基于Matlab和VR技术的移动机器人建模及仿真
2010-11-18 23:05:34
如今,无论是在工厂的仓库,酒店的走廊,或是家中的客厅,我们都能看到移动机器人(AGV/AMR)的身影。它们因更便宜、更安全且比真实工人更高效而受大受欢迎。 这些机器人增加了企业的灵活性,允许在一个
2023-08-25 11:09:11 958
958 
FRC5000系列叉式移动机器人控制器,适用各类常见的叉式移动机器人,内置激光导航算法,支持单舵轮、双舵轮底盘运动模型。FRC5000系列自带丰富的I/O资源和各种通讯接口,支持CANopen
2023-07-11 10:26:45
MRC3100系列AMR移动机器人控制器,适用潜伏顶升式、协作(复合)式、辊筒式等差速底盘类型移动机器人,内置激光导航及二维码导航算法,支持差速底盘运动模型。MRC3100系列自带丰富的I/O资源
2023-07-11 10:12:02
电子发烧友网站提供《如何制作Arduino智能移动机器人.zip》资料免费下载
2023-07-04 14:28:38 2
2 电子发烧友网站提供《移动机器人的构建.zip》资料免费下载
2023-07-04 11:02:132 移动机器人导航是指移动机器人确定自己在地图参考系中的位置后,自动规划出通往地图参考系中某个目标位置路径并沿着该路径到达目标位置点的能力,是移动机器人行动能力的关键。基于整个智能制造的发展,移动机器人
2023-06-21 17:29:16472 
移动机器人导航是指移动机器人确定自己在地图参考系中的位置后,自动规划出通往地图参考系中某个目标位置路径并沿着该路径到达目标位置点的能力,是移动机器人行动能力的关键。
2023-06-20 17:09:40553 
叉式移动机器人(AGV/AMR)是一种常见的移动机器人类型,它摆脱传统的人车操作,自动导航行驶,具有强大的柔性和智能性。叉式移动机器人(AGV/AMR)不同于传统叉车,它无需人工驾驶运行。具有智能化
2023-06-05 15:34:52349 
移动机器人是一个多功能于一体的综合系统,内容涵盖了传感器技术、自动化技术、信息处理、电子工程等,它集环境感知、动态决策与规划于一体,是目前科学技术发展最活跃的领域之一。移动机器人的各种组件之间需要
2023-05-24 17:01:41462 
移动机器人是一个多功能于一体的综合系统,内容涵盖了传感器技术、自动化技术、信息处理、电子工程等,它集环境感知、动态决策与规划于一体,是目前科学技术发展最活跃的领域之一。移动机器人的各种组件之间需要
2023-04-20 10:03:21473 推动中国移动机器人控制行业发展标准化、精细化,科聪面向移动机器人细分领域再推新品——AMR移动机器人控制器和叉式移动机器人控制器
2023-04-17 15:31:33198 
移动机器人应用所面临的场景非常多样,目前的自然导航技术不足以应对所有的情形,导航技术仍是移动机器人需要突破的重点。
2023-03-14 10:07:03784 移动机器人介绍:移动机器人(AutomaticMobileRobot)是一种自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,通过软件控制行动。如今,移动机器人在不同的商业领域
2023-03-13 14:06:09772 移动机器人的发展对中国进入工业4.0的发展起到了重要作用。随着中国人口红利的逐渐消失,人力成本不断上升,人口老龄化等世界性难题,招工难问题愈发严峻,未来,移动机器人将被大量应用于半导体、新能源、交通运输、3C电子制造等制造行业,促进各行业提质增效和高质量发展。
2023-03-13 11:23:36564 仓库和工业自主移动机器人
2022-12-30 09:40:08273 
电子发烧友网站提供《开发用于移动机器人的Arduino扩展.zip》资料免费下载
2022-12-28 10:40:280 在室内外移动机器人产业浪潮的推动下,移动机器人市场持续升温,行业分工作业将机器人分为机器人行业应用端与模块化机器人底盘 。
2022-12-20 14:32:231400 在室内外移动机器人产业浪潮的推动下,移动机器人市场持续升温,行业分工作业将机器人分为机器人行业应用端与模块化机器人底盘 。
模块化移动机器人底盘承载了机器人自身的定位,导航及避障功能,实现机器人实现智能行走,在模块化移动机器人中目前主要有哪几种机器人结构呢?
