卫星系统 (GNSS) 接收器处理卫星信号以计算位置、速度和时间。这些接收器提供广泛的导航解决方案,从船舶和航空电子设备到车载和静态摄像头系统(图 1)。
2022-12-01 14:04:09714 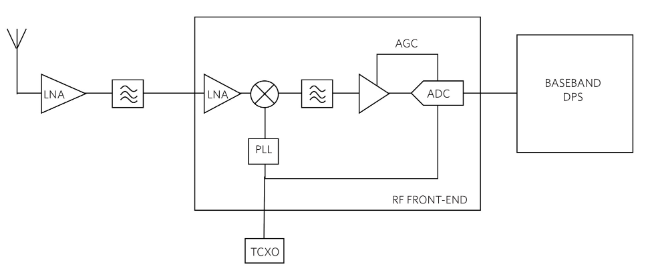
许多元素确保对GNSS有“良好的阅读” 传入的卫星信号。GNSS 接收器必须接受并且 将卫星的小模拟信号充分调节到 有用的数字输出。此设计解决方案描述了一个 接收信号的集成接收器前端解决方案 来自
2022-12-22 14:43:491433 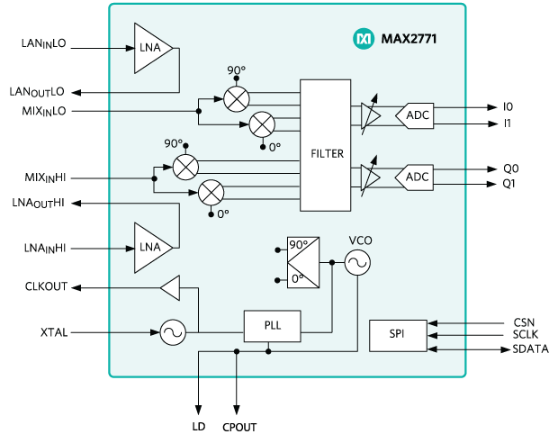
如果长期不用GNSS接收机,那么一定要把电池拿出来,并且妥善保管。RTK仪器要放在仪器箱,不能和其他杂物对方在仪器,避免仪器受损。
2023-01-13 15:12:471243 GNSS接收机、数据采集模块、无线传输模块等网络技术集成在一体的先进监测专用接收机
2023-02-28 09:33:19435 BT-641G RTK GNSS接收机数据手册
2023-04-25 09:18:472 GNSS接收机是工程检测中常见的一类仪器,其主要功能是监测各类结构物的水平和垂直位移。一个仪器之所以能同时监测两个方向的位移量,其根本原因在于采用了GNSS定位技术。接下来和北斗一起了解GNSS
2022-11-30 09:55:251299 
GNSS接收机是一种精密仪器,因为它经常要在室外工作,需要受到日晒雨淋。所以平时一定要注意维护保养,这样才能够让设备使用更长时间,下面这几点维护保养方法是非常好用的,大家可以借鉴。*1GNSS接收机
2022-12-15 09:40:151024 GNSS接收机、数据采集模块、无线传输模块等网络技术集成在一体的先进监测专用接收机,该产品以低功耗概率设计,配合200AH太阳能蓄电池在无日照的情况下,可以连续正常工作不少于30天。同时,整套系统
2023-02-22 10:42:15567 计讯物联GNSS接收机TN531,毫米级高精度监测、一体化设计高防护等级IP68,多星多频支持北斗/GPS/GAL/GLONASS,适用于地质灾害,矿山边坡,水利大坝,尾矿库等变形监测、科学研究
2023-03-14 17:15:47929 
雷达接收机的性能影响着整个无线电通信系统的性能,由于现在电子设备的不断增多,电磁环境日益错综复杂,相互干扰十分严重,使得接收机接收到越来越多的干扰信号,所以对接收机接收信号的能力要求越来越高,如何提高其灵敏度以及改善其选择性,成为无线电通信系统设计中越来越重要的方面。
2023-08-01 09:46:21261 
RTK接收机是一款通过无线通信设备接收单基站或者网络 RTK 播发的北斗/GNSS 载波相位实时动态差分数据,自主进行实时解算,提供高精度定位结果的终端设备。本文介绍了一款基于国产A40i设计RTK接收机的应用方案
2021-10-28 10:33:05532 
电子发烧友网站提供《基于ARM核的双芯片GPs接收机的硬件设计方案.pdf》资料免费下载
2023-10-18 09:25:190 电子发烧友网站提供《GLONASS接收机的方案设计.pdf》资料免费下载
2023-10-19 10:25:340 电子发烧友网站提供《基于CY7C68013A芯片的CMMB网络测试接收机的设计方案.pdf》资料免费下载
2023-10-23 10:13:472 电子发烧友网站提供《基于CBOC信号的导航接收机设计与实现.pdf》资料免费下载
2023-10-23 10:06:500 电子发烧友网站提供《中频接收机硬件平台的设计方案.pdf》资料免费下载
2023-10-27 10:43:280 GNSS接收机是什么?怎么分类的? GNSS接收机是一种用于接收全球定位系统(GNSS)信号并提供位置信息的设备。GNSS接收机使用来自全球卫星导航系统(GPS)、俄罗斯的格洛纳斯系统、欧洲伽利略
2023-10-30 11:01:061390 电子发烧友网站提供《微型GPS接收机的设计.pdf》资料免费下载
2023-11-07 10:31:443 高精度GNSS接收机在尾矿库监测中广泛应用,它能够提供位移精确测量,以及全面而详细多维度的数据监测。通过与其他监测设备的联动,可以实现了对尾矿库坝体位移、变形、坝体浸润线、库内水位、库区降雨量、安全
2024-02-01 13:54:24101 
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论