 视觉成像助力感知决策 图像增强引擎赋能自动驾驶
视觉成像助力感知决策 图像增强引擎赋能自动驾驶
由工业和信息化部人才交流中心、江北新区管理委员会主办,江北新区IC智慧谷、江北新区产业技术研创园承办的芯动力人才计划第三期人工智能芯片技术和应用研讨会在南京江北新区顺利举办。本次会议智车科技针对自动驾驶视觉传感器应用领域的相关内容对眼擎科技创始人朱继志进行了专访。
当下,人工智能正与各行各业水乳交融、渗透性高速发展,其发展速度得益于多种技术的融合式增长,大数据、算法、区块链、芯片、传感器等都对智能科技的发展产生深刻影响,尤其是芯片技术在人工智能领域的重要地位更是无可撼动,芯片技术的发展程度和质量能够决定或制约企业、行业甚至更广领域的成长。
近日,由工业和信息化部人才交流中心、江北新区管理委员会主办,江北新区IC智慧谷、江北新区产业技术研创园承办的芯动力人才计划第三期人工智能芯片技术和应用研讨会在南京江北新区顺利举办。清华大学王志华教授、韩国首尔大学Kiyoung Choi教授等26位专家围绕业内最新动态、前沿核心技术、精准发展预测展开主题分享,与会人员围绕人工智能芯片技术、智能硬件、智能驾驶、机器视觉、资本与路演等主题进行了交流探讨。
在活动主会场,新思科技亚太产品方案总经理谢仲辉进行了《人工智能与边缘计算-汽车电子人工智能解决方案的优化与验证》的主题演讲。他说,当前人工智能设计面临算力、应用场景等诸多挑战,不能只仅仅依靠中心计算,需要更好利用边缘计算,实现实时数据分析和智能化处理,这样也会更加高效、安全。
在自动驾驶领域,机器“驾驶员”的决策能力是关键,而最终的决策输出与任务执行都要依靠于前端感知和数据处理,在这部分系统方案中,视觉芯片的发展是当前最有接近性和普及型的发展较为成熟的内容,对人工智能芯片的研究讨论,不能忽视对视觉芯片的技术挖掘和分析。此次研讨会上,智能驾驶专场中也特别邀请成像增强引擎及芯片领域专家——眼擎科技CEO朱继志先生做了主题演讲,分析了自动驾驶中的图像增强及多摄像头融合的现阶段问题以及有哪些成熟解决方案分享。
眼擎科技创立于2014年,专注于成像增强引擎技术,公司的愿景是“让机器比人眼看的更清楚”。公司自主研发的eyemore成像引擎,解决了视觉领域在弱光、逆光等环境下不能正常成像的痛点。主要应用在轨道交通、自动驾驶、辅助驾驶、智能安防、机器人、智能医疗、3D等各种AI领域中,也是全球率先推出AI视觉高端成像增强引擎及整体解决方案的公司,致力于开发面向未来的超越人眼能力的视觉传感器。eyemore 芯片发布被列入“中国2017年人工智能十大事件之一”。智车科技针对自动驾驶视觉传感器应用领域的相关内容对眼擎科技创始人朱继志进行了专访。
Q:眼擎科技的定位是自动驾驶解决方案商还是硬件供应商?
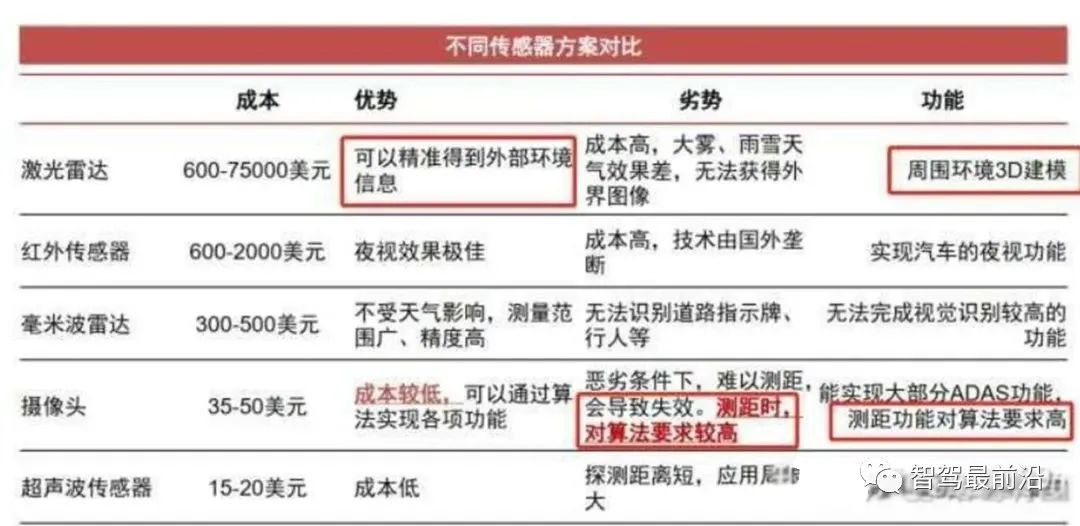
A:后者。自动驾驶方案商的业务核心是有自己的算法,在工作流程中与上游硬件——比如激光雷达、光电波、camera等——供应商合作,我们不提供自动驾驶整体解决方案,专注在视觉感知端成像环节提供硬件和解决方案。当然,我们以自动驾驶系统方案商为合作客户。
Q:在自动驾驶应用场景中,外界的视觉多是运动的,眼擎科技自动驾驶专用的视觉增强芯片和融合技术是否会受到速度的影响?
A:在自动驾驶视觉领域,目前的技术水平已经可以解决大部分动态场景,针对对高速运动、轻微抖动等问题,都已经存在相对成熟的解决方案。因此对我们来讲,动态场景不是障碍。但是整体来看,视觉系统分为感知端和认知端,感知端的环境千变万化,如果遇到大雾遮挡这种有视障物的情况出现时,还需要继续研发与更新相关的技术。但运动本身不是问题。
