 电子发烧友App
电子发烧友App


这次学习STM32花了很长时间,一个礼拜多,也有颇多收获,学习过程也有颇多曲折。这次的任务是:用STM32的一个定时器在四个通道上产生四路频率可调占空比可调的PWM波。
看到这个题,我先看STM32的数据手册,把STM32的定时器手册看完就花了一天,但是看了一遍任然不知道所云,就看库函数,略有点理解,就想一哈把这个程序调出来,于是就花了一天多时间仿照网上别人的程序来写,花了一天多写出来调试,结果行不通,做了无用功,于是静下心来想想,还是一步一步的来。
我先用STM32的通用定时器用PWM模式产生四路相同占空比,不同频率的PWM波,配置如下:
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//使能TIM2时钟
TIM_InternalClockConfig(TIM2);//使用内部时钟
TIM_BaseInitStructure.TIM_Prescaler=3; //设置TIM时钟频率除数的预分频值
TIM_BaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;//选择计数器模式
TIM_BaseInitStructure.TIM_Period=1799;//设置下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_BaseInitStructure.TIM_ClockDivision=0;//设置时钟分割
TIM_TimeBaseInit(TIM2,&TIM_BaseInitStructure);
//通道1
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;//选择定时器模式
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;//选择输出比较状态
TIM_OCInitStructure.TIM_OutputNState=TIM_OutputNState_Disable;//选择互补输出比较状态
TIM_OCInitStructure.TIM_Pulse=CCR1_Val;//设置了待装入捕获比较器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;//设置输出极性
TIM_OCInitStructure.TIM_OCNPolarity=TIM_OCNPolarity_Low;//设置互补输出极性
TIM_OCInitStructure.TIM_OCIdleState=TIM_OCIdleState_Set;//选择空闲状态下得非工作状态
TIM_OCInitStructure.TIM_OCNIdleState=TIM_OCNIdleState_Reset;//选择互补空闲状态下得非工作状态
TIM_OC1Init(TIM2,&TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Enable);
//通道2
TIM_OCInitStructure.TIM_Pulse=CCR2_Val;//设置了待装入捕获比较器的脉冲值
TIM_OC2Init(TIM2,&TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM2,TIM_OCPreload_Enable);
//通道3
TIM_OCInitStructure.TIM_Pulse=CCR3_Val;//设置了待装入捕获比较器的脉冲值
TIM_OC3Init(TIM2,&TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM2,TIM_OCPreload_Enable);
//通道4
TIM_OCInitStructure.TIM_Pulse=CCR4_Val;//设置了待装入捕获比较器的脉冲值
TIM_OC4Init(TIM2,&TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM2,TIM_OCPreload_Enable);
TIM_Cmd(TIM2, ENABLE);
TIM_CtrlPWMOutputs(TIM2,ENABLE);
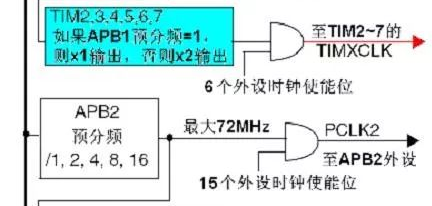
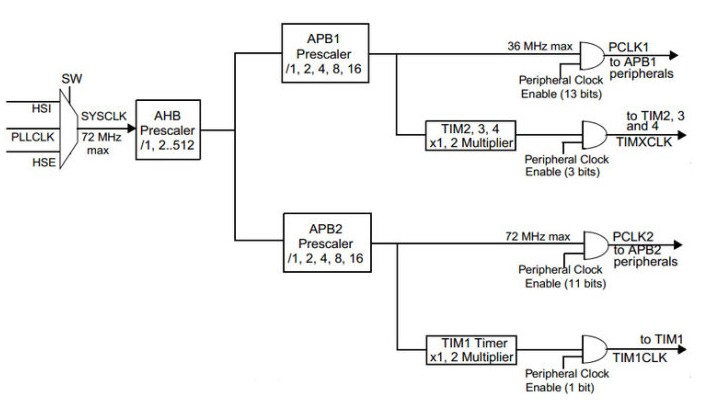
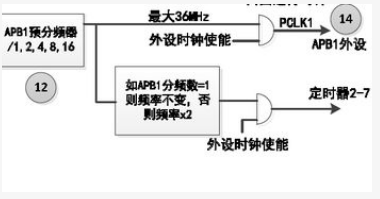
用pwm模式输出的频率和占空比是固定的,不可调,要想输出频率可调,占空比可调,必须得使用比较输出模式。这点资料是在STM32全国巡回研讨会上看到的,如图:
所以,接下来我就写了一个程序通过输出比较模式产生一路PWM波,这个波的频率和占空比都由自己确定,函数配置如下:
TIM_BaseInitStructure.TIM_Prescaler=3; //设置TIM时钟频率除数的预分频值(18M)
TIM_BaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;//选择计数器模式
TIM_BaseInitStructure.TIM_Period=1800;//设置下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_BaseInitStructure.TIM_ClockDivision=0;//设置时钟分割
TIM_TimeBaseInit(TIM2,&TIM_BaseInitStructure);
//通道1
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_Toggle;//选择定时器模式
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;//选择输出比较状态
TIM_OCInitStructure.TIM_OutputNState=TIM_OutputNState_Disable;//选择互补输出比较状态
TIM_OCInitStructure.TIM_Pulse=CCR1_Val1;//设置了待装入捕获比较器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;//设置输出极性
TIM_OCInitStructure.TIM_OCNPolarity=TIM_OCNPolarity_Low;//设置互补输出极性
TIM_OCInitStructure.TIM_OCIdleState=TIM_OCIdleState_Set;//选择空闲状态下得非工作状态
