 激光雷达探测技术新进展 迎来更加快速发展的新时期
激光雷达探测技术新进展 迎来更加快速发展的新时期
在武汉大学珞珈山上,夜间常常有一束绿色的荧光射向苍穹,与周边的建筑交相辉映,成为校园内一道独特的风景。这是武汉大学电子信息学院易帆教授牵头的武汉大气遥感国家野外科学观测研究站在进行雷达夜间作业。
珞珈山上的雷达站夜间工作图
日前,由易帆主持的国家重大科研仪器设备研制项目“快速精准测量0-35 km大气温度和气溶胶的先进拉曼激光雷达”,通过国家自然科学基金委员会组织的结题验收并获评优秀。
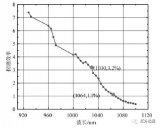
五年来,项目团队成功研制出具备高时空分辨精准测量大气温度和气溶胶的先进拉曼激光雷达系统。在15分/90米时空分辨率条件下,系统测温统计误差在18公里以内小于1K,在35公里以内小于2K,气溶胶体后向散射系数相对测量误差在12公里以内小于5%,为从近地表到低平流层的大气结构和动力学研究等提供了有力支撑。
先进拉曼激光雷达现场工作图
易帆团队长期以来致力于激光雷达遥感探测技术的发展,获得了国家自然科学基金杰出青年科学基金和创新研究群体项目支持。团队依托武汉大学遥感国家野外科学观测研究站的优势资源和力量,开展了卓有成效的研究,并取得了大量原创性科研成果。团队成果“建成亚洲功能最强大的中高层大气激光雷达综合探测平台”,曾入选《科技导报》中国年度十大重大科学、技术和工程进展。
什么是激光雷达系统
激光雷达(Light Detection And Ranging,LiDAR),是一种可以安装在不同遥感平台上的激光探测、测距和定位系统。它集激光测距、惯性测量、高精度定位等技术于一体,通过记录单个激光信号从发射到接收被地物反射的能量所历经的时间,并根据信号发出瞬间由定位定姿系统(POS)测定的激光扫描系统的位置和姿态,可以计算出地物目标的三维坐标,并绘制地形图。
机载激光雷达成像原理示意图
与常规摄影测量和遥感技术相比,利用激光雷达技术进行遥感数据获取具有采集速度快、自动化程度高、受天气影响小、数据生产周期短、几何精度高等特点,是获取高分辨率三维地球空间信息的一种新的技术手段。
激光雷达遥感作业时采用的搭载平台包括地面、车载、机载、船载、星载等多种遥感平台。其中,商业化的激光雷达系统以地面、车载及机载平台为主。其中的有人机载平台包括大型固定翼飞机及直升机平台,无人机载平台包括固定翼无人机、无人直升机、多旋翼无人机等。
以机载、车载激光雷达系统为例,典型的系统一般由以下主要部件组成:一套高精度定位定姿系统(POS),主要包括一个用于确定扫描投影中心的空间位置的动态差分GNSS接收机,以及一个用于高精度传感器空间姿态参数测量的惯性测量单元(IMU);激光扫描测距系统,用于测量传感器到地面点的距离;一套成像装置(主要是数码相机),用于获取对应地面的彩色数码影像,用于最终制作正射影像;一个控制与存储系统,用于控制激光扫描测距系统、GPS、IMU以及成像装置工作并存储获取的数据;一个操作终端,用于作业员对设备进行操作及状态监控;配套数据处理软件,如POS数据处理软件、点云生成软件等。
作业时,根据激光扫描仪测量的回波角度、距离,结合惯性测量单元(IMU)与差分GNSS测量的空间位置和姿态以及它们之间的几何位置关系,经过几何后处理可直接获取目标物的高密度三维点云空间位置信息,如图所示。