2022-12-14 10:58:57685 
电子发烧友网站提供《基于树莓派的移动机器人实现.zip》资料免费下载
2022-10-27 11:48:2915 行业需求旺盛,如何快速拥有适合自己的复合移动机器人?如何快速抢占复合移动机器人市场?科聪移动机器人整体解决方案,快速构造复合移动机器人简单、方便,用户可更加注重功能开发和应用。
2022-03-28 11:15:27626 
MRC5000是一款全自主知识产品的移动机器人领域专业控制器产品。MRC5000具有“可靠、稳定、灵活、易用“等特点,内置多种导航算法,支持各种国内外常用型号导航传感器,具有防火墙功能和无线路由功能
2021-11-22 16:14:01
近年来,移动机器人的研究受到了人们的高度重视,人们对于机器人的要求不再局限于简单的移动,而是希望机器人能够根据周围环境变化采取对应措施,做到自主移动的能力。因此,路径规划作为移动机器人的一个重要因素
2021-10-14 14:38:361743 本文比较了机械臂和移动机器人两种工业机器人的控制系统方案,对其特点进行了介绍。 以上分类是根据应用对象,此外,市面上更多的是通用型运动控制器,即控制非标设备的。 1 控制器底层方案1.1 机械臂类
2021-07-22 17:37:342654 随着越来越多企业进入到移动机器人领域,目前移动机器人领域的竞争将会越来越激烈,但对整个服务机器人产业而言,移动机器人低成本化已势在必行。而作为移动机器人必不可少的硬件——移动机器人底盘虽然是众多
2021-06-16 17:12:312650 利用Matlab 建立移动机器人的动力学模型,在虚拟现实(VR ) 环境下,实时仿真移动机器人路径跟踪的运动特性, 为基于Internet 的机器人遥操作试验搭建了仿真平台。 实验结果表明,虚拟模型
2021-01-15 17:20:3513 你觉得打造移动机器人难吗?你想知道轻松如何打造移动机器人?你想打造属于自己的专属移动机器人吗?
2020-12-26 09:57:54612 相较于传统的磁条导航、二维码导航移动机器人,激光导航移动机器人以其自主灵活的优势越来越受到用户的青睐,并在工业制造、电子制造、电商仓储、医疗教育、食品烟草、安防巡检等各行各业得到了广泛应用。对于磁条导
2020-12-26 09:45:31508 近年来,移动机器人的研究受到了人们的高度重视,人们对于机器人的要求不再局限于简单的移动,而是希望机器人能够根据周围环境变化采取对应措施,做到自主移动的能力。因此,路径规划作为移动机器人的一个重要因素就显得尤为重要
2020-12-26 09:28:41468 工业物流机器人系统主要有业务系统、调度系统和工业移动机器人三大部分组成。本次介绍的是工业移动机器这部分。
2020-12-26 09:14:41125 机器狗、停车AGV、激光slam叉车……,11月新品缤纷! 腾讯——四足移动机器人平衡轮式移动机器人11月20日,腾讯Jamoca四足移动机器人和自平衡轮式移动机器人首次对外亮相
2020-12-09 18:20:451945 高工机器人产业研究所(GGII)数据显示,2019年全球移动机器人市场规模139.5亿元人民币,同比增长5.68%;2019年AGV市场规模39.95亿元,同比增长14.77%,至2025年中国移动机器人
2020-11-27 11:25:272798 机器人与协同设施间的通信:在柔性生产中,移动机器人是关键的执行者。无人工厂要求多台移动机器人之间的协同和无碰撞作业,所以移动机器人之间需要实时进行数据交换满足该需求。移动机器人和外围设备间也需要进行通信进行实时数据交换。
2020-10-09 17:05:132451 8月18日,2020高工移动机器人产业峰会于杭州举办。会议聚焦移动机器人市场、技术和应用,旨在联动移动机器人产业链上下游企业,共商移动机器人产业的发展之路。在同期举办的行业颁奖典礼上,海柔创新再创
2020-08-19 17:40:501720 自主移动机器人 (AMR) 市场继续蓬勃发展,运营供应链的跨国制造商将灵活的协作机器人整合至其仓库自动化总体战略中。自主移动机器人是一种简单、高效、经济适用的选择,几乎可以代替需要员工手推推车在设施周围运送物料的全部工作,自动完成物料搬运和内部运输任务。
2020-08-06 09:32:42953 导航技术是移动机器人的一项核心技术之一它是指移动机器人通过传感器感知环境信息和自身状态,实现在有障碍的环境中面向目标的自主运动” 目前,移动机器人主要的导航方式包括:磁导航,惯性导航,视觉导航等
2020-07-20 17:16:5717 相较于传统的磁条导航、二维码导航移动机器人,激光导航移动机器人以其自主灵活的优势越来越受到用户的青睐。
2020-03-21 09:55:112423 你觉得打造移动机器人难吗?你想知道轻松如何打造移动机器人?你想打造属于自己的专属移动机器人吗?现在,给大家透露一下轻松打造移动机器人的秘诀吧,它就是——SRC核心控制器。
2020-01-31 10:40:001964 相较于传统的磁条导航、二维码导航移动机器人,激光导航移动机器人以其自主灵活的优势越来越受到用户的青睐,并在工业制造、电子制造、电商仓储、医疗教育、食品烟草、安防巡检等各行各业得到了广泛应用。
