 人脑植入纳米机器人 秒速获取所有知识
人脑植入纳米机器人 秒速获取所有知识
近日,美国加州分子制造研究所的一项新研究项目“人脑/云接口系统”,可以将纳米机器植入人体。据悉,该技术可以使个体有能力在云端即刻获取人类积累的一切知识,从而大幅提高人类的学习能力和智力。我们仿佛离《黑客帝国》更近了!
万万没想到,我们离《黑客帝国》又近了一步。
在这部明见万里“预言书”般的电影中,主角托马斯.安德森(化名“尼奥”的黑客),为了搞清楚Matrix到底是什么,义无反顾吞下红色药丸,踏上探寻真相之路。
尼奥最终认清了Matrix就是AI人工智能创造的一种神经交互模拟系统,这一系统生成了一个“虚拟现实世界”,囚禁着所有人的意识。而“真实世界”已是残垣断壁、满目疮痍,残存的人类躲藏于地下城市锡安(Zion),竭尽所能的抵抗着AI人工智能的围剿。
整部影片中,这种神经交互模拟系统无疑是一大亮点。而近期的一项研究表明,我们离实现这个种系统更近了!
近日,美国加州分子制造研究所的一项新研究项目“人脑/云接口系统(B / CI)”,可以将纳米机器人植入人体,实现与网络的实时连接。
纳米机器人(Nanobots)是一种比人类头发丝的宽度还小的微型机器人,这种机器人有望在未来以各种方式造福人类和地球。但要实现B/CI,需要一种特殊的机器人:神经纳米机器人。
正如该领域资深研究人Robert Freitas, Jr.所说:
这些机器人将在人体血管系统内导航,穿过血脑屏障,并精确地在脑细胞之间、甚至脑细胞内部进行自动定位。然后,它们将编码的信息无线传输到一个基于云的超级计算机网络,以实现在网络中进行实时的大脑状态监测和数据提取。
而且,这种脑机接口问世的时间可能大大早于很多人的预期,或许几十年内就可以实现!
研究人员表示,虽然目前还没有进行大规模人类试验阶段,但这项新生技术已经存在,并在较小规模上取得了成功。
人脑/云接口,秒速获取人类所有知识
这项研究发表在了《前沿(Frontiers)》系列期刊中的神经科学板块中。
研究人员在论文中说,一个稳定、安全、实时的系统可以将云与人脑连接起来。实现这样一个系统的一种有希望的策略,称为“人脑/云接口”(B/CT),将基于一种称为“神经纳米机器人”(neuralnanorobotics)的技术。
研究人员预计,未来的神经纳米机器人技术将有望促进对影响人类大脑的~400种疾病进行精确诊断和最终治疗。
神经纳米机器人还将通过直接地检测大脑的∼86×109个神经元和∼2×1014个突触,使B/CI能够控制神经活动与外部数据存储和处理之间的连接。
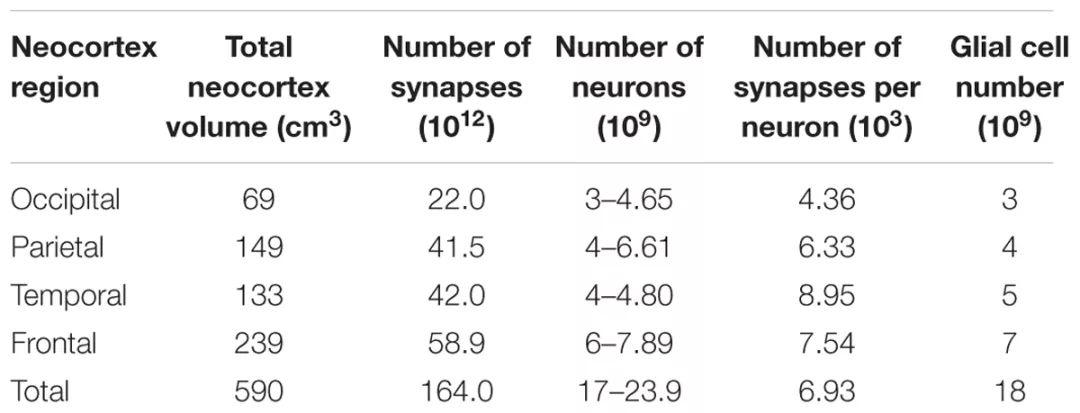
大脑新皮层中神经元和突触的计数
此外,通过在人体血管系统内进行导航,三种神经纳米机器人(endoneurobots,gliabots, 和synaptobots)还可以穿过血脑屏障(blood–brain barrier, BBB),进入脑实质,甚至进入单个脑细胞,分别在神经元的轴突初始段(endoneurobots)、神经胶质细胞内(gliabots)和亲密接近突触时 (synaptobots)进行自动定位。
然后,它们将通过辅助纳米机械光纤,以高达每秒∼6×1016比特的速度无线传输突触处理的信息和编码人脑电信息。辅助纳米光纤的传输能力达1018bits/每秒,并能为基于云的超级计算机提供快速的数据传输,以实现实时大脑状态监测和数据提取。
神经元 (蓝色) 和胶质 (白色) 细胞
基于神经纳米技术的人类B/CI可以允许人们直接、即时地访问几乎所有人类知识。
其他预期的应用包括改善教育、智力、娱乐、旅游和其他无数的互动体验。例如,专门的应用程序可以提供完全沉浸式体验/感官体验的能力,包括这里所说的“透明阴影”(TS)。通过TS,个人可以体验到其他自愿参与者(本地或远程)生活的片段。研究人员表示,希望这类应用能够鼓励和激发人类家庭所有成员之间更好的理解和宽容。
3种神经纳米机器人,实现人脑/云接口
神经纳米机器人有望提供一种非破坏性、实时、安全、长期,并且实际上是自主的体内系统,可实现首个有效的人类 B/CI。
如前文所述,监测细胞内结构和功能连接的是三类神经纳米机器人,分别是endoneurobots、synaptobots 和 gliabots。以及一个非侵入式、自安装的高速纳米光纤网络。
