 Apollo轨迹规划技术分享Gitchat,一步帮你把车驶入正轨
Apollo轨迹规划技术分享Gitchat,一步帮你把车驶入正轨
听说你的无人车还不在状态?红黄绿交通灯识别不当,障碍物绕了又绕,这里有个机会助力你的车车步入“正轨”!
Apollo轨迹规划技术分享Gitchat,此次分享由百度高级架构师,百度Apollo平台规划方向技术负责人—Zhang Yajia讲解。
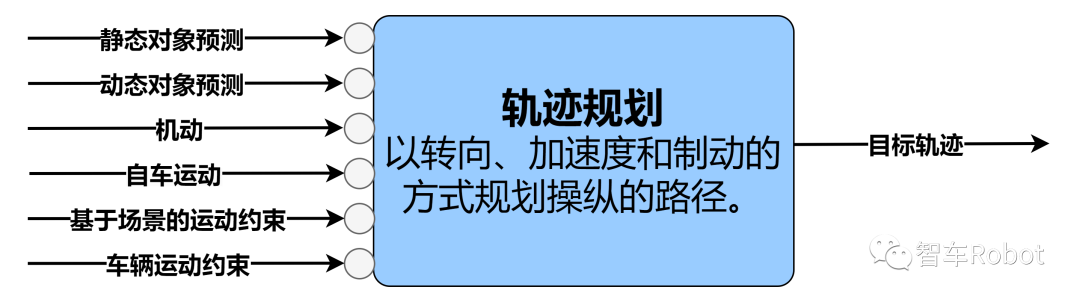
轨迹规划是无人驾驶系统的核心模块之一。轨迹规划的核心就是要解决车辆该怎么走的问题。轨迹规划的输入包括拓扑地图,障碍物及障碍物的预测轨迹,交通信号灯的状态,还有定位导航(因为要知道目的地是哪才能规划路径)、车辆状态等其他信息。而轨迹规划的输出就是一个轨迹,轨迹是一个时间到位置的函数,就是在特定的时刻车辆在特定的位置上。轨迹规划算法的优劣直接决定了无人驾驶车的安全性和舒适性,在无人驾驶系统中发挥着至关重要的作用。
轨迹规划本质上来说是一个优化问题。谈到优化问题,我们需要知道优化的约束和优化的目标。首先看约束,第一个约束就是车辆要遵守交规,这是强制性的约束;第二个约束是要避免碰撞;第三个约束是要使规划的轨迹在控制上可实现,不能出现规划了一个急弯的轨迹,车根本拐不过来的状况。而优化的目标总的来说就是要跟人开的像,具体表现就是让人乘坐起来感到舒适,但像人也有不同的优化目标。
在百度 Apollo 无人驾驶开源平台中,轨迹规划分为路径规划和速率规划两个顺序过程。路径规划结合道路边界线、静态障碍物的信息,产生轨迹的几何信息。速率规划在给定的路径下,考虑动态障碍物的预测轨迹、道路限速信息和决策信息,产生安全舒适的速率分配。
除了你,已有800+开发者Get新技能。本次分享会除了高质量干货分享,还包括与百度高级架构师,百度Apollo平台规划方向技术负责人——Zhang Yajia的问答互动,约等于一对一的授课,马上翻开小本本开始做课前准备。
我们目前从Zhang Yajia的Gitchat中瞄到了两段:轨迹规划的综述以及无人驾驶的位形与状态,先与你一起分享。
以下,ENJOY
轨迹规划的目标是计算出安全、舒适的轨迹供无人驾驶车辆完成预定的行驶任务。安全意味着车辆在行驶过程中与障碍物保持适当的距离,避免碰撞;舒适意味着给乘客提供舒适的乘坐体验,比如避免过急的加减速度,在弯道时适当减速避免过大的向心加速度等等;最后,完成行驶任务指规划出的轨迹要完成给定的行驶任务,不能因为过于保守的驾驶导致不可接受的行驶时间。
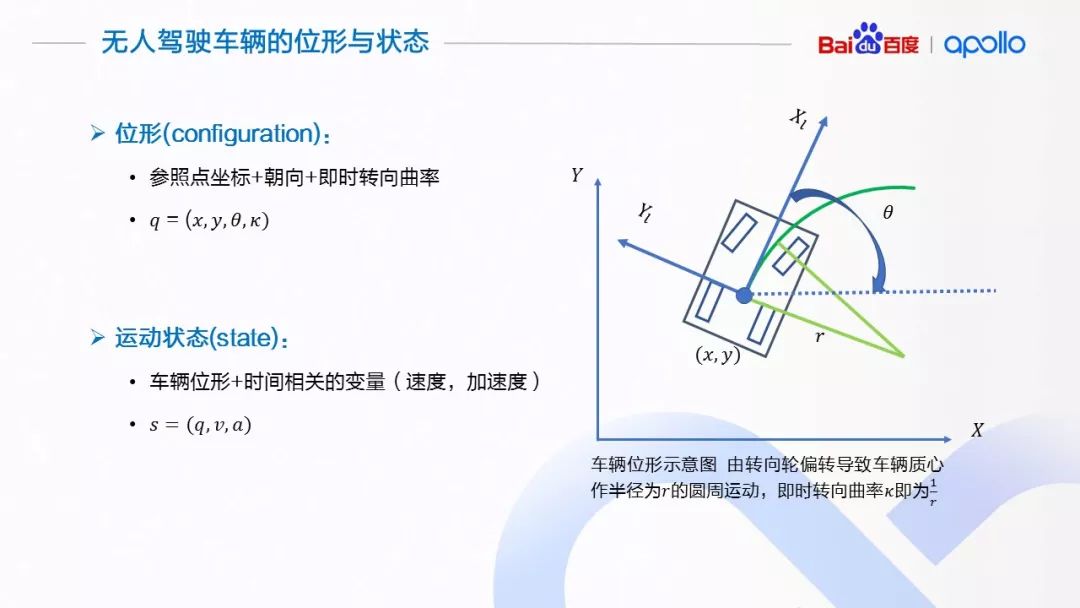
我们这里对轨迹规划问题作正式的定义。首先,我们介绍两个机器人领域的概念:位形(Configuration)是在所研究的规划问题中,能够唯一性的表达机器人状态的最小一组变量。变量的数量称为位形的维度。这里需要注意的是,位形空间的维度,即使对于同一个机器人来讲,所研究的问题不同,维度也是不同的。比如,对一个人形机器人来讲,如果规划问题是在三维空间中移动,位形需要由参照点的变换矩阵,关节的伸展角度组成;如果规划问题是作物体的操作(Manipulation Planning),则在前面问题位形空间的基础上,还要增加机器人手指关节的伸展角度等。
-
自动驾驶
+关注
关注
773文章
12978浏览量
163094 -
Apollo
+关注
关注
5文章
324浏览量
18289
原文标题:大咖面对面 | 一步帮你把车驶入正轨
文章出处:【微信号:Apollo_Developers,微信公众号:Apollo开发者社区】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
机器人支撑相足端轨迹
机器人摆动相轨迹设计
足端复合摆线轨迹介绍
六自由度机械臂轨迹规划仿真
自动驾驶轨迹规划之路径规划总结

请教大神,根据GIT上SDK配置指导,最后一步构建HELLO_WORD出现失败的原因
Apollo:规划技术功能概述
自动驾驶之路径规划





 工商网监
工商网监
评论