描述该参考设计使用 ISO35T 隔离式 RS-485 收发器和 TPS76333 高精度线性稳压器,提供隔离式 1-Mbps、3.3V 至 3.3V RS-485 接口。该电路板可接收信号并进
2022-09-22 09:14:57
什么是CAN (Control Area Network) 控制器局域网络
2020-11-05 06:29:51
一、CAN控制器CAN控制器用于将欲收发的消息(报文),转换为符合CAN规范的CAN帧,通过CAN收发器,在CAN-bus上交换信息。CAN控制器分类CAN控制器芯片分为两类:独立的控制器芯片,如
2022-02-07 08:23:01
CAN(Controller Area Network)控制器局域网络,CAN网络在早期的整车应用中以BCM(车身控制器)为控制中心,主要是车身零部件(雨刮/大灯/车窗…),智能硬件较少,所以早期
2021-07-12 06:28:44
CAN在汽车电子中的应用是什么?CAN控制器的错误怎么检测?
2021-05-18 06:39:52
。本文讨论这些微处理器与CAN控制器的接口问题,重点介绍CAN控制器与TMS320系列DSP的接口方法和接口电路。 1 CAN控制器的接口信号和时序CAN控制器(以PCX82C200或SJA1000为例
2018-12-03 15:22:37
Area Network)即控制器局域网,是一种能够实现分布式实时控制的串行通信网络。想到CAN就要想到德国的Bosch公司,因为CAN就是这个公司开发的(和Intel)。CAN有很多优秀的特点,使得它能够被广泛的应用。比如:传输速度最高到1Mbps,通信距离最远到10km...
2021-12-08 08:11:41
1、简介 CAN是控制器局域网络(Controller Area Network, CAN)的简称,是一种能够实现分布式实时控制的串行通信网络。 优点: 传输速度最高到1Mbps,通信距离最远到
2022-01-12 06:08:19
什么是CAN?控制器局域网(CAN)是一种串行通信总线,旨在在恶劣的环境下,尤其是工业和汽车应用中实现强大而灵活的性能。CAN最初由Bosch发明,后来被编入ISO11898-1标准,CAN定义了
2020-09-30 17:45:10
如何计算控制器参数使隔离式CAN(控制器区域网络)网络以1 Mbps的速度运行
2019-06-11 16:43:46
ADM3053 隔离式CAN收发器带隔离电源ADM3053是一款隔离式控制器区域网络(CAN)物理层收发器,集成隔离DC/DC转换器,符合ISO 11898标准。该器件采用ADI公司
2018-11-05 09:20:53
将高性能、低功耗的ARM微控制器与目前新兴的ISM波段短距离无线通信技术和各种新兴的无线网络技术相结合,将是未来嵌入式设计的一个“热点”。本书以ARM9微控制器为基础,分别介绍ARM9的基础实战
2011-03-04 17:19:20
描述BACnet协议的体系结构,分析BACnet控制器的功能,论证基于嵌入式Linux开发BACnet控制器的可行性;给出BACnet控制器软件的体系结构及其软件设计。嵌入式Linux 体系结构BACnet协议是一种为楼宇自动控制网络所制定的数据通信协议。
2019-09-20 08:07:27
DP1040C是一款应用于 CAN 协议控制器和物理总线之间的接口芯片,可应用于卡车、公交、小汽车、工业控制等领域,速率可达到 1Mbps,具有在总线与 CAN 协议控制器之间进行差分信号传输的能力
2020-10-28 17:02:41
FAULHABER推出用于扁平电机的内置速度控制器
2021-02-05 06:54:34
串口、以太网、无线网络等方式与其他设备进行数据交换和通信。 嵌入式系统:MCU控制器可以用于构建嵌入式系统,例如安防系统、智能家居系统、医疗设备等,实现各种智能控制和数据处理功能。 物联网设备
2023-05-05 14:59:21
PID控制器是什么?PID的控制规律是什么?PID控制器各校正环节的作用有哪些?增量式PID和位置式PID特点是什么?
