 Apollo 3.5 技术架构详解全程回顾
Apollo 3.5 技术架构详解全程回顾
硬件平台主要是无人驾驶系统的计算硬件和各种传感器硬件,包括GPS/IMU、摄像头、激光雷达、毫米波雷达、HMI设备、黑盒子等。
开源软件平台是自动驾驶系统的核心部分,包括功能模块、运行框架和实时操作系统三部分。功能模块可细分为:
地图引擎:运行高精地图;
定位模块:通过GPS、V-SLAM、L-SLAM、里程计等多种定位源融合,结合高精地图,实现精准定位;
感知:通过激光雷达、毫米波雷达、摄像头,精确感知车辆周围的环境路况,包括车辆、行人、交通标志等等;
规划:主要包括路径规划、运动障碍物的预测等;
控制:实现控制车辆的转向、油门、刹车等操作;
End-to-End:基于深度学习的横向和纵向驾驶模型;
HMI:人机交互模块。
TIPS
本次沙龙课程,我们有请到百度Apollo资深技术布道师——胡旷来详细讲解Apollo3.5技术架构。
胡旷,中科院软件所计算机科学专业硕士,清华大学在读MBA。曾在IBM负责技术研发及创新管理工作,拥有4项美国专利。2014年加入百度担任技术管理岗位,目前是Apollo开源社区技术布道师,负责Apollo平台的车辆/硬件认证,并为生态伙伴提供软硬件解决方案咨询、帮助其落地Apollo解决方案。
在这次的分享中,胡旷将从Apollo3.5整体框架出发,为大家讲解全新版本的Apollo在城市驾驶能力、Apollo Cyber RT框架、硬件平台以及V2X车路协同这四大方面的重大升级,带领开发者更好的认识了解Apollo。
以下,ENJOY
Apollo 3.5是面向城市道路自动驾驶解决方案,能够处理更复杂的环境,具备更全面的能力。相对于以前的版本,Apollo 3.5 做了以下升级。
第一是首次具备处理城市道路自动驾驶能力。
第二是 Apollo 3.5硬件平台全新升级。
第三是实时通信框架Cyber RT。之前使用的是ROS, Apollo 3.5从ROS替换成了Apollo自研的专门应用于自动驾驶应用场景的通信框架 Cyber RT。
最后是应用于智慧交通的V2X。

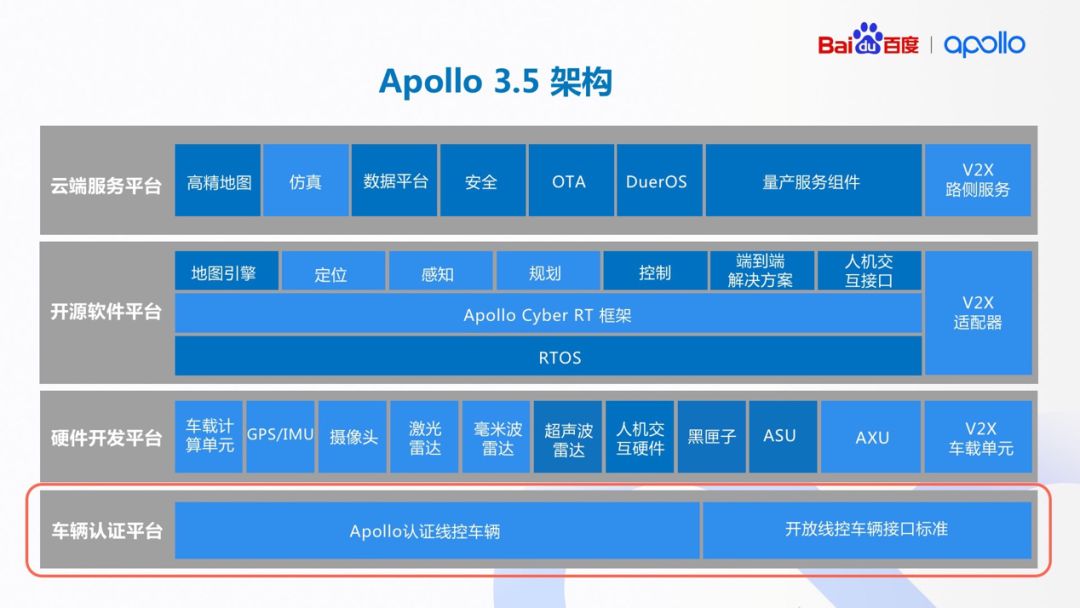
Apollo 3.5 架构
这是Apollo 3.5的架构图,还是基于经典的四层架构。Apollo 3.5对四大核心能力进行了升级。
首先是底层的车辆认证平台,主要包括两块,第一是符合Apollo标准的线控车辆的需求,第二是满足Apollo线控标准的车辆。
往上是硬件开发平台,硬件开发平台是做自动驾驶相关的硬件,这些蓝色的模块中有些是新增的硬件类型,有些是更新的硬件型号。
再往上是软件开放平台,开源代码大部分是在软件层面。Apollo3.5在定位、感知、规划、还有Cyber RT以及V2X的适配器等模块有变化。
最上层的云端服务在Apollo 3.5主要是仿真以及V2X的路侧服务。