TIM_OCInitStructure.TIM_OCNIdleState=TIM_OCNIdleState_Reset;//选择互补空闲状态下得非工作状态
TIM_OC1Init(TIM2,&TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Disable);
TIM_ARRPreloadConfig(TIM2,ENABLE);
TIM_ITConfig(TIM2,TIM_IT_CC1,ENABLE);
TIM_Cmd(TIM2,ENABLE);
}
void TIM2_IRQHandler(void)
{
TIM_ClearITPendingBit(TIM2,TIM_IT_CC1);
if(n==1)
{
n=0;
TIM_SetCompare1(TIM2,CCR1_Val2);
}
else
{
n=1;
TIM_SetCompare1(TIM2,CCR1_Val1);
}
}
通过改变比较寄存器(CCR1)中的值,改变PWM的占空比,在每次匹配中断中改变CCR1的值。上面程序实现的是产生一路频率为10K占空比为40%的PWM波。
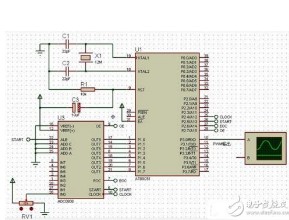
有了上面的思想我就想产生四路不同频率不同占空比的PWM波,经过反复思考光配函数似乎不能实现,在网上去查了的,很多网友也说不能实现,有一个网友给了一个提示:软件模拟。刚开始没明白什么意思,于是还是自己继续配置库函数,在这个过程中一直有两个疑问:
每次中断中,CCR寄存器的值都在循环的增加,CCR的寄存器不可能是无限大吧?就算是无限大,计数器也不是无限大呀,他只能记到65535。初步确定使用匹配中断不行,我有想过同时使用溢出中断和匹配中断,但这样四路PWM波只能是固定的,频率和占空比不能调。大概说一下怎样用溢出中断和匹配中断实现四路固定的PWM波,把计数器寄存器(CNT)的值装最大周期的那个PWM波,当一次计数完成算一下三路小点周期数,在匹配中断中对应的设个变量,CCR就改变几次,溢出中断来了就再次给计数器装初值,同时四个比较寄存器从装初值,这样很麻烦,理论上可以实现,但我考虑到最终不能实现我的要求,就没有去验证。所以产生四路频率可调占空比可调,用一个定时器似乎不能实现,就一直卡到这里,我又在想飞哥说能实现,就肯定能实现,我又在网上找资料,还是没找到,只是有人题四路,软模拟,于是我就思考用软模拟实现,最后在一个师兄的指点下,确实用软件模拟一个中间比较寄存器能实现,思路大概是这样子的,首先让比较寄存器装满,也就是最大值(65535),然后通过改变模拟比较寄存器的值,每次匹配中断只需把模拟比较寄存器的值去比较就行,具体方案看程序。
unsigned charCnt[4]; //一个数组,这个数组的每个元素对应一个通道,用来判断装PWM得高电平还是低电平数
unsigned intT[4];//周期数组
unsigned intR[4];//模拟的比较寄存器数组,一样的每个通道对应一个数组元素
unsigned intRh[4];//模拟的PWM高电平比较寄存器
unsigned intRl[4]; //模拟的PWM低电平比较寄存器
unsigned char F[4];//占空比数组
unsigned int CCR1,CCR2,CCR3,CCR4;
void Init(void)
{
unsigned char i = 0;
for(i = 0; i 《 4; i++)
{
Cnt[i]= 0;
T[i]= 0;
R[i]= 0;
Rh[i] = 0;
Rl[i] = 0;
F[i]= 0;
}
//t的范围为(0~65536)
T[0] = 450;//F=40K
T[1] = 600;//F=30K
T[2] = 900;//F=20K
T[3] = 1800;//F=10K
//F(占空比)的范围为(0~100)
F[0] = 40;
F[1] = 30;
F[2] = 20;
F[3] = 10;
for(i = 0; i 《 4; i++)
{
Rh[i] = (T[i] * F[i]) / 100;
Rl[i] = T[i] - Rh[i];
}
R[0] = Rl[0];
R[1] = Rl[1];
R[2] = Rl[2];
R[3] = Rl[3];
CCR1 = R[0];
CCR2 = R[1];
CCR3 = R[2];
CCR4 = R[3];
}
对应的数组初始化
void RCC_Configuration(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOD,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO,ENABLE);
}
时钟配置
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
//Key1 PA0 Key3 PA8
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0|GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_Init(GPIOA,&GPIO_InitStructure);
//Key2 PC13
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_Init(GPIOC,&GPIO_InitStructure);
//Key PD3
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_3;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_Init(GPIOD,&GPIO_InitStructure);
//TIM3 CH1 CH2
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Init(GPIOA,&GPIO_InitStructure);
//TIM3 CH3 CH4
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0|GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Init(GPIOB,&GPIO_InitStructure);
}
管脚配置
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
#ifdef VECT_TAB_RAM
NVIC_SetVectorTable(NVIC_VectTab_RAM,0x0);