2021-07-13 07:16:36
目录:一、CAN通信原理1.CAN通信简介2.CAN通信优点3.CAN总线物理层4.CAN报文种类5.数据帧格式6.仲裁过程7.位同步二、STM32的CAN控制器1.功能特点2.STM32CAN架构
2021-08-19 06:34:16
的报文。它也支持报文发送的优先级要求(优先级特性可软件配置)。对于安全紧要的应用, bxCAN提供所有支持时间触发通信模式所需的硬件功能。STM32至少配备一个bxCAN控制器,它具有如下几个特点:支持CAN协议2.0A和2.0B主动模式波特率最高可达1Mbps支持时间触发通信功能11位的标准
2021-08-19 07:01:08
DP1040T一款应用于CAN协议控制器和物理总线之间的接口芯片,可应用于卡车、公交、小汽车、工业控制等领域,速率可达到1Mbps,具有在总线与CAN协议控制器之间进行差分信号传输的能力。特点
2023-03-23 10:14:58
VISION控制器标定及网络分析工具
2021-01-19 07:25:37
我正在使用XMC4108控制器来测试CAN通信。 我将CAN配置为1mbps的速度。 我正在使用 PCAN 测试传输和接收。 传输工作正常。
CAN
2024-01-25 07:46:55
● 超低功耗: 1.2mA/通道(1Mbps 时)功耗更低,电路简单、稳定性更高● 高速率: 25Mbps,传输速度快,脉宽失真小,低延时,性能优越● 节省PCB面积,结构简单,方案更加灵活● 电路
2021-11-04 16:30:06
概述CA-IS306X是一款具有集成式高效电源转换器的隔离式控制区域网络(CAN)物理层收发器,符合ISO11898-2标准的技术规范。此器件采用片上二氧化硅(SiO2)电容作为隔离层,在CAN协议
2021-10-19 15:59:21
为什么用PLC控制伺服控制器一给使能电机就转(此时PLC还没运行呢),控制器和电机都已经测试好了
2023-12-11 07:00:33
什么是系统基础芯片(SBC)?SBC是纯粹的集成电路,它将控制器局域网络(CAN)或本地互联网络(LIN)收发器与内部/外部“功率器件”集成在一起。该功率器件可以是低压差线性稳压器(LDO)、DC/DC转换器或两者兼有。
2019-09-11 11:51:17
®微处理器,内置CAN控制器。采 用典型系统时钟(fsclk)值,TQ整数值以粗体显示(用于1 Mbps 的有效时钟/BRP组合)。 表1. 用于1 Mbps的时钟和BRP组合第2步:位段配置下一步
2018-10-16 17:00:07
是固定的,因此加入隔离可能会缩短最大电缆距离。
图2. 存在传播延迟时的仲裁传播延迟补偿
为了补偿隔离引起的传播延迟,可调节特定的CAN控制器参数。首先为CAN控制器时钟设置波特率预分频器(BRP
2018-10-22 16:40:46
■内置单轴控制器,节省上位控制器的脉冲输出点数■可配置16段路径程序,支持回零/速度/位置/JOG等功能■隔离型RS485总线,支持多达31轴的RS485从站网络■7路数字量输入,支持原点、限位、急
2021-09-01 08:19:59
的节点链表。网关功能嵌入式应用中通常有多个CAN网络,以适合该应用的不同速度运行。有些报文需要从一个总线系统传输到另一个总线系统。网关功能对实现上述应用非常有效,而且还有可能将网关和FIFO功能
2018-12-07 10:09:17
本帖最后由 welsonwxp 于 2021-1-4 09:32 编辑
CA-IS3062是一款隔离式控制区域网络(CAN)物理层收发器,同时内部集成隔离式DC-DC转换器。符合
2021-01-04 09:28:50
你好,我正在为PMSM设计控制器,我有一个问题,在长时间运行期间,控制器如何适应PMSM的电机参数变化?
2024-01-22 06:35:44
嵌入式领域。3. 1 uClinux在控制器中的系统定制Linux内核采用模块化的设计,即有很多功能可以独立地加上或卸下,在本控制器的要求中突出表现为对网络服务器功能的实现,故对Linux内核重新
2016-01-16 08:50:10
运动控制技术是制造自动化的关键基础,其水平高低是衡量一个国家工业现代化的重要标志,研究和开发具有开放式结构的运动控制器是当前运动控制领域的一个重要发展方向。随着集成电路技术、微电子技术、计算
2019-09-04 07:10:42
运动控制技术是制造自动化的关键基础,其水平高低是衡量一个国家工业现代化的重要标志,研究和开发具有开放式结构的运动控制器是当前运动控制领域的一个重要发展方向。随着集成电路技术、微电子技术、计算
2019-08-30 08:27:17
BACnet网络体系结构和控制器功能是什么基于嵌入式Linux开发软件的可行性BACnet控制器软件怎么实现?
