样/取样说明。服务范围产品/行业服务范围:无人机整机系统、无人机机巢、无人机搭载的相关传感器等。无人机、飞行器研发生产厂家。检测标准可以做的标准均列出(包含上方套
2023-09-21 17:17:23
无人机电子电路设计图集锦 无人机相比较卫星和载人航空飞机遥感平台而言,具有成本低、灵活性高的特点。为了满足科学遥感实验、完成遥感作业任务、协调无人机电子吊舱中多组件工作、控制遥感影像传感器姿态
2015-04-24 11:39:29
1 无人机遥感的历史和现状 1.1 发展历程 1916年9月12日, 一架由英国人研制的无线电操控的无人机首次试飞, 标志着无人机发展的开始。到2016年为止, 无人机的发展已经经历了100年的历史
2022-06-10 13:29:50 2280
2280 
。与此同时, 无人机在民用领域也开始了应用尝试。(3)迅速崛起阶段(1991—2009年):这个阶段无人机在民用领域越来越多地运用到各个行业中。例如, 2008年我国将无人机遥感应用于冻雨灾害和汶川地震
2022-05-16 09:33:508503 无人机高光谱以无人驾驶飞机为探测平台, 利用搭载的各种任务负荷(通常是成像光谱仪等非接触式监测设备)获取有关农田和作物的遥感数字信息, 通过对数据的后期处理、挖掘和建模, 来获取农作物长势、农田环境等信息。
2022-04-25 10:12:041248 基于反遥感技术的无人机反制策略。基于无人机的遥控原理可以分别从无线遥控信号干扰和无线遥控信号欺骗两种通信方法展开。 无人机在执行飞行任务的过程中,必须由地面人员发出遥控指令加以控制,使之做出各种动作
2022-03-25 15:53:09263 基于图像分割的无人机遥感影像目标提取技术
2021-06-29 16:06:29 11
11 无人机云台是无人机用于安装、固定摄像机等任务载荷的支撑设备。 而无人机云台电机是利用压电材料输入电压会产生变形的特性,使其能产生超声波频率的机械振动,再透过摩擦驱动的机构设计,让云台电机如同电磁马达
2021-06-03 17:50:346856 无人机云台是无人机用于安装、固定摄像机等任务载荷的支撑设备。而无人机云台电机是利用压电材料输入电压会产生变形的特性,使其能产生超声波频率的机械振动,再透过摩擦驱动的机构设计,让云台电机如同电磁马达一般,可做旋转运动或直线式移动。
2021-05-25 11:33:447 无人机遥感,既是利用先进的无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通讯技术、GPS差分定位技术和遥感应用技术,具有自动化、智能化、专用化快速获取国土、资源、环境等空间遥感信息,完成遥感
2018-07-22 11:29:0010189 无人机遥感(UnmannedAerialVehicleRemoteSensing),既是利用先进的无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通讯技术、GPS差分定位技术和遥感应用技术,具有
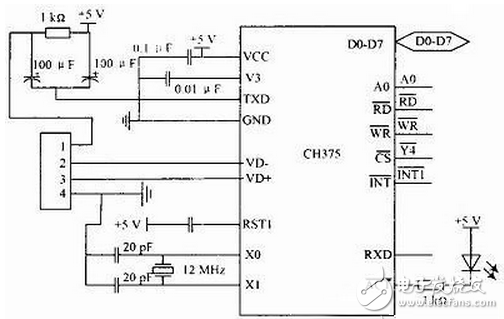
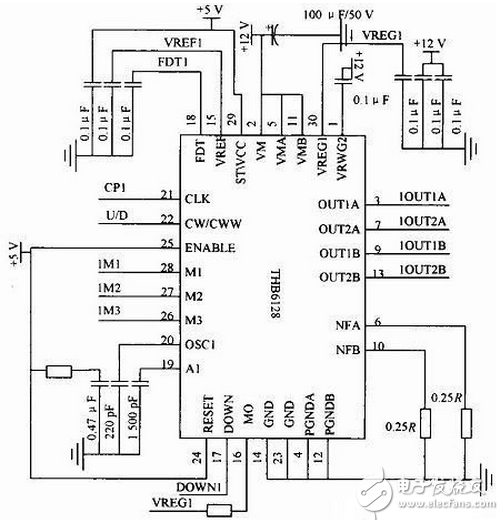
2018-06-20 14:42:007682 为了满足科学遥感实验、完成遥感作业任务、协调无人机电子吊舱中多组件工作、控制遥感影像传感器姿态,系统以 AT89S52 为主控芯片,扩展多路串口及USB接口以实现系统与外围设备的通信,同时设计了相机驱动模块及三自由度步进电机驱动模块。
2018-03-27 10:53:002206 
无人机遥感(Unmanned Aerial Vehicle Remote Sensing ), 既是利用先进的无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通讯技术、GPS差分定位技术和遥感
2017-10-12 09:31:044 随着无人机越来越广泛的应用,它所完成的任务也越来越复杂,对无人机的机动性要求也越来越高,这就要求无人机的控制核心向高集成度和小型化方向发展。
2017-02-08 15:23:2127723 首先介绍了无人机遥感的国内外现状;然后分析了非战争军事行动对无人机遥感在时效性、多样性、高精度等方面的需求论述了无人机遥感在灾害应急救援、海域和海岛动态监视监测以及应急测绘中的应用;最后对无人机遥感的应用前景进行了展望。 更多还原
2016-01-11 16:00:441 阐述了无人机遥感兴起的背景。从无人飞行平台、飞行姿态控制与导航、数据传输与存储、数据处理、传感器技术、空域使用政策等方面探讨了发展无人机遥感系统的基础、问题、研究进展和趋势。通过描述无人机遥感系统在
2016-01-08 14:04:313 遥感无人机传感器是根据不同类型的遥感任务,使用相应的机载遥感设备,如高分辨率CCD数码相机、轻型光学相机、多光谱成像仪、红外扫描仪,激光扫描仪、磁测仪、合成孔径雷达等。
2015-05-18 09:43:165534 无人机相比较卫星和载人航空飞机遥感平台而言,具有成本低、灵活性高的特点,通过无人机航空遥感能够满足需求。
2015-04-24 14:53:0172536 随着科技不断发展,无人机已然成为时下的热点,相关电子设计也逐渐被工程师所亲睐,如无人机遥感技术、无人机航拍技术、无人机飞控技术、机载云台等等,为满足电子爱好者的需求,电子发烧友特整理了无人机技术专题,包括最新的无人机技术热点,最无人机解决方案以及相关无人机电路设计集锦,供广大电子工程师品读。
2015-04-24 13:37:43

为了满足科学遥感实验、完成遥感作业任务、协调无人机电子吊舱中多组件工作、控制遥感影像传感器姿态,系统以AT89S52为主控芯片,扩展多路串口及USB接口以实现系统与外围设备的通信,同时设计了相机驱动模块及三自由度步进电机驱动模块。
2015-04-21 11:46:084892 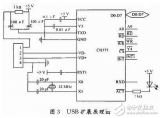
无人机相比较卫星和载人航空飞机遥感平台而言,具有成本低、灵活性高的特点。为了满足科学遥感实验、完成遥感作业任务、协调无人机电子吊舱中多组件工作、控制遥感影像传感器姿态,系统以AT89S52为主控芯片,扩展多路串口及USB接口以实现系统与外围设备的通信,同时设计了相机驱动模块及三自由度步进电机驱动模块。
2014-11-27 16:18:331666
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论