眼擎科技的图像增强引擎系列产品
Q:眼擎科技自动驾驶视觉方案,号称视觉动态范围会超过100db,可以解决95%的复杂光线问题,那剩余的5%是何种场景?
A:眼擎科技专注于做像人眼一样的成像引擎,英文名字为eyemore,寓意比人眼看得更多。所以说在评价我们的硬件能力是要与人眼相比较而言的。人工智能的方向不只是在大脑端向人类逼近,在感知端也要和人眼相比。目前公司在某些方面能够做到比人眼更强,但是综合来讲,与人眼还有一定的差距。相信在未来,随着技术的演进,计算能力越来越强,算法越来越成熟,camera的感知端能力超过人眼一定可以做到。
Q:眼擎科技的产品、定位与Mobileye比,有何差异性?
A:可以说Mobileye是一个完整的自动驾驶解决方案商,他们的工作包含很多种技术,从感知端到算法端再到决策端等,能够面向车厂提供完整的solution。而眼擎科技的定位是专注于感知端的成像处理及成像增强环节,不参与后端的图像分析、融合和决策环节。目前中国已经有大量在做自动驾驶系统方案的公司,我们在成像端做他们的合作伙伴。Mobileye是一个大系统,可能包含20个部分,眼擎科技专注于做一部分,即在复杂光线下提供更加可靠的图像输出,比如在暗光、逆光、反光等现实复杂环境下,我们在成像端的处理技术能够输出可靠性更高、品质更好、更方便于后续识别的图像。
Q:如何看待未来AI芯片的发展趋势?
A:首先,未来AI芯片的发展会是百花齐放的格局。以前芯片领域处于集中式垄断状态,一个行业有一两个芯片商很厉害,其他都无法与之匹敌,但如今AI芯片技术不是很成熟,有很多的不同的应用场景,所以相应会有很多不同类型的产品生产出来。
其次,未来的AI芯片发展的一个显著特点是差异化,不存在如蓝牙芯片一样的标准化协议,对新型产品公司有更大的包容度、更低的开放式门槛。最终形成一个分级分层和多元化的市场。
未来,芯动力人才计划将增加项目类别和活动数量,通过线上线下结合的形式开展集成电路全产业链相关活动,继续以全球视野整合产业资源,搭建园区、企业、人才等行业要素广泛参与、资源共享的交流平台,为业界人才提供学习、交流、合作、创业机会,为地方打造人才高地和产业名片,通过人才集聚实现产业集聚,形成人才创新创业强磁场。
-
传感器
+关注
关注
2522文章
47983浏览量
739674 -
芯片
+关注
关注
446文章
47701浏览量
408841 -
自动驾驶
+关注
关注
773文章
13000浏览量
163130
原文标题:视觉成像助力感知决策,图像增强引擎赋能自动驾驶
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
未来已来,多传感器融合感知是自动驾驶破局的关键
CMOS图像传感器为自动驾驶汽车提供视觉感知
LabVIEW开发自动驾驶的双目测距系统
自动驾驶路径跟踪控制的种类
自动驾驶中的多感知源/单感知源提升方案

【KV260视觉入门套件试用体验】八、VITis AI自动驾驶多任务执行MultiTask V3
CVPR上的新顶流:BEV自动驾驶感知新范式
自动驾驶中激光雷达和视觉感知的区别

浅析自动驾驶视觉感知算法

自动驾驶技术环境感知篇:基于视觉相关技术介绍

自动驾驶综述之定位、感知、规划常见算法汇总
自动驾驶决策概况
探讨自动驾驶系统感知系统
聊聊自动驾驶感知系统





 工商网监
工商网监
评论