2021-04-28 06:23:04
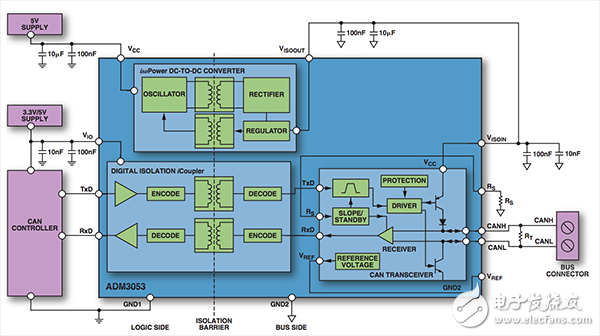
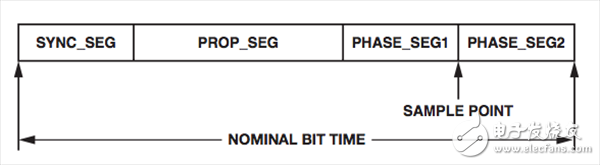
的隔离式 CAN 节点,我们将以它为例来计算所需的 CAN控制器参数,以便在 20 米电缆上以 1 Mbps 的速度进行通信。一个 CAN 比特由四个独立的时间段组成 :同步段 (SYNC_SEG
2018-10-15 10:35:50
我如何计算微控制器的速度,它可以使用 SDIO 1 位和 SPI 加载数据的速度是多少?我可以使用 SPI 将数据加载到存储卡中吗?如果是,我是否必须使用 FATFS 库来加载?我有使用 SDIO
2022-12-28 13:12:42
单片机与嵌入式系统 重庆通信学院陈大亮 刘鹏 苏丹引 言运动控制器是运动控制系统的核心部件。目前,国内的运动控制器大致可以分为3类:第1类是以单片机等微处理器作为控制核心的运动控制器。这类运动控制器
2019-07-31 07:52:19
由于时变非线性和强耦合的控制系统还没有精确的数学模型,因而传统的依赖被控对象数学模型的控制策略及其控制系统的封闭式结构很难对其实施有效控制。神经网络控制能够很好地克服系统中模型参数的变化和非线性等
2019-08-12 06:25:35
一种基于Internet的智能家庭网络控制器的设计与实现
2021-06-04 06:39:09
请问,如何将数字电位器与微控制器隔离控制,我想用数字电位器控制外部设备。
2023-12-12 08:12:01
本文设计的基于CPLD的双CAN控制器已运用于实际应用中,电池管理系统运行可靠,CAN报文收发平稳,完全适合混合动力汽车的使用。
2021-05-06 06:51:07
控制局域网(CAN)属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通信网络。与一般的通信总线相比,CAN总线的数据通信可靠性、实时性和灵活性好,应用领域非常广泛,通常基于ARM或51单片机,实现与CAN控制器的通信联络。
2019-10-18 07:30:54
表贴式永磁同步电机FOC矢量控制中电流环PI控制器参数的调试过程是怎样的?
2021-09-23 06:35:41
本文将给出一种采用通用微控制器(MCU)和独立CAN控制器和收发器为核心的智能节点,完成与汽车系统之间的通信和控制由数字信号处理器DSP2407为控制芯片的直流变转速空调控制器的运行,并且整个空调系统已成功地运行在以燃料电池为动力的试验汽车当中。
2021-05-17 07:00:29
客车网络控制中CAN/CAN网桥设计摘要: 本文以LPC2119 微控制器为核心设计了客车网络控制中CAN/CAN 网桥, 实现了不同CAN 网段连接、报文过滤和转发功能。文中分析和阐述了该网桥
2009-12-01 10:29:53
今后基于计算机标准总线的运动控制器仍然是市场的主流,但是,基于网络的嵌入式运动控制器会有较大的发展。基于计算机标准总线的通用运动控制器主要是板卡结构,采用的总线大都为ISA、PCI。由于它们的应用依附于通用PC 计算机平台,从工业控制的角度分析,这种运动控制器的优缺点如下:
2019-07-23 06:46:17
CA-IS3062W集成隔离电源的隔离式CAN收发器概述CA-IS306X是一款具有集成式高效电源转换器的隔离式控制区域网络(CAN)物理层收发器,符合ISO11898-2标准的技术规范。此器件采用
2021-12-08 10:27:04
微控制器广泛应用于各种小型电器,随着技术的发展,其不但价格低廉,而且功能越来越强大。由于家用电器、手持式消费电子产品、手持式通信装置和车用电子等领域的市场推动,微控制器的使用量越来越大而且表现出
2019-06-25 06:19:25
CAN协议具有哪些特点?CAN协议的网络拓扑结构是如何构成的?怎样去使用STM32F1的CAN控制器呢?