利用机载激光雷达获取的激光点云
由于一般的机载激光雷达系统都搭载有航空数码成像系统进行紧密集成,可以无需地面控制点直接获取地面点三维坐标并快速生成正射影像、建立区域三维表面模型或实体三维模型。获得数据成果除可以应用于测绘生产外,还可以广泛应用于铁路、交通、电力、林业、水利、海洋、地质、公安、石油等部门。
激光雷达技术的发展历程
激光雷达技术最早起源于20世纪60年代初期,主要用于气象研究中云的测量。1971年,美国宇航局使用阿波罗15号飞船上搭载的激光高度计进行了月球制图,随后受到广泛关注。20世纪70年代中期开始,美国等国先后试验成功了用于深海测深和水道测量的机载激光测距系统。20世纪80年代末,GPS定位技术的成功应用使得机载激光断面测量系统开始在一定范围内应用。20世纪90年代初,随着高精度GPS定位技术以及惯性导航技术(INS)的发展,为从空中直接、快速获取大范围地面目标的三维位置奠定了技术基础,并使得机载断面测量系统开始被激光扫描系统代替。机载激光扫描系统最早于1992年秋开始在美国实验室有研制的样机,其后看到试验成果。1996年国际摄影测量遥感学会(ISPRS)维也纳国际会议开始有一家机载激光扫描系统厂商参展,后来又有更多的厂商及更多的服务提供商进入机载激光扫描系统研究领域。目前国际上激光扫描系统主要厂商有Leica GeoSystems、Riegl、Optech、TopoSys、Trimble等。我国的中国科学院遥感应用研究所于20世纪90年代末在国家863计划支持下研制了中国机载激光三维成像仪,并成功开展了应用试验。2010年后,我国中科院光电院、北京北科天绘公司、北京四维远见公司等相关研究单位和公司推出了商用化的机载激光扫描系统、车载激光扫描系统,实现了激光扫描设备的国产化。
目前,随着传统行业对高精度地形地物测绘需求的扩大,以及无人机、无人车以及室内导航与位置服务等新型应用的兴起,国内激光雷达技术应用正在进入蓬勃发展的新时代。同时,随着激光雷达器件的技术进步,激光雷达系统在性能得到提升的同时,传感器也越来越小型化。以机载激光雷达系统为例,从原来的上百公斤的大型系统,到目前流行的10-30公斤的便携式小型系统。近年来,已经出现了可搭载于多旋翼无人机的2公斤左右重量的近距离激光雷达系统。
激光雷达技术还存在的问题
尽管近两年来激光雷达技术及其应用已得到蓬勃发展,但其在发展过程仍然存在一些待解决的问题,需要在今后的发展过程中进一步完善。
首先,激光雷达设备成本较高,规模化、批量化生产能力较弱。目前激光雷达系统设备的生产加工往往为按订单生产或小批量加工方式,自动化水平较低,生产、装配成本较高,导致其在相关领域应用普及较慢,还不能满足应用快速发展的需求。随着技术的发展,激光成像器件将由扫描成像激光雷达向固态成像激光雷达发展,可望进一步降低生产成本,实现大批量、规模化生产。
其次,激光器性能和数据采集效率还有待进一步提升。随着用户对大区域高密度点云的需求持续扩大,需要在获取高密度点云时保证较高的数据采集效率。然而,由于激光衍射极限限制,目前激光器探测能力已经逐渐逼近探测极限。因此,改进探测器的性能成为当务之急。单光子/量子成像激光雷达将成为未来激光雷达未来发展的重要方向。譬如,美国出现的盖格模式激光雷达,可在数万米高空获取每平米几十个点的高密度激光点云,可大大提高点云获取的效率。
