 关于机器人运动控制系统分析介绍
关于机器人运动控制系统分析介绍
随着机器人制动器从液压型向全电气化的转变,电子零件供应商现在已经能够提供全部的电机控制参考零件,例如电动机、MOSFET晶体管、驱动器、处理器、控制算法以及电源连接器。
机器人运动系统通常是采用电子器件实现控制、液压系统实现动力或者说是"机器人的肌肉"。现在电动机技术取得了先进的发展(如无刷电机和步进电机),电动机控制零件(从MOSFET/IGBT到门驱动器)、传感器技术、控制处理器和算法,全部都可以采用电气化方式来实现。比如我们可以采用电动机实现制动,取代传统的液压活塞方式。
大多数人都支持这种趋势,根据ABI研究协会的调查,"消费机器人市场到2015年会实现3300万的出货量,总体市场份额会达到35亿美元。2025年前,出货量和市场份额都会显著增长,ABI研究协会预测出货量会达到165百万套,总的市场份额也会在翻四倍多,达到170亿美元。"更进一步讲,作为大型机器人系统供应商的Keller HCW GmbH指出"工程师更愿意在一些敏感的应用中使用电动机,不仅满足更宽泛的要求而且更容易维护和调试。"
有一个好消息就是从采购和开发的角度来看,开发一个全电气化的机器人制动器或者运动控制子系统再简单不过了。电子零件供应商提供了非常多的选择和开发板卡。这些工具能够帮助工程师验证他们的概念设计、完成具体的应用代码、驱动电机、完成机器人运动控制系统大部分设计的验证。
这篇文章介绍了一些机器人相关的参考设计和开发板卡,解决了工程师所面临的一些挑战,为实现机器人系统提供快速、精确和强大的电机控制解决方案。参考设计和评估板卡之间又有哪些不同呢?从某种程度上看,只是语义和使用角度的不同。一个参考设计时一个全面的随时可以应用的设计,具备原理图、材料清单(BOM)、PCB、性能测试数据、以及其它具体功能方面所要求的,对于用户来讲研究或者修改方面灵活性不高。举个例子就是某个LED自定义电流负载驱动器的参考设计。
正好与其相反,评估板卡的设计就是用来测试某些功能或者组件的,可能会包含一些额外的测试相关电路或者功能模块,这些可能在最终的设计中是不需要的。这些工具包会省去PCB和材料清单相关信息,但是我们仍然可以拿过来用于实现系统设计。现实的情况是供应商提供的资料一些只是作为参考设计,一些只是用于评估开发,而且很多都具有一些交叉属性。
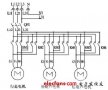
一个典型的运动控制系统参考设计(如图1)包括如下组件:
1. PC端实现的运动控制算法以及用户接口,对于性能和功能可以自定义开发。 2. 驱动/接口板卡(或者其他名字)能够为MOSFET/IGBT驱动器提供底层的控制信号,我们可以借助各种类型的接口(比如USB、SPI、I2C等协议接口)与PC端连接。 3. MOSFET/IGBT驱动器能够提供独立信号用来开启和关闭MOSFET/IGBT器件的电源,可以说这是实现低压电子控制高压设备之间的接口。 4. MOSFET/IGBT能够提供切换和控制电动机绕组的电源。 5. 就电动机而言,通常是无刷直流或者步进电机,有时候也可能采用交流电机,直流电机通常多用于中低端电源应用场景,在高电压和工业级应用则多采用交流电机。 6. 可选的反馈传感器(编码器或者霍尔效应等等)以及接口电路,在一些控制型设计中是必需的,这样系统才能判定电机的实际情况(转速、加速度等),进而控制器对电机的控制实现更新矫正。
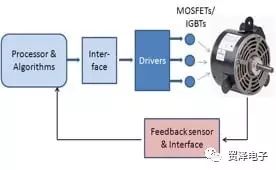
图1 上图展示的是处理器和算法、电动机以及反馈环节,我们还可以增加其他关键的功能模块,每一级的功耗和电压一次提升
一款通用的开发套件
这款全面的参考设计包括电机驱动器、接口电路、PC端的电机控制算法和开发工具,甚至提供了电缆和连接器,实现MOSFET和电动机的供电,有时候也会提供电动机。这些电路和布局设计可以用于最终设计或者轻微修改即可。
评估板卡的设计不是很全面,通常需要多块电路板的组合才能实现与PC机的连接,这样PC上的驱动算法才能够为高压电路或者电机接口提供驱动信号。它们属于我们临时构建的模块,可用于后续的最终系统设计中。
介绍一款开发套件——亚诺德(ADI)半导体公司推出的AD-FMCMOTCON2-EBZ(见图2)开发板卡,它是一款全面的高性能的伺服系统,支持三相永磁同步无刷直流电机或者步进电机,功率支持48V20A。能帮助工程师实现快速建模以及电机控制算法的开发实现。
图2 亚诺德(ADI)半导体公司推出的AD-FMCMOTCON2-EBZ开发套件:上面是无刷直流电机负载,以及AD-DYNO2-EBZ功率测试电机,下面是驱动板卡,左面的是控制器板卡(来源:ADI公司)