2021-11-01 07:19:11
您好,我想通过CAN(控制器局域网)更新固件I/F.我找不到“1388”,这是可能的吗?提前感谢。 以上来自于百度翻译 以下为原文 Hello, I want to update a
2019-02-22 07:34:56
求一个基于BP神经网络PID控制器应用于双闭环直流调速系统BP_PID控制器学习参数怎么设置?
2021-10-13 08:10:12
本帖最后由 ZoeWong 于 2014-6-19 23:46 编辑
各位大侠,刚接触CAN的小白,能否给科普一下几个问题:1、CAN信号通过双绞线传递,上面挂同样具有双绞线的各控制器,那具
2014-06-19 23:38:44
控制器有两种唤醒方式,一个是硬线唤醒,通过IGN线实现对控制器的上电;另一种是通过接收CAN信号来实现对控制器上电。请问这两种方式的优劣?不胜感激!
2018-10-11 14:43:32
我国的汽车CAN总线技术起步较晚,但随着现代汽车电子的不断进步发展,其研究和应用正如火如荼的进行中。CAN总线是一种串行多主站控制器局域网总线,是一种有效支持分布式控制或实时控制的串性通讯网络
2015-08-18 14:10:28
请点击彩色方框查看或申请推荐的解决方案。 德州仪器 (TI) 的汽车车身控制器解决方案设计注意事项:汽车车身控制器用于监视和控制与车身(例如车灯、车窗、门锁)相关的功能并像 CAN 和 LIN 网络
2012-12-10 10:15:50
高速CAN有哪些主要应用?怎样去设计STM32F103 CAN控制器的硬件部分?怎样去设计STM32F103 CAN控制器的软件部分?
2021-10-27 07:50:28
大家都使用什么型号的can控制器独立can控制器除了nxp和microchip两家,还有谁生产吗?与2440配合使用有没有什么较好的方案
2013-06-21 10:52:44
描述这是一块用于对 TDA 1085 芯片上的 Optima 速度控制器进行电流隔离的电路板。它允许您从 220 伏交流网络中断开变速控制电位器的电流PCB+展示
2022-08-18 07:34:18
本帖最后由 cmbd 于 2022-2-17 11:22 编辑
想写一个上位机软件来监视及控制电机控制器的启动、停止,及相关参数写入和读取,但拿到这个通讯协议,竞然完全看不懂,望各位指教,谢谢!附件为通讯协议。比如我想对控制器写入电机正转(前进模式),我该发送什么样的报文给控制器呢?
2016-12-26 22:02:14
电流环控制器的参数该怎样去设计?转速环控制器的参数该怎样去设计?
2021-10-14 08:48:02
网关控制器是整车电子电气架构中的核心部件,其作为整车网络的数据交互枢纽,可将 CAN、LIN、MOST、FlexRay、Ethernet 等网络数据在不同网络中进行路由。此外,由于独立网关控制器
2020-12-21 06:23:21
提问:如何计算控制器参数使隔离式CAN(控制器区域网络)网络以1Mbps的速度运行?请看博主安利的一种计算方法吧,当然新技能一定要转发哦~答:CAN是一种差分信号标准,用于不同系统之间的串行通信
2018-10-26 11:46:37
