 关于电机控制技术给机器人带来的影响分析
关于电机控制技术给机器人带来的影响分析
更妙的是,高级算法如PID(比例-积分-微分)校正算法或者FOC(磁场定向控制,有时也称之为矢量控制)控制算法能被固化到电机控制器中去。这使得理想的电机操作和负载及负载变化相匹配,从而强化电机性能。这些算法可以考虑到如马达惯性等相关因素,并且使电机驱动器适应由于机械因素如隙或其它来源导致的错误。利用这样的算法使精确控制加速和扭矩曲线以及设置速度成为可能。
与有刷电机相比,无刷电机虽需更复杂的控制电路但却可以表现出更优的性能。通常BLDC电机需要配备一个反馈传感器,比如霍尔效应器件,光学编码器,或者反电动势检测器件。(注意,通过获取传感反馈,传统有刷电机也能达到高级控制的效果,但内部设计和机电问题还是会影响电机性能。)
另外一个无刷选择是步进电机(图4),此时用到开关的电磁铁,电磁铁安置在中间磁芯环旁。通常步进的角度范围为大约1.8°(200步/转)至30°(12步/转),取决于永磁铁的个数,这个范围之外的值也是可以实现的。

图4:步进电机中使用环绕在永久磁芯周围的环形电磁极;通过改变这些电磁极的通电顺序,电机可以产生转动力。(图片来源:Microchip Webinar)
通常来说步进电机并不转;取而代之,是轴一步一步定向移动,继而可被引导来转动完整旋转的一小部分,或者进行连续旋转。如果通电却没有步进指向,它们会维持在原位置;步进电机能以低rpm提供高扭矩。让步进电机转动最直接的方法是有序通断电磁铁,但这可能会带来抖动或振动。为了在某些不能容忍上述问题的情形下避免它们,一些高级的控制器支持了细分步进,此时绕组也按如此方式通电,这会使步进动作更加流畅,当然也比简单的通断控制更有持续性。
在无刷电机和步进电机的应用领域之间有重叠部分。步进电机更适合于需要精确的进退动作,如捡拾和安置的应用领域,而不是需要长时间持续转动的领域,也适合于小的应用领域如不需要电机来提供高扭矩或速度的领域。另一方面,步进电机没有无刷电机能效高。
还有许多其它的电机可供选择。电机的系列很多并且复杂,有很多的分支。例如,永磁铁同步电机(PMSM)是无刷电机(相对于转子)和交流感应电机(相对于定子结构)的结合体。它显示出了高能效、小体积中相对功率高、高扭矩重量比,快速响应时间还有相对容易控制等等特点,但价格相对也比较高。
控制需要技巧
一个电机自身,甚至加上基本的电机电流控制部分,并不能构成一个机器动作系统,机器动作系统的组成包含三个主要功能模块(图5):
1.实时控制器,表现为以下三种形式:一是作通常用途、运行着动作-控制固件的快速计算处理器;二是应用在控制方面、面向DSP的FPGA;三是带硬连线和内置算法的专用控制器IC电路。
2.一个或多个级联的驱动层,以把低层信号从控制器输出中取出,然后输出控制电子器件通断所需要的高电压/电流。
3.MOS管(或者其它开关器件如IGBT或者双极型晶体管),其真正控制了流向电机绕组的电流。
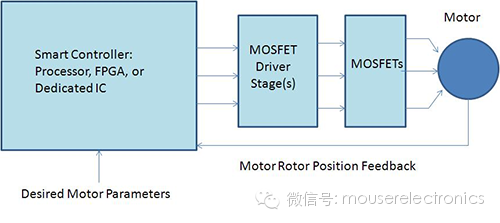
图5:一个完整的电机控制链中包含用作算法执行和计算的智能控制器。控制器的输出送到MOS管驱动级,继而反过来控制电机的电源开关——MOS管;许多应用中也存在着一个反馈回路,可以提供机器人的实时位置信息,因而也能被用来改变速度和加速度。(来源:Bill Schweber)
选择元器件时,具体MOS管的选取首要取决于电机和绕组所需的电流和电压大小。尽管有成千上万种MOS管可供挑选,最终的选择往往由电机的这些额定值所决定(当然价格也是个很重要的考虑因素)。
一旦MOS管型号确定下来了,MOS管驱动器的选择则由MOS管的额定值所决定;如果额定值很大,那可能需要一系列驱动组,取决于MOS管的尺寸。和MOS管本身的选择一样,驱动器的选择很大程度上取决于通断MOS需要多大的电压和电流。(注意此时在“驱动器”这个术语上有模糊和重叠性,因此请仔细查阅数据手册;一个“驱动器”可能指用来驱动MOS管的模块,也可能指“驱动”电机线圈的MOS管。或者更进一步,在某些芯片上“驱动器”IC同时包含了MOS管和它们的驱动器。)
-
元器件
+关注
关注
111文章
4519浏览量
88580 -
机器人
+关注
关注
206文章
26980浏览量
201315 -
电机控制
+关注
关注
3463文章
1697浏览量
264278
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论