这款开发套件包括两块板卡和软件工具,通常很多机器人和运动控制应用都需要至少两个电动机来实现X和Y方向的移动,这个套件支持两个独立的电动机,独立供电操作,所以两个电动机之间的电压互不干扰。
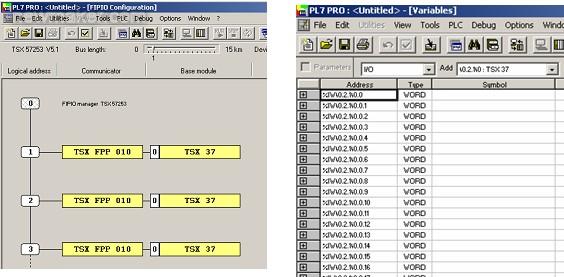
驱动板卡集成了ADI出品的绝缘栅驱动器支持高频信号输出,电流和电压测量同样使用隔离的模拟数字转换器(ADC),因此由于非绝缘导致的安全问题能够有效的避免,尽管我们可以采用传感器的反馈,但是也支持无传感器的控制模式或者无刷直流电动机。我们设置了过电流和反向电压保护,当我们在设计中使用QDESYS电动机控制IP核和以太网模块时,用户可以实现矢量控制算法(FOC),集成到FPGA项目中并进行一定的优化(如图3)。

图3 在QDESYS电机控制IP和以太网模块设计的基础上实现矢量控制算法和PWM电动机控制操作,能够设置关键参数以及性能检查(来源:ADI)
还有一个特性就是AD-DYNO2-EBZ支持功率监测扩展了整个驱动系统,这个可动态调节的负载系统用于测试实时电机的控制性能。功率测试计包括两个无刷直流电机,并且是直接耦合的:一个作为负载并且有自己的嵌入式控制系统,另一个电动机则主要用于用户的自定义功能开发,采用AD-FMCMOTCON2-EBZ FMC板卡实现驱动。
采用高级抽象命令实际上降低了处理器的负载。位置控制器是可配置的,支持不同类型的电动机、位置移动范围以及其它参数,如数据、加速度、减速、保持电流和安全位置。这个模块可以重新编程实现检测和作用于转子的机械阻塞效应。它支持步进电机的细分控制,如1/2, 1/4, 1/8和1/16细分模式,可编程的峰值电流最高达800mA以及20KHz PWM方波调节信号,支持快慢的衰减模式自动化选择。配置方式还支持32个控制节点,斜率控制、可控的PWM信号频率和抖动(避免共振)。
不要忽略掉连接器
当一个设计中包含电动机,一般我们选择的低电流和低电压的连接器并不适合MOSFET/IGBT驱动板卡和电动机之间的互连。主要有以下几个原因:
电动机的电流和电压可能比PC主板的典型电压值高一些;
电动机连接在操作过程中经常会出现震动,主要是由于操作条件和处理不当引发的不同类型的机械震动问题;
当我们在调试阶段需要测试不同的电动机、不同的速率或者评估电气或者机械方面的技术问题,这就需要经常连接/断开电动机;
固定键控连接器对于避免误连接至关重要,但是在高压和高电流情况下有很多麻烦;
连接器必须能够提供全面的保护,如由于疏忽造成的误接触,尤其是当电压超出安全限制的情况。这与应用场景和不同的国家标准相关,但是通常情况下是50V;
紧凑高密度的主要用于低压电子信号,可能不符合UL、CSA、CE或者其他监管部门定义的间隙要求。
幸运的是又一款易用易断开的连接器,非常适合电动机的高压和高电流要求,能够有效的避免上面所提出的技术问题,而且不会限制工程师设计的灵活性。
举个例子,Molex FiT连接器不仅能够输送电源,而且支持线对线、点对板卡、板卡对板卡之间的连接(见图4)。Molex系列连接器主要有五种产品,插针间距从2.50mm到5.70mm,每种都具有不同的电源等级。Nano-Fit是最小型的一款,支持20——26AWG规格的线缆以及250V5A。Mega-Fit是最大型的一款,支持12——16AWG规格的线缆以及600V23A的电力传输。
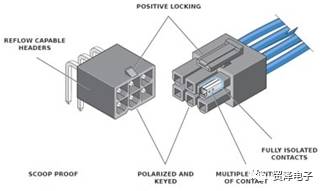
图4 MOSFET/IGBT驱动器与电动机之间的连接器必须能够处理高压和大电流情况,满足电力的传输。Molex FiT系列连接器有五种不同的尺寸,能够提供可靠安全高性能的连接(来源:Molex)
该系列的所有连接器都是相同的形状但是物理尺寸是不同的,都具有卡扣避免异常断开连接,而且能够有效的避免人员的误触。为了提升可靠性和降低压降和功率损失,每根连接管脚都具备多个点的金属对金属的接触。
结论
参考设计和评估板卡对于机器人系统设计越来越重要,这样可以加快产品开发,缩短产品面市的时间,尤其对于一些具有战略意义的应用来说非常重要。随着运动控制和机器人系统逐渐全部采用电气化/电子方式来实现,对于那些液压器的需求就会越来越少,IC器件供应商能够为整个系统或者子系统的设计提供全面的硬件和软件设计支持。也就是说工程师从事这方面的工程设计具有更多的选择性,采用最有的方式来解决开发过程中遇到的运动控制问题,最好拿出最优的解决方案。
-
机器人
+关注
关注
206文章
26974浏览量
201290 -
人工智能
+关注
关注
1775文章
43715浏览量
230489
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论