工业相机仅是机器视觉系统的代表之一。在整个机器视觉系统中,光源、镜头、相机,相互制约,但其中的关键点....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-10 08:48
•810次阅读

自动光学检测(AOI)是电子印刷电路板(pcb)制造和测试中的一项关键技术。自动光学检测,AOI能够....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-08 09:43
•763次阅读
基于深度学习模型融合的工业产品(零部件)工艺缺陷检测算法简述 1、序言 随着信息与智能化社会的到来....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-06 14:49
•367次阅读
原理:通过直接测量光传播的时间,确定物体的面型。发射脉冲信号,接受发射回的光,计算距离。
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-04 17:42
•1594次阅读
判断机器视觉的照明的好坏,首先必须了解什么是光源需要做到的!显然光源应该不仅仅是使检测部件能够被摄像....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-04 16:50
•293次阅读
在深度相机的主流技术方案Structure Light,ToF,Stereo Dual)中,主动....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-04 11:33
•1724次阅读
机器视觉的光源选型及打光方案分析 2.2.1 光源选择标准 光源的选择标准如下: (1)光源均匀性要....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-03 16:00
•1441次阅读
光源从大类上可分为普通自然光和人造光源,由光照强度、色温及光源的几何形状来描述。在不锈钢表面缺陷检测....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-03 15:51
•3008次阅读
在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-03 15:45
•2556次阅读
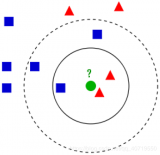
举例说明: 如果K=3,绿色圆点的最近的3个邻居是2个红色小三角形和1个蓝色小正方形,少数从属于多数....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-03 10:33
•511次阅读
在这篇OpenCV Python文章中,我想展示OpenCV中的基本颜色检测示例。 我们用颜色空间或....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-03 10:30
•645次阅读
相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。这篇博客介绍相机的成....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-03 10:30
•4699次阅读

我的论文方向目前是使用单目摄像头实现机器人对人的跟随,首先单目摄像头与kinect等深度摄像头最大的....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-03 10:01
•1933次阅读

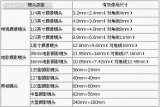
光学镜头一般称为摄像镜头或摄影镜头,简称镜头,其功能就是光学成像。镜头是机器视觉系统中的重要组件,对....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-03 09:59
•595次阅读
线阵相机顾名思义就是取像是成线性的。它的传感器是成线型的。
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-03 09:58
•725次阅读
相机是机器视觉解决方案系统的核心部件,广泛应用于各个领域,尤其是用于生产监控、测量任务和质量控制等。....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-30 15:23
•931次阅读
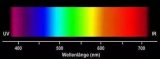
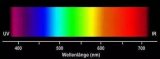
多光谱成像技术自从面世以来,便被应用于空间遥感领域。而随着搭载平台的小型化和野外应用的需求,光谱成像....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-29 17:03
•948次阅读
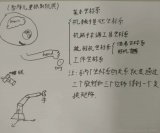
【导读】很多小伙伴都对机器人非常感兴趣,但是不知道一个机器人系统有哪些部分组成,到底是怎么实....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-28 17:00
•606次阅读

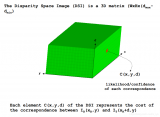
根据Schrstein和Szeliski的总结,双目立体匹配可划分为四个步骤: 匹配代价计算、代价聚....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-28 16:59
•716次阅读
机器视觉基本组成 根据美国自动成像协会(AIA)的定义,机器视觉(Machine Vision)是一....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-27 15:35
•714次阅读
使用C#的语法方式逐句改写Halcon代码
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-27 14:51
•2012次阅读
进入OpenCV官网,release发行版中选择需要下载的OpenCV版本,下载Windows版本,....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-27 14:40
•3188次阅读

1. 点结构光的缺点 点结构光只能获取单个点的深度信息,如要获取整个被测对象表面结构信息,需要沿着水....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-26 11:33
•342次阅读
论文链接:https://arxiv.org/ftp/arxiv/papers/1910/19....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-26 10:51
•356次阅读

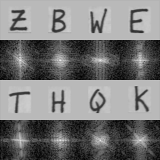
在本教程中,您将学习如何使用OpenCV和快速傅里叶变换(FFT)在图像和实时视流中执行模糊检测....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-26 10:47
•488次阅读
目前市场上共有两种类型的采集方法可用于采集物体的图像:面阵扫描和线扫描。最常见的2D机器视觉系统使用....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-26 10:29
•1939次阅读

基于点云的3D障碍物检测 主要有以下步骤: 点云数据的处理 基于点云的障碍物分割 障碍物边框构建 点....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-26 10:22
•547次阅读

利用opencv+openpose实现人体姿态检测,附详细代码。 通过一个偶然机会,我了解到了人体姿....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-26 10:15
•2284次阅读

今天介绍一下深度图像的获取方法主要有哪些,以及这些方法会导致深度图像中存在什么样的问题。 在计算....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-25 16:26
•690次阅读

机器视觉在工业上应用领域广阔,核心功能包括:测量、检测、识别、定位等。产业链可以分为上游部件级市场、....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-25 15:12
•557次阅读





 工商网监
工商网监