#else
NVIC_SetVectorTable(NVIC_VectTab_FLASH,0x0);
#endif
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStructure.NVIC_IRQChannel=TIM3_IRQChannel;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
中断配置
void TIM_Configuration(void)
{
TIM_TimeBaseInitTypeDef TIM_BaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_InternalClockConfig(TIM3);
TIM_BaseInitStructure.TIM_Prescaler=3;//4分频,18M
TIM_BaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_BaseInitStructure.TIM_Period=65535;
TIM_BaseInitStructure.TIM_ClockDivision=0;
TIM_BaseInitStructure.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM3,&TIM_BaseInitStructure);
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_Toggle;
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse=CCR1;
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_Low;
TIM_OC1Init(TIM3,&TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM3,TIM_OCPreload_Disable);
TIM_ClearITPendingBit(TIM3,TIM_IT_CC1);
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_Toggle;
TIM_OCInitStructure.TIM_Pulse=CCR2;
TIM_OC2Init(TIM3,&TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Disable);
TIM_ClearITPendingBit(TIM3,TIM_IT_CC2);
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_Toggle;
TIM_OCInitStructure.TIM_Pulse=CCR3;
TIM_OC3Init(TIM3,&TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM3,TIM_OCPreload_Disable);
TIM_ClearITPendingBit(TIM3,TIM_IT_CC3);
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_Toggle;
TIM_OCInitStructure.TIM_Pulse=CCR4;
TIM_OC4Init(TIM3,&TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM3,TIM_OCPreload_Disable);
TIM_ClearITPendingBit(TIM3,TIM_IT_CC4);
TIM_Cmd(TIM3,ENABLE);
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE);
TIM_ITConfig(TIM3,TIM_IT_CC1|TIM_IT_CC2|TIM_IT_CC3|TIM_IT_CC4,ENABLE);
}
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_IT_CC1)!=RESET)
{
TIM_ClearITPendingBit(TIM3,TIM_IT_CC1);
Cnt[0]=(~Cnt[0])&0x01;
if(Cnt[0]==0x01)
R[0]+=Rl[0];
else
R[0] += Rh[0];
if(R[0]》65535)
R[0]=R[0]-65535;
CCR1=R[0];
TIM_SetCompare1(TIM3,CCR1);
}
if(TIM_GetITStatus(TIM3,TIM_IT_CC2)!=RESET)
{
TIM_ClearITPendingBit(TIM3,TIM_IT_CC2);
Cnt[1]=(~Cnt[1])&0x01;
if(Cnt[1]==0x01)
R[1]+=Rl[1];
else
R[1] += Rh[1];
if(R[1]》65535)
R[1]=R[1]-65535;
CCR2=R[1];
TIM_SetCompare2(TIM3,CCR2);
}
if(TIM_GetITStatus(TIM3,TIM_IT_CC3)!=RESET)
{
TIM_ClearITPendingBit(TIM3,TIM_IT_CC3);
Cnt[2]=(~Cnt[2])&0x01;
if(Cnt[2]==0x01)
R[2]+=Rl[2];
else
R[2] += Rh[2];
if(R[2]》65535)
R[2]=R[2]-65535;
CCR3=R[2];
TIM_SetCompare3(TIM3,CCR3);
}
if(TIM_GetITStatus(TIM3,TIM_IT_CC4)!=RESET)
{
TIM_ClearITPendingBit(TIM3,TIM_IT_CC4);
Cnt[3] = (~Cnt[3])&0x01;
if(Cnt[3]==0x01)
R[3]+=Rl[3];
else
R[3] += Rh[3];
if(R[3]》65535)
R[3]=R[3]-65535;
CCR4=R[3];
TIM_SetCompare4(TIM3,CCR4);
}
}
中断函数
其余就是按键扫描函数,通过改变周期数组中的值和占空比寄存器中的值就能改变PWM波的频率和占空比,当然按键可以设置为4个(一个按键对应一个通道),如果IO够用也可以设置8个,没两个按键对应一个通道分别改变频率和占空比。












 工商网监
工商网监
评论