线控车辆是做自动驾驶的第一道门槛。Apollo 3.5的开放车辆认证平台其实就是降低大家的第一道门槛。在Apollo 3.5中,我们联合车厂的伙伴一起做这个事情。
首先我们新增了两款国内车厂的车辆,第一是与广汽合作的GE3的开发者版本,另一个是与长城合作的WEYVV6。开发者可以买到这些车辆,并且比之前的要便宜,降低上车的门槛。此外,我们还升级了乘用车的线控标准,新增了小型车的认证标准。此外,我们还发布了更详细的适配Apollo车辆线控标准的流程以及测试标准。
在Apollo 3.5中,硬件开发平台整体传感器套件变化非常大。在Apollo 3.0的传感器套件方案中,车的顶部是64线主感知雷达,还有前方的一个毫米波雷达以及三个摄像头,还有GPS、IMU惯导系统。
Apollo 3.5的变化非常之大。首先主感知激光雷达从64线升级到了128线,同时还增加了三个16线激光雷达,分别布置在车辆的正前方,以及车后部两侧,毫米波雷达也从之前的正前方的一个变成现在两个,分别是正前方一个,车后部一个,这也是为了支持倒车的场景。摄像头现在也是做环式,增加到10个。
其次我们还新增了很多的适配硬件,大家可以根据自己的场景做更深入的适配,而且还包括一些符合车规级的感知设备,主要是为将来的量产做准备。
第三点是开源软件平台,这一块重点介绍规划、感知模块还和Cyber RT。

