 机器人会“轻功”!一条腿跳遍天下
机器人会“轻功”!一条腿跳遍天下
据美国陆军研究实验室网站今年5月份底报道,在美国陆军资助下,加州大学伯克利分校仿生微系统实验室的研究人员开发出了一种名为Salto的敏捷机器人,能够协助进行侦察和搜救行动。
为了设计出这款机器人,加州大学伯克利分校的工程师们专门研究了动物王国中垂直跳跃能力最强的动物——非洲婴猴。婴猴能在短短四秒内完成五次垂直跳跃,最终达到8.5米(约27.8英尺)的高度。一项研究表明,机器人Salto能实现婴猴78%的弹跳能力。
▲跳蚤型机器人
早在2016年12月,研究团队已经研制了这款机器人的初代产品Salto,Salto每隔0.58 秒进行一次高达 1 米的跳跃,其敏捷性达到1.7 m/s。随后该实验室研究人员将 Salto 升级为 Salto-1P,与此前版本不同的是,实验员为新的 Salto-1P 新增了一对推进器,使得机器人能跳得更快、更高、更远,灵敏度达到 1.83 m/s。
Salto机器人重量仅为100克,身高不足1英尺,具有一条强有力的腿,其弹跳高度超过了自身高度的3倍,是世界上垂直跳跃最敏捷的机器人。Salto能够连续快速跳跃,穿过废墟等复杂的地形,而这些地形只有通过跳跃或飞行的方式才有可能穿过。与先蓄力再跳起的蚂蚱或蟋蟀不同,研究人员寻求一种可以连续跳跃的运动机制,使机器人能够实现在无法停留的地方短暂着陆。
▲跳蚤型机器人
“小型机器人可以做很多事,比如去大型机器人或人类无法活动的地方。假设在灾难发生时,人类可能被困在碎石碎砖里面,这时候它们就可以用于寻找受灾的人,且不会对救援者造成危险,甚至会比没有辅助工具的救援者更快。” UC 伯克利机器人学博士生 Justin Yim 表示,“我们希望 Salto 不仅体型小,还能够跳得很高、很快,这样它们就可以在困难的环境中也能行走自如了。”
Yim 和 UC 伯克利电气工程和计算机科学教授 Ronald Fearing 合作进行该项目。Ronald Fearing 所在的仿生微系统实验室(Biomimetic Millisystems Lab)致力于探索如何利用动物运动机制创建更加灵活的机器人。该实验室因构建受昆虫启发的机器人而闻名。
▲UC 伯克利机器人学博士生 Justin Yim 领导了 Salto 项目,通过复杂的控制软件为 Salto 编程,从而让它掌握复杂的动作
三年前,Salto 的设计团队展示了 Salto 如何跳跃,然后通过在墙壁上借力立即跳得更高,这使它成为世界上在垂直跳跃方面最灵活的机器人。之后,Yim 领导设计了复杂的控制系统,让 Salto 掌握更加复杂的任务,比如在一个地方弹起、穿过有障碍物的路径,以及跟踪一个移动的目标。
近期加州大学伯克利分校的研究人员已经升级了这款机器人,赋予它许多新功能,并在2019机器人与自动化国际会议(ICRA)上进行了展示。
研究人员设计了一套无线电控制系统,使Salto可以完成更加复杂的动作,如原地弹跳、穿越障碍物、以及跟踪移动目标等。Salto可实现原地多次弹跳,弹跳时间可超过10分钟,次数超过100次,垂直弹跳高度可达1.2米,速度最高为12-16km/h。研究人员希望Salto能够推动小型敏捷机器人的发展,这类机器人可以在废墟上跳跃移动,支援搜救行动。

▲跳蚤型机器人垂直跳越高度
研究人员为Salto开发了新的技术,能够实现其自我感知。为实现这一功能,研究人员在室内对Salto进行训练,利用运动捕捉摄像机追踪其准确的角度和位置,将数据传输至计算机,快速计算数据并反馈给Salto,告诉它如何调整角度进行下一次跳跃。现在,Salto能够感知自己的身体和动作,自己进行运算,因此研究人员可以将它带到户外,用无线电操纵其行动路线。
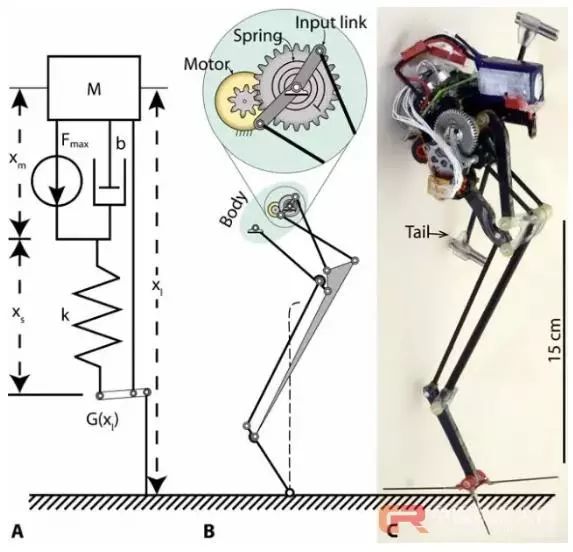
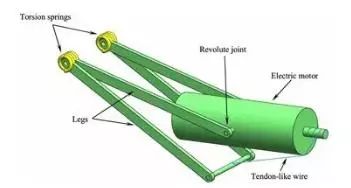
▲跳蚤型机器人结构
目前Salto已经成功地在伯克利校园的人行道、砖瓦地和草地上行走。研究人员称,用于Salto的数学模型还可以应用于其它类型机器人的运动控制,此外通过理解力作用于Salto的方式、及其质量和大小,可以将研究进行拓展,构建其他不同体型、形状、重量的机器人。
▲跳蚤型机器人的蝗虫跳跃原理
陆军研究实验室研究人员称,部队作战环境混乱且不断变化,这些研究对于实现未来军事行动所需的机动能力、行动速度和态势感知能力至关重要。在复杂的三维地形中,传统的轮式和履带式运动受到了严重的限制,这一项目提升了当前小型地面机器人的机动能力,有助于为士兵提供可以部署在战场上的无人系统。
-
传感器
+关注
关注
2522文章
47984浏览量
739695 -
机器人
+关注
关注
206文章
26974浏览量
201301
原文标题:美国造出会“轻功”的机器人,飞檐走壁,一条腿跳遍天下
文章出处:【微信号:robotn,微信公众号:产业大视野】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论