Endoneurobots
神经纳米机器人可能会通过皮肤注射,然后它们将在血管系统内导航,并锚定在血脑屏障的内皮细胞上。
Endoneurobots 是一种自主停留在神经元中的神经纳米机器人,它与 AIS 中所有~86 × 109 的人脑神经元相连接,直接监控并与基于动作电位的电处理信息相交互。
如图 3 所示,10μm3 的 endoneurobots 将进入脑实质,并开始在神经纤维网导航。
图 3:endoneurobot (左),具有钻石型的结构 (右)。
在这里,突触处理的基于动作电位的信息被视为基本信息,Synaptobots 将检测到所有这些信息及其波形,并向数据处理系统报告。
所有这些数据都将以亚毫秒级的分辨率连续处理,从而实现人脑和云之间的实时数据流。
Gliabots
Gliabots 是一种停留在神经胶质内的自主神经纳米机器人,可以监测人脑神经胶质细胞,并可能进一步作为系统的支持元素。
如图 4 所示,10μm3 的 gliabots 将进入各自的神经胶质细胞。
图 4:gliabots 的示意图
Synaptobots
Synaptobots 是停留在神经元中的自主神经纳米机器人,它可能使用多个灵活的纳米传感器与人脑中的所有~2×1014 个突触连接,以直接监控突触处理和存储的信息,并与之交互。
图 5 描述了 Synaptobots 的结构。
图 5:synaptobot (左) 和它的钻石型结构 (右)
辅助纳米纤维光学系统(图 6)与 endoneurobot 和 gliabot 的数据传输支持相结合,有助于最小化数据存储需求。
图 6:无线纳米级发射器
人类对脑机连接的探索永不止步
将人脑与计算机相连,是科学家们长期的疯狂而又浪漫的梦想。在这篇论文中,研究人员还列举了当前对脑机连接的研究中一些有前途的方法。
纳米粒子、纳米管和纳米点
有望与大脑神经网络实现接口的一种有前途的技术是磁电纳米粒子(magnetoelectric nanoparticles),该技术可用于增强外部磁场与神经网络发出的局部电场之间的耦合。
不过,将纳米粒子输送到人类大脑中是一个巨大的挑战。此外,在纳米粒子在人体内应用之前,必须有效地处理感染、炎症反应、潜在免疫原性、细胞毒性和致瘤性等风险。
基于碳纳米管的对大脑深处靶标进行电刺激已经被提出作为帕金森病和其他中枢神经系统疾病的一种新型治疗方式。
可注射的“神经织网”(Neural Lace)
最近提出的一种被称为“神经织网”(neural lace)的技术,可以在微观尺度将大脑神经网络和计算机系统进行整合。
这个概念基于超柔性网状纳米电子学,已经取得一定的进展。马斯克的Neuralink公司也正在研究这种技术。
神经尘埃(Neural Dust)
该技术采用数千个独立的10-100μm de传感器节点,称为。这些节点,称为“神经尘埃”(Neural Dust),可以检测并报告局部细胞外电生理数据,同时使用颅下询问器与每个节点建立电源和通信链路。
脑机接口(BMI)
脑机接口技术目前使用由神经微芯片传感器阵列组成的侵入性神经接口进行研究。神经芯片传感器阵列包含多个电极,可以检测多细胞信号。这些脑机接口已经对大脑的一些区域(例如,视觉皮层,运动皮层,海马体等)可用。
脑-脑接口(Brain-To-Brain Interface)
BTBI涉及诱导两个不同的大脑直接相互通信。BTBI系统最初使用非侵入性记录和脑刺激进行实验,如图2所示。
图2:人类受试者之间信息传递的脑-脑接口(BTBI)
Brainet系统
BTBI技术的一个特别有趣的应用,称为“Brainets”,涉及从多个大脑记录的神经元信号的接口和处理,以实现互连大脑之间的信息交换和执行合作任务。
虽然还不是特别复杂,但最近对老鼠和猴子的实验一定程度上证明了Brainet系统的效果,包括验证在大鼠的感觉运动皮层中永久植入微电极之后,位于不同大陆的两只大鼠的大脑之间潜在的直接通信。
-
机器人
+关注
关注
206文章
26976浏览量
201309 -
AI
+关注
关注
87文章
26364浏览量
263957
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论