在以前的自动驾驶场景中间,使用同一个配置来处理不同用户场景的问题。在Apollo 3.5中,我们要面临复杂城市道路,有更多的用户场景,我们提出了基于Scenario的规划。
Planner是解决自动驾驶的局部规划,Routing是解决全局规划。具体而言,规划就是基于地图、全局导航路径、定位、车辆状态(包括:位置、速度、加速度、底盘)、障碍物的感知及预测信息,计算出可供控制模块(Controller)执行的一条安全且舒适的行驶路径。
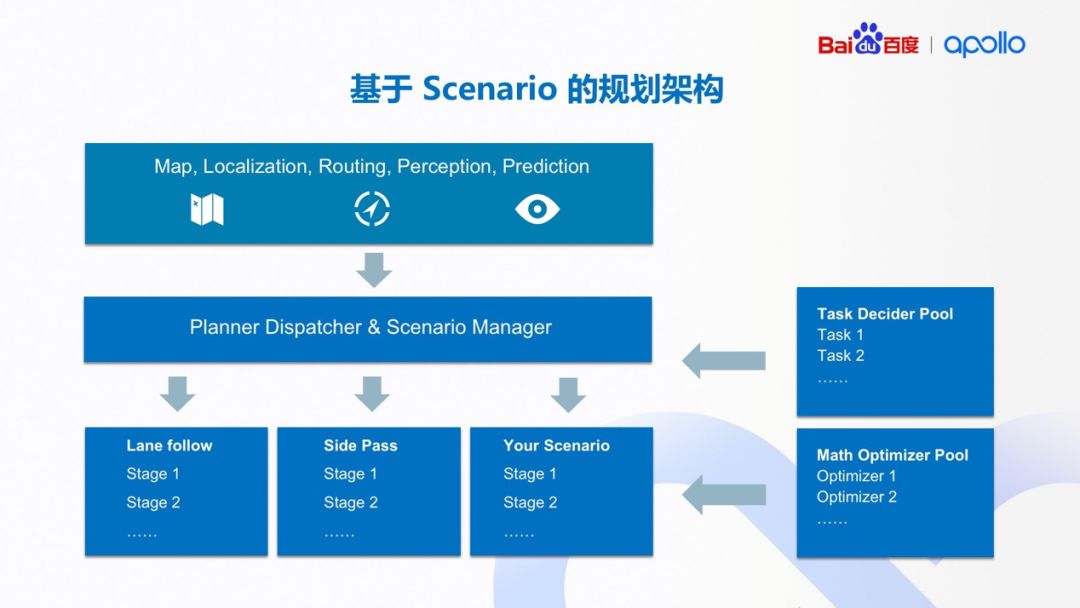
基于Scenario的规划架构
如图所示,从顶部的输入开始,通过Planner的Dispatcher生成Planner。
这个规划框架带来了以下优点:
架构可扩展且灵活
可以订制自己的Scenario
可以根据每一个Scenario精调性能
可以复用决策器和优化器
下面给大家看一个例子,这是一个很常见的车辆行驶场景,这个场景由四个Scenarios来组成,第一个Scenario车辆会做前面的跟车,车道保持,Lane Follow,探测到的行人在一定时间内保持静止状态,这个时候可能选择侧道超车,超完车之后继续做Lane Follow,后面有一个Stop Sign来继续行进,这是一个很常见的场景。
一个场景由连续多个Scenarios组成
再细看下刚才场景中间的某一个Scenario。Scenario是由多个Stages组成的,再来看Side Pass有哪些Stages,前面有障碍物要减速,生成减速的轨迹线,之后第二个Stages停在离前方障碍物的安全距离内,观察情况确保安全。第三步在确保安全的前提下,生成了Side Pass的轨迹线,这就是Side Pass所经历的三个Stages。
一个Scenario由连续多个Stages组成
Apollo 3.5默认支持这些道路场景、隔离带道路、小巷道,减速带、禁停区、人行道还有旁边有车辆停的道路,以及交叉路口、全向停止标志。还有像开放空间对于停车、倒车、泊车这些场景的支持。
在Apollo 3.5 中,感知套件的变化非常大,主要表现在:第一新的感知系统能够帮助Apollo系统看得更全,实现360度无死角,无盲区的覆盖。第二基于128线的激光雷达能看得更远。第三是更灵活,根据场景以及硬件配置融合的机制。

多视角感知架构
这个是新的感知的架构图,主要还是三类感知设备。从图中看出,使用深度网络解决交通信号灯检测、车道检测以及障碍物的问题和点云的分割。之后再做后向的融合、输出。交通信号灯是基于两个摄像头来做的,而其他的功能我们会基于三类感知设备。