然后,高性能、低成本、小型化激光雷达系统需求迫切。大型激光雷达设备势必需要搭载在大型平台上,机载雷达所需的大型无人机和有人机成本过高;同时,小型激光雷达系统受多旋翼无人机续航能力及自身性能限制,其作业时间较短,数据采集效率不高;此外,无人驾驶汽车技术的发展对小型化、低成本激光雷达的需求提出了更高的要求。这些需求成为推动激光雷达设备进一步小型化的动力。
在数据后处理软件的成熟度方面,当前点云数据处理还处在发展完善阶段,尤其是面向终端用户满足行业应用需求的定制化软件还处在不断发展完善中。
激光雷达技术的典型应用
利用获取的激光点云,通过去除部分噪声点并进行栅格化,可以快速生成高质量的数字表面模型(DSM)。同时,如利用自动化方法结合人工编辑对激光点云进行进一步的滤波操作,滤除其中的非地面点并进行栅格化,可以得到高质量的数字地形模型(DEM)。
机载激光雷达系统获取的高精度激光点云和地形三维模型,可以为勘察设计提供断面量测、坡度坡向量测、土方填挖量等信息,大大减少工程勘察设计中的外业工作量,缩短工作周期。
利用机载双波段激光雷达水深测量系统,可对水质较好区域的浅海海底地形进行精确测量,获取高精度海岸带及浅海海底地形数据,用于海岸带、滩涂防护及航道开发等应用。随着我国对海岛、海洋的开发和权益保护越来越重视,该方面应用具有较大的发展潜力。
利用激光同步定位于建图技术开发的推车或背包系统,可对室内进行便捷的三维成像,快速获取室内高精度激光点云模型,结合可见光相机成像,可快速形成可量测的室内街景及真三维模型,在室内导航与室内位置服务方面具有广泛的应用前景。
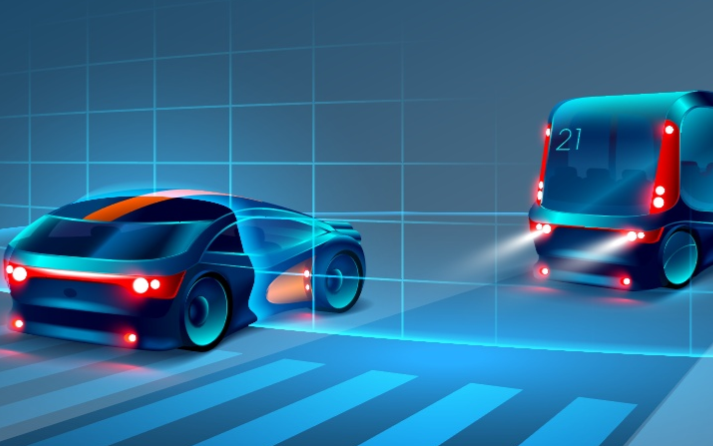
利用激光雷达技术可以获取道路及两侧一定范围内的高精度三维数据,可用于制作无人驾驶汽车用的高精度导航地图,准确标识车道位置及交通指示标志。同时,由于激光雷达具有全天时、全天候的测距能力,测量精度和测距能力受光照、气象、雾霾等条件影响较小,测距方向性和稳定性好,即便是恶劣的天气条件也能够正常工作。目前,激光雷达已成为无人驾驶技术中必不可少的“电子眼”,可以大大提高无人驾驶车辆的环境感知、智能决策以及车辆控制能力,成为无人驾驶汽车安全行驶的重要保障。
展望未来5-10年,激光雷达将迎来更加快速发展的新时期,激光雷达技术也将不再是一门少数专业用户使用的技术,而将成为走进千家万户,与我们生活息息相关的一门大众化技术。
-
传感器
+关注
关注
2525文章
48069浏览量
739986 -
激光雷达
+关注
关注
961文章
3647浏览量
186661 -
三维成像
+关注
关注
0文章
30浏览量
11002
原文标题:激光雷达探测技术新进展
文章出处:【微信号:WW_CGQJS,微信公众号:传感器技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
硅基片上激光雷达技术综述

激光雷达的探测技术介绍 机载激光雷达发展历程

激光雷达LIDAR基本工作原理

什么是激光雷达?激光雷达的构成与分类

激光雷达测量技术与应用
1030 nm单光子探测激光雷达技术研究

一文通过AEC-Q102车规级芯片测试认证了解激光雷达核心技术及行业格局
大FOV、小体积,超表面激光雷达又有新进展
激光雷达是什么 激光雷达介绍
浅析激光雷达细分市场、激光雷达发展现状

清华大学在超快激光微纳制造领域获得新进展







 工商网监
工商网监
评论