使用重新配置的反馈网络后,调整ADP1051输出电压的计算结果: (a)向下调整 (b)向上调整通过计算可以验证这种重新配置反馈网络以调整输出电压的方法,并为其它使用数字基准电压的数字电源控制器——比如
2018-11-30 16:48:56
本帖最后由 一只耳朵怪 于 2018-6-6 16:28 编辑
15.4stack最高速率只可以跑到200Kbps,请问4Mbps和1Mbps的速率下应该跑什么协议栈和网络层
2018-06-06 12:04:22
跪求!!求基于LabVIEW步进电机PID速度控制器的设计
2015-04-21 15:52:00
一.CAN简介 CAN是控制器局域网络(Controller Area Network, CAN)的简称,是由以研发和生产汽车电子产品著称的德国BOSCH公司开发的,是国际上应用最广泛的现场总线
2016-07-06 16:53:07
运动控制器控制伺服电机的指令方式运动控制器以模拟量信号控制伺服电机的调试步骤
2021-01-21 07:15:51
和灵活性,可实时完成运动控制过程中复杂的逻辑处理和控制算法,能实现多轴高速高精度的伺服控制。本文选用DSP与FPGA作为运动控制器的核心部件,设计了通用型运动控制器。其中DSP用于运动轨迹规划、速度控制
2019-07-31 08:15:26
运动控制器是运动控制系统的核心部件。目前,国内的运动控制器大致可以分为3类:第1类是以单片机等微处理器作为控制核心的运动控制器。这类运动控制器速度较慢、精度不高、成本相对较低,只能在一些低速运行和对轨迹要求不高的轮廓运动控制场合应用。
2019-10-16 06:22:14
运动控制器的类型 1、是以单片机等微处理器作为控制核心的运动控制器。这类运动控制器速度较慢、精度不高、成本相对较低,只能在一些低速运行和对轨迹要求不高的轮廓运动控制场合应用。 2、是以专用芯片
2019-12-10 10:41:31
随着目前越来越多的系统在不同电压下运行,从电梯到电动汽车,甚至海事系统,隔离式CAN收发器已经成为不可或缺的一部分。这些收发器将CAN(控制器区域网络)标准的优先和仲裁功能合二为一,并提供隔离的优势(断开接地环路、耐压力差、共模瞬变抗扰度等),有助于保持系统中两个电压域之间的可靠通信。
2019-07-31 07:11:00
CAN控制器模块世界向着网络化方向发展,测控系统也不例外。CAN总线的出现,使控制系统的网络化成为可能,是国际公认的一种现场总线协议。CAN (Controller Area Network)总
2009-09-21 08:39:15 12
12 带CAN 控制器的单片8 位微控制器
2017-09-22 10:06:578 。 隔离式CAN网络的传播延迟比非隔离式CAN网络要长,设计起来可能颇具挑战性。图1显示一个使用信号和电源隔离CAN收发器ADM3053的隔离式CAN节点,我们将以它为例来计算所需的CAN控制器参数,以便在20米电缆上以1 Mbps的速度进行通信。 一个
2017-11-16 17:37:106 增强控制器区域网络(eCAN)在C28x™DSP实现的模块是一个完整的CAN控制器与CAN 2.0B协议兼容。
2018-04-12 16:51:164 这个应用报告描述了一个配置CAN 节点以及在网络上执行CAN 通信的典型步骤。