开源软件的另一重点,也是Apollo四个核心开放能力里面的一个重点,即Cyber RT。
Cyber RT是系统应用层和操作系统层的一个中间件, Apollo之前是使用ROS,为什么Apollo 3.5要替换成Cyber RT呢?
大家都知道ROS是基于在机器人行业用得非常的广泛的实时通信系统,但是把它用在自动驾驶场景里会面临很多的挑战。
1)ROS调度的不确定性。ROS的调度依赖linux的通用系统调度,不清楚业务逻辑。自动驾驶是专用系统,任务需要按照业务优先级调度。其低延迟要求比高吞吐要求更高。
2)ROS通信的开销。Apollo前期曾经使用共享内存去降低ROS原生的通信开销的问题。
3)非自动驾驶领域专用,存在其他问题等。
使用Cyber RT有以下优势:
1)非常简易的部署体验,不用关注其调度机制与通信机制,就能提供非常好的性能,且不需要复杂的配置。
2)加速自动驾驶开发,自研减少了很多底层的依赖,迁移到不同的计算平台的时候就会相对容易。
3)专注自动驾驶,为自动驾驶解决方案赋能。它是相对独立的开源实时计算框架,并且专为自动驾驶设计的组件模块,基于Cyber,简化搭建自动驾驶应用的流程。
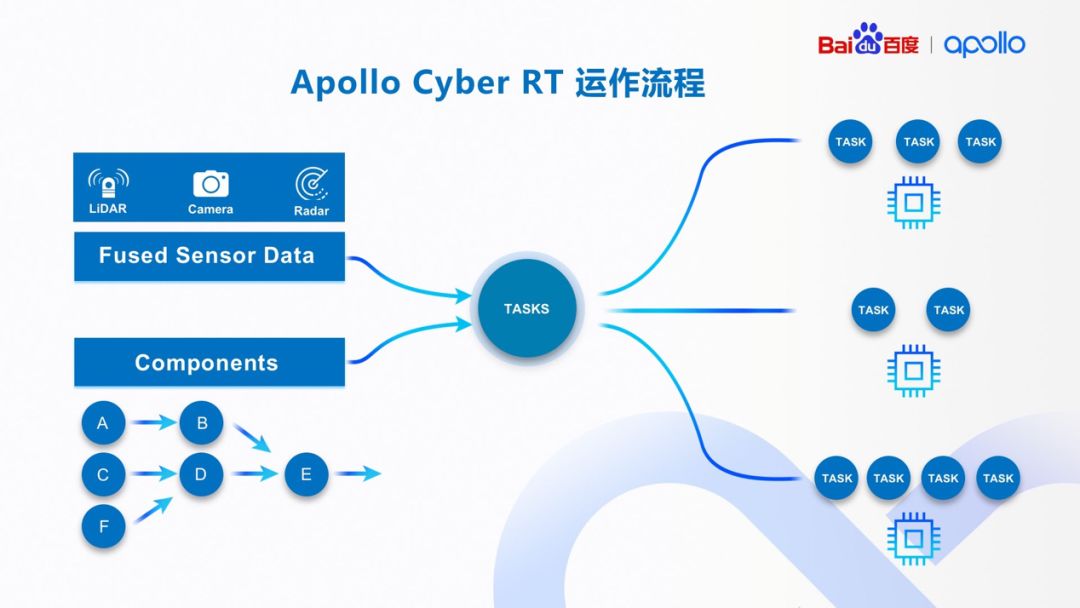
Apollo Cyber RT运作流程
Cyber中通过Components来封装每个算法模块,通过有向无环图(DAG)来描述Components之间的逻辑关系。对于每个算法模块,也有其优先级、运行时间、使用资源等方面的配置。系统启动时,结合DAG、调度配置等,创建相应的任务,从框架内部来讲,就是协程,调度器把任务放到各个Processor的队列中。然后,由Sensor输入的数据,驱动整个系统运转。

V2X是推动自动驾驶另外一条技术路线,跟自感知相比是另外一种路线。当然它与自感知技术协作的话能更快地帮助自动驾驶落地,Apollo 3.5提供了V2X的解决方案。
Apollo 3.5 智能车辆基础设施协作系统(IVICS)架构图
这是Apollo V2X的架构图,其包括硬件平台的OBU,软件平台的Adapter,以及云端的路侧服务。
-
毫米波雷达
+关注
关注
105文章
945浏览量
63291 -
Apollo
+关注
关注
5文章
326浏览量
18292 -
深度学习
+关注
关注
73文章
5236浏览量
119895
原文标题:沙龙回顾 | Apollo 3.5 技术架构详解
文章出处:【微信号:Apollo_Developers,微信公众号:Apollo开发者社区】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐







 工商网监
工商网监
评论