2020-01-27 17:25:001856 伴随移动机器人(AGV)产业快速发展,激光导航移动机器人以其自主、灵活、高效、精准的优势成为市场上最受欢迎的移动机器人产品,并在工业制造、商用服务等诸多领域广泛应用。
2019-12-05 10:27:201183 利用Matlab 建立移动机器人的动力学模型,在虚拟现实(VR) 环境下,实时仿真移动机器人路径跟踪的运动特性,为基于Internet 的机器人遥操作试验搭建了仿真平台。 实验结果表明,虚拟模型准确
2019-10-25 11:32:369 随着计算机的应用和传感技术的发展,移动机器人研究又出现了新的高潮。
2019-07-08 09:45:304158 移动式机器人的控制系统的作用是生成控制信息,控制机器人的执行机构进行运动。跟踪设定轨迹是设计移动机器人的一项重要任务,其工作过程根据设定好的路线转为运动控制信号传输给机器人,移动机器人根据控制器信号完成相应的动作,最终达到设定的目标位置。
2019-06-12 14:49:382605 
仙知机器人是一家专注于移动机器人领域,以移动机器人控制系统与调度系统研发为核心的高新技术企业。
2019-05-08 09:54:562987 随着科技的发展,移动机器人越来越多在工业、农业、军事和医学等领域得到广泛的应用,然而要使移动机器人实现自主化首先面临的问题就是如何实现机器人创建所处环境的地图并同时利用该地图进行定位(即同时定位
2018-03-09 11:16:050 一、移动机器人的分类 移动机器人从工作环境来分, 可分为室内移动机器人和室外移动机器人; 按移动方式来分: 轮式移动机器人、步行移动机器人、蛇形机器人、履带式移动机器人、爬行机器人等; 按控制
2017-10-26 11:11:1916 移动机器人分类 移动机器人从工作环境来分0可分为室内移动机器人和室外移动机器人1按移动方式来分!轮式移动机器人。步行移动机器人。蛇形机器人。履带式移动机器人。爬行机器人等1按控制体系结构来分!功能式
2017-09-16 09:18:5913 移动机器人自动充电系统
2016-12-10 00:10:3916 电路教程相关知识的资料,关于移动机器人的视觉处理方法
2016-10-10 14:34:3127 信息融合的移动机器人自定位,感兴趣的小伙伴们可以瞧一瞧。
2016-09-18 17:15:0510 移动机器人是机器人的重要研究领域,人们很早就开始移动机器人的研究。
2016-08-05 13:27:591437 《移动机器人原理与设计》第三章运动学 移动机器人会大规模的应用于生产实践中
2016-05-30 15:08:130 移动机器人导航所采用的主要的技术,红外,地磁等等。
2016-05-23 16:29:075 移动机器人的在线实时定位研究!资料来源网络,如有侵权,敬请原谅!
2015-12-25 09:49:3610 移动机器人导航与定位技术!资料来源网络,如有侵权,敬请原谅!
2015-12-25 09:49:2713 全自主移动机器人!资料来源网络,如有侵权,敬请原谅!
2015-12-25 09:36:0614 移动机器人激光全局定位系统的算法研究移动机器人激光全局定位系统的算法研究
2015-12-18 16:29:3814 摘要: 针对移动机器人的局部视觉定位问题进行了研究。首先通过移动机器人视觉定位与目标跟踪系统求出目标质心特征点的位置时间序列, 然后在分析二次成像法获取目标深度信息的
2012-06-18 14:34:472177 
研究了轮式 移动机器人 (WMR ) 的运动问题, 分析了一种理想滚动情况下航向角控制的差动运动模型. 通过算例证明该方法简单实用, 在轮式移动机器人的路径规划与定位控制中有一定的参
2011-06-28 11:07:2633 PLC的浆液下移动机器人控制系统
摘要:结合浆液下移动机器人系统的功能要求及PLC的特点,构建了桨液下移动机器人的控制系统。为提高该机器人系统的经济效
2010-04-21 17:58:16663 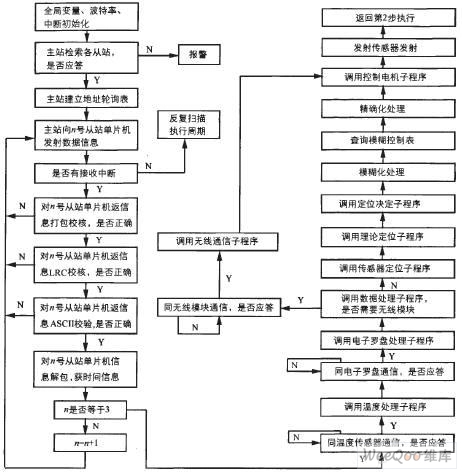
针对Pioneer3-AT移动机器人的特点,基于无线局域网设计并实现了一种移动机器人远程控制系统。简要介绍了系统的工作原理及移动机器人的体系结构,给出系统服务器和客户端程
2009-08-06 11:41:3140 对国内外移动机器人智能导航研究中采用的几种导航方式进行了对比, 对近几年发展起来的并已在移动机器人导航研究领域中得到应用的相关技术进行了论述, 对自主式移动机器人导
2009-07-10 08:21:4022 导航与定位是移动机器人应用中的一个瓶颈技术,针对移动机器人所处的不确定环境和自身状态的不可测性,本文系统综述了导航中相关关键技术,并提出了若干应用需求中的技
2009-05-27 13:37:2425 针对传统移动机器人的实时性差和扩展性差的局限性,在达芬奇技术的基础上,通过裁减定制,去除冗余的功能,设计了一种移动机器人的开发平台。该机器人系统包括移动机器
2009-02-10 15:55:4766
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论