控制器局域网是一个串行多主控通信协议, 此协议高效支持分布式实时控制,具有高级安全级别,和一个高达1Mbps 的通信速率。CAN 总线是嘈杂和恶劣的环境,诸如汽车和其他要求可靠通信的工业领域应用的理想选择。
2018-04-16 17:48:192 TI公司的CAN4550-Q1是集成了收发器的汽车控制器局域网络(CAN)灵活数据速率(FD)控制器,支持数据速率高达标8Mbps,满足ISO11898-1:2015高速CAN数据链接层的指标,满足ISO11898–2:2016高速CAN指标
2019-08-04 10:37:26 4156
4156 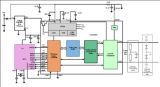
控制器局域网是连接设备、系统传感器的微型控制器的串行总线网络。CAN主要用于汽车等低半径区域的不同设备之间的通信。
2021-06-17 17:34:422569 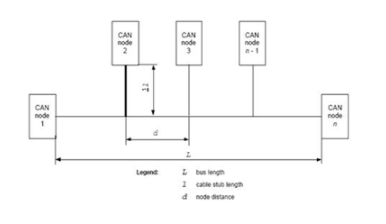
一、CAN控制器CAN控制器用于将欲收发的消息(报文),转换为符合CAN规范的CAN帧,通过CAN收发器,在CAN-bus上交换信息。CAN控制器分类CAN控制器芯片分为两类:独立的控制器芯片
2021-12-04 11:21:0927 CAN是一种广泛用于汽车的差分信号标准, 工业和仪器仪表行业。它用于串行通信 在可以连接到不同电源系统的系统之间,通常 长距离。由于这些环境,电流隔离通常是 用于断开接地回路或提供人身安全。
2023-01-29 09:58:181028 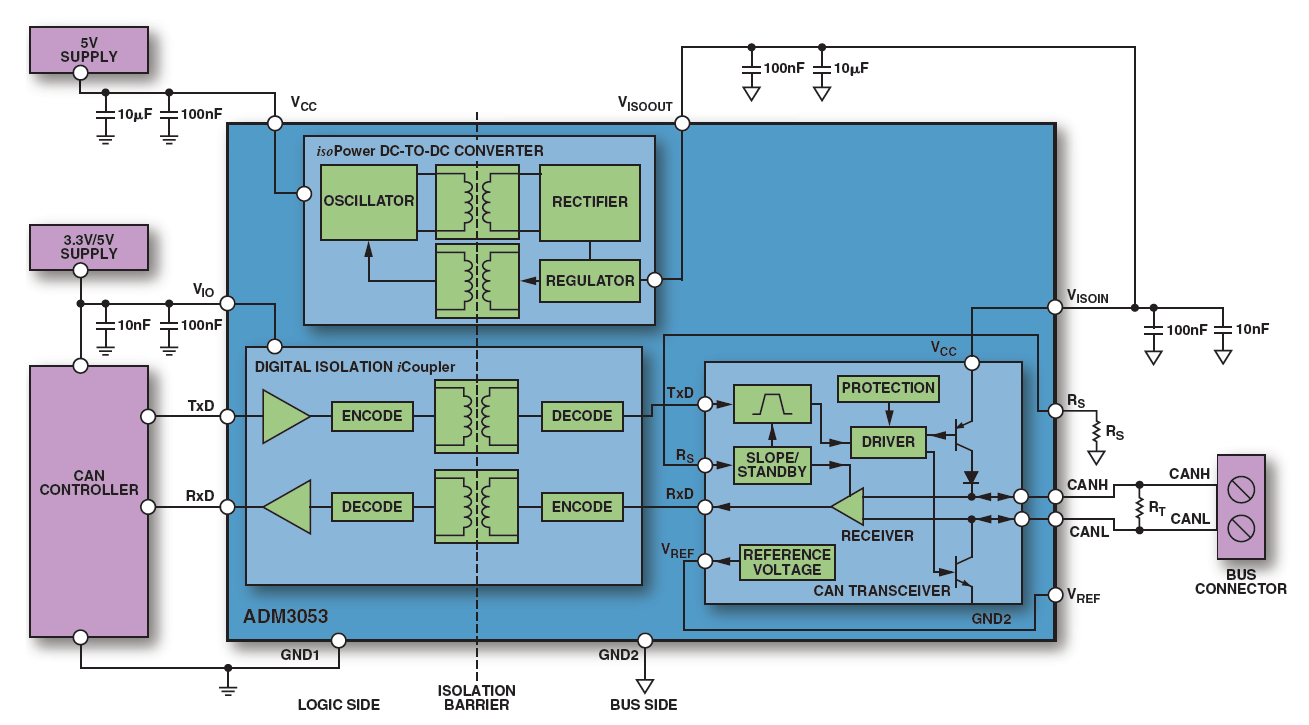
DP1050是一款应用于 CAN 协议控制器和物理总线之间的接口芯片,可应用于卡车、公交、小汽车、工业控制等领域,速率可达到 1Mbps,具有在总线与 CAN 协议控制器之间进行差分信号传输的能力,完全兼容“ISO 11898”标准。
DP1050芯片特点
2023-02-25 20:47:211501 
CAN是一种广泛用于汽车的差分信号标准, 工业和仪器仪表行业。它用于串行通信 在可以连接到不同电源系统的系统之间,通常 长距离。由于这些环境,电流隔离通常是 用于断开接地回路或提供人身安全。
2023-04-04 11:28:32586 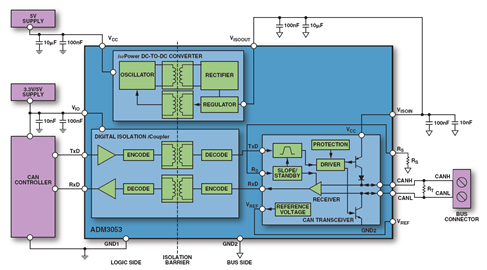
电子发烧友网站提供《基于Zigbee无线传感器网络的路灯区域控制器设计.pdf》资料免费下载
2023-11-06 17:06:160 为何CAN总线最高速度只能到1Mbps? CAN总线是一种使用在工业控制和汽车领域的通信协议,它的最高传输速率限制在1Mbps。CAN总线的速度限制起源于其设计的目的和技术特点。下面将详细探讨CAN
2024-01-31 14:08:55312 设计、生产商用车车身网络控制器的供应商,推出分布式网络控制方案,实现整车的灯光、雨刮、门窗等电气控制。整套产品目前已经随整车出口到欧洲、中东地区,现已为一汽解放、中国重
2021-08-